(54) УСТАНОВКА ДЛЯ ПОДАЧИ СТЕРЖНЕЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Технологическая линия для изготовления строительных изделий | 1986 |
|
SU1426801A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Устройство для перемещения изделий через ванны | 1982 |
|
SU1006347A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| СПОСОБ СБОРКИ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2657816C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Устройство для укладки огнеупоровВ цЕМЕНТНОй пЕчи | 1979 |
|
SU808815A1 |
| Технологическая линия для изготовления строительных изделий | 1978 |
|
SU903112A1 |

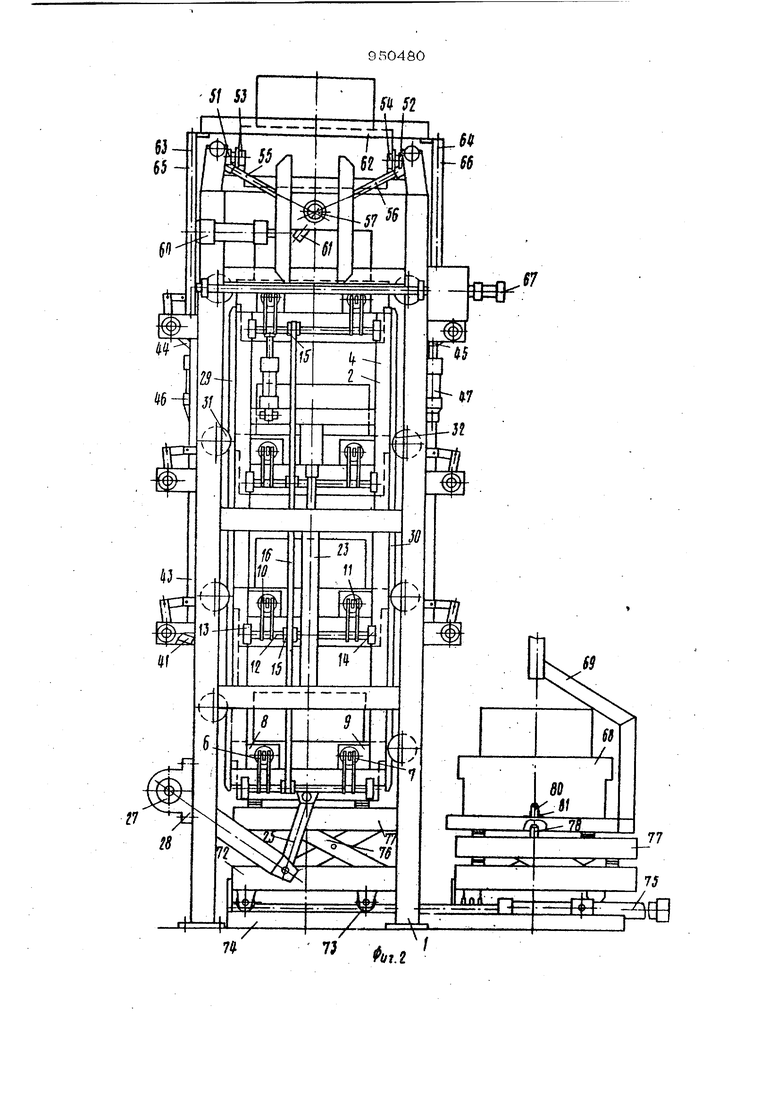
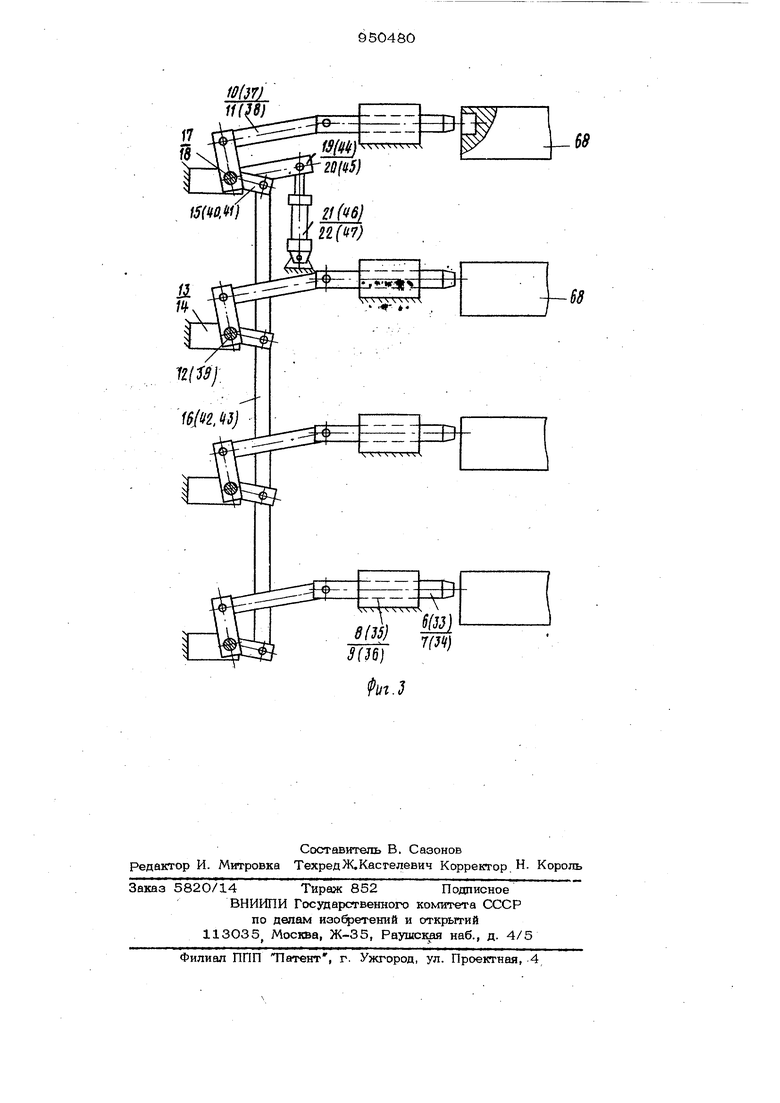
Изобретение относится к литейному производству, а точнее к транспортным средствам, передающим стержень в кондукторе от стержневой машины к позиции простановки стержнейв литейную форму. Известно устройство для просгановки стержней в формы, содержащее тележку, размещенную в направляющих рамы с воз можностью горизонтального возвратнопоступательного перемещения с позиции на п ззицию с помощью силового привода. На тележке смонтировано подъемное устрой ство с захватньгм органом в ьнде пневмо фиксаторов. Подъемное устройство имеет возможность возвратно-поступательного вертикального перемещения с помощью индивидуального силового привода. Стерж ни на стержневых плитах рольгангом подают на позицию под захват, затем стер жень фиксируют с помощью фиксатора, поднимают вверх, переносят на позицию над конвейером с линейными формами и опускают в полость формы. Данное устройство предназначено для транспортировки стержня без кондуктора с одной позиции на другую, находящихся на одном уровне f1J . Наиболее близким к изобретению по технической сущности и достигаемому эффекту, является устройство, содержащее средство для подъема и опускания кондуктора с силовым приводом и элементами фиксации кондуктора в процессе перемещения в вертикальном направлении, и средством горизонтального перемещения кондуктора с позиции на позицию 2 . Однако часто возникает необходимость подавать стержень от стержневой мащины к литейному конвейеру, находящихся на разных уровнях (этажах). Известные устройства в таком случае использовать нельзя, потому что невозможно изъять стержень из кондуктора в верхнем положении, так как доступ к нему перекрыт Тележкой. Кроме того, невозможно осуществлять подъем грузов на значктелпьную высоту с помощью гидрб- или пневмоцилиндра затруднительно, так как указанные силовые приводы ненадежны в работе-при больших ходах поршня, а иногда требуемый, по высоте подъем конструктивно неосуществим. Известное устройство для перемещения груза с позиции на позицию предусматривает четкое совпадение ритма работы технологического оборудования, так как в случае их значительного развития в такую жесткую систе му невозможно встроить накопитель, а без него такую систему невозможно использовать. Цель изобретения - обеспечение надежной работы в качестве единого автом тизированного комплекса технологическог рборудования, имеющего различную производительность и размещенного согласно техпроцессу на различных уровнях. Поставленная цель достигается тем, тдго в установке, содержащей средство для подъема и опускания кондуктора с си ловым приводом и элементами фиксации кондуктора в процессе перемещения в вер тикальном направлении, и средство го.ризонтального перемещения контура с позиции на позицию, средство для подъема и опускания вьшолнено в виде двух параллельно установленных подъемников, независимых от средства горизонтального перемещения кондуктора, причем каждый из подъемников выполнен в виде двух параллельных вертикальных многоярусных кареток с индивидуальными приводами, соединенных посредством синхронизатора, а каждый ярус каретки снабжен двумя фиксаторами, установленными с Бозможно тью горизонтального перемещения от еди ного силового привода, связанного с ним через щарнирно-рычажную систему и соответствующий вал-синхронизатор, а на раме установки в одной плоскости с фиксаторами кареток и перпендикулярно им, противонаправлено установлены аналогичные фиксаторы, связанные также шарнирн рычажной системой и валами синхронизаторами с собственным силовым приводом при этом средство для горизонтального перемещения кондукторов вьшолнено в ви де рольганга с раздвижными секциями, размещенными над подъемниками и двухцепного толкателя. На фиг. 1 представлена установка, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - схема щарнирно-рычажной системы кареток подъемников и боковых фиксаторов, размещенных на раме установки. Установка содержит раму 1,, на кото- рой смонтированы два параллельных вер9804 тикальных подъемника 2 и 3. Каждый из подъемников включает в себя две каретки 4 и 5, представляющие собой вертикальную рамную конструкцию. На каждо(4 раме попарно ярусами (в предлагаемом варианте четыре яруса) закреплены цилиндрические фиксаторы 6 и 7, установленные с возможностью горизонтального перемешения в корпусах 8 и 9, жестко закрепленных соответственно на раме каретки. Фиксаторы, размещенные на каждой каретке подъемника, соосны и противонаправлены друг другу. Каждый из Фиксаторов одной пары путем шарнирнорычажной системы 10 и 11 жестко связан с валом-синхронизатором 12, закрепленным в опорах 13 и 14 на соответствующей раме каретки с возможностью поворота. Каждый из валов-синхронизаторов одной каретки посредством жестко закрепленного на нем рычага 15 щарнирно связан с тягой 16. На верхних валахсинхронизаторах 17 и 18 каждой каретки жестко закреплены рычаги 19 и 2О. щарнирно связанные со штоком соответствующего силового привода 21 и 22, в свою очередь щарнирно закрепленных на рамах кареток 4 и 5. Синхронная работа фиксаторов обеих кареток обеспечивается системой управления. Рама каждой каретки щарнирно соединена с соответствующим силовым приво.дом 23 и 24, жестко закрепленным на раме 1 установки. При этом рама каждой из кареток щарнирно-рычажной системой 25 тл 26 жестко связана синхронизатором 27, установленным с возможностью поворота в опорах 28, смонтированных на раме 1. На раме усгановки предусмотрены ограничители (не показаны) хода кареток в верхнем и нижнем положениях, на рамах кареток с боков смонтированы направляющие рельсы 29 и 30, установленные с возможностью взаимодействия с роликами 31 и 32, закрепленными на вертикальных стойках рамы I-.На раме 1 перпенди:1сулярно фиксаторам кареток и в одной плоскости с ними противоположно друг другу попарно установлены аналогичные фиксаторы 33 и 34 с возможностью возвратнЭ-поступательного перемещения в корпусазс 35 и 36, смонтированных на раме 1. Причем фиксаторы установлены во всех ярусах, кроме крайнего нижнего и верхнего. Каждая пара фиксаторов соответствуклцей щарнирнорычажной системой 37 и 38 жестко связана с валом-синхронизатором 39. 59 Каждый из упомянутых валов рычагом 40 и 41 соединен с тягой 42 и 43 . При этом секции между собой соединены .шарнирнр.. На верхних валах-синхронизаторах жестко закреплены рычаги 44 45, шарнирно соединенных со штоками силовых приводов 46 и 47. шарнирно установленных на раме 1. Их синхронная работа обеспечивается системой управл ния. Второй вертикальный подъемник 3 выполнен аналогично подъемнику 2, т.е. также содержит каретки с фиксаторами и фиксаторы, смонтированные на раме 1 установки. На верхней части рамы 1 над подъемниками 2 и 3 установлен трехсекционный рольганг. Непосредственно над подъе никами размешены раздвижные секции 48 и 49, а между ними стапионарных участок 5О рольганга. Каждая из раздвижных секций рольганга содержит две пластины 51 и 52, на каждой из которых установлен соотвествующий ряд роликов 53 и 54. Кажда из пластин посредством шарнирно-рычажной системы 5.5 и. 56 связана с валом 57, установленным в опорах 58 и 59 на раме 1 с возможностью поворота от силового привода 6О через посредство рычагов 61. На раме 1 с возможностью перемеще ния вдоль рольганга установлен двухцепной толкатель 62. Каждая Из цепных передач 63 и 64 размещена в направляющих 65 и 66 имеет привод 67 в виде гидромотора . Для ограничения хода толкателя предусмотрены амортизаторы (не показаны). Для транспортировки кондукторов 68 со стержнями от стержневой машины (не показана) к установке для их перемещения на позицию сборки предназначен подвесной толкающий конвейер (не показан) с подвеака л1. 69 вилочного Tvma: Для перемещения кондуктора со стержнем на установку для подачи последнего на позицию сборки (установка стержня ъ литейную-форму), а также пустого кондуктора на подвеску конвейера предназначены две тележки аналогичной конструкции 70 и 71. Каждая из тележек вьшолнена следующим офазом. Рама нижняя 72 на роликах 73 установлена на направляющих 74 с возможностью горизонтального возвратно-поступательного перемещения с помощью силового привода 75. На нижней раме с помоишю шарнирнорычажной системы 76 типа пантограф ( установлена верхняя рама 77 с возмож80ностью вертикального перемещения привода (не показан). На раме 77 закреплены направлякщие штыри 78, предназначетгые для взаимодействия со втул ками 79 на кондукторе 68. На подвеске 69вьшолнены направлякшие штыри 8О; установленные шире, чем штыри на раме 77, с возможностью взаимодействия со втулками 81 на кондукторе. Для ограничения ход а, тележек служат ограничители (не показаны). В установке предусмотрена система управления. Установка работает следуклцим образом. Кондуктор 68 вместе со стержнем поступает на подвеске 69 подвесного толкающего конвейера на позицию над тележкой 7О. При этом кондуктор размещен на подвеске на штырях 80. Над тележкой происходит остановка соответствуюш.ей подвески. Затем включают привод подъема и верхняя рама 77 осуществляет подъем вверх. Штыри 78 входят в соответствующие втулки 79 на кондукторе. Причем подъем дроисходит до тех пор, пока кондуктор не снимут со штырей ВО подвески. При этом наружные габариты рамы 77 меньше внутренних габаритов вилкоофазной подвески. Затем тележку 70вместе с кондуктором 68, содержащим стержень, приводом 75 перемещают на позицию, соосную с подъемником 2. При этом кондуктор размешен таким образом, что имеющиеся на нем посадочные отверстия, оказьюаются соосными с фиксаторами е и 7 на первом ярусе каретки 4 и 5. Приводы 21 и 22 через шарнирнр-рычажную систему 10 и 11 и тяги 16 осуществляют ввод фиксаторов в посадочные отверстия кондуктора 68, который оказьгоается надежно зафиксированным. После этого поступает команда на приводы 23 и 24 кареток, и происходит подъем кареток вверх. При этом кон.цуктор поднимается на один шаг и оказывается на уровне (второго яруса), на котором фиксаторы 33 и 34 оказываются соосно расположенными напротив соответствующих посадочных отверстий на кондукторе 68 (посадочные отверстия под фиксаторы предусмотрены на всех боковых сторонах кондуктора). Поступает команда на приводы 46 и 47, которые через шарнирно-рычажную систему 37 и 38 и тяги 42 и 43 осушествляют ввод фиксаторов 33 и 34- в посадочные отверстия кондуктора. После того как упомянутые фиксаторы надежно зафиксируют кондуктор, подают команду на приводы 21 и 22 фиксаторов 6 и 7, которые возвращают та в исходное положение, выводя из отверстий кондуктора; После этого следует команда на опускание кареток 4 и 5 в исходное положение, а верхней рамы 77 на опускание, а затем возврат тележки 70 на позицию под подвеску конвейера. Таким образом тележка готова к приему следующего кондуктора и передаче его описаню м путем на подъем ник 2. Причем при захвате второго кондуктора первым ярусом фиксаторов 6 и 7 аналогичные фиксаторы второго яруса захватывают первый кондуктор, а фиксаторы 33 и 34 возвращаются в исходное положение. Затем происходит подъем кареток вверх и соответствующая фиксация первого кондуктора на следующем ярусе фиксаторами 33 и 34, а второго кондуктора на предыдущем ярусе такими жефиксаторами. После этого все опять возвращается в исходное положение и тележка 7О готова принять тре тий кондуктор. Таким образом, происходит ступенчатый подъем кондукторов под
емником 2 до верхнего яруса кареток 4 и 5, где отсутствуют фиксаторы на раме 1, В тот момент, когда кондуктор, зафиксированный последним ярусом фиксаторов карет ок, находится в крайнем верхHtiM положении, поступает команда на привод 60, который через рычаг 61 и шарнирно-рычажную систему 55. и 56 производит поворот секций рольганга (пластины 51 и 52 с роликами 53 и 54 в положение под кондуктор, который оказывается размепхенным под ними с больщим зазором. После этого происходит расфиксация кондуктора, и он оказывается pacпoлoжeнньпvI на роликах. Затем происходит опускание кареток вниз описанным образом.
Специальными средствами (не показаны) стержнеь извлекают из кондуктора и переносят на позицию простановки в литейную форму. После этого толкатель 62 с помощью привода .67 перемещает порожний кондуктор на позицию над подъемником 3 на соо -ветствуклцую раздвижную секцию рольганга, которая как и nepвая в этот момент находится в горизонтальном положении. После этого каретки подъемника 3 аналогичной конструкции поднимаклрся вверх, и их фиксаторы входят в отверстие кондуктора. После чего секции рольганга разводятся, а кондуктор опускается на ярус ниже, где его фиксируют фиксаторы, установленные на раме 1. Каретки возвращаются вверх за слеS
ступенчатому перемещению кондукторов, стержневая мащина и литейный конвейер могут иметь различный темп (производительность) . Поэтому предлагаемая система более гибкая и надежная в работе.
Формула изобретения
Установка для подачи стержней в кондукторах, содержащая средство для подъема и опускания кондуктора с силовым приводом и элементами фиксации кондуктора в процессе перемещения в вертикальном направлении и средство для горизонтального перемещения кондуктора с позиции на позицию, отличающаяся тем, что, с целью эбеспечения надежной работы в качестве единого автоматизированного комплекс:а технологическго оборудования, имеюще.го различную производительности и размещенного согласно техпроцессу на различных уровнях, SO8 дукщим порожним кондуктором. При этом их фиксаторы на последующем от верхнего яруса фиксирукт кондуктор, Ht. ход1пцийся в фиксаторах рамы. Последние освобождают кондуктор, и он кареткой опускается еще на ярус ниже, где все повторяется снова. Таким образом, порожние кондукторы последовательно опускаются на нижний ярус,, где соответствующая тележ:ка 71, аналогичная по конструкции тележке 70, принимает кондуктор и подает его на порожнюю подвеску конвбйера, при этом все механизмы работают в обратной последовательности, по сравнению с подъемом. Цикл установки рассчитан таким образом, что кондуктор приходит на ту же подвеску, с которой снят вместе со стержнем тележкой 70. Предла.гаемая установка позволяет автоматизировать процесс передачи стержня с одной текнологической позиции на другую, находящигтся на разных уровнях (этажах), при ai-oM благодаря Д подъема и опускания вьшолнено в виде двух паралле;1ьно установленных подъемников, не зависимых от средства для горизонтального перемещения кондуктора, при этом каждый из подъемников вьшолнен в виде двух параллельных вертикальных многоярусных кареток с индивидуальными приводами, соединенных посредством синхронизатора, причем каждый ярус каретки снабжен двумя фиксаторами, установлетооми с воэможнсхлъю горизонтального перемвцения от единого силового привода, связанного с ними через шарйирно-рычажную систему и соответствующий вал-синхронизатор, а на раме установки в одной плоскости с фиксаторами кареток и перпендикулярно им противонаправленно установлены аналогичны фиксетгоры, связанные также шарнирно- рычажной системой и валами-синхронизаторами с собственным силовым приводом, при
этом средство для горизонтального перемещения кондукторов выполнено в виде рольганга, с раздвижными секшшмв, раэмещеннымн над подъемниками, и двухцеп ного толкателя.
ИСТОЧНИКЕ информации, принятые во внимание при экспертизе
17
)
(Щ 3(36)
