1
Изобретение относится к подъемно-транспортному машиностроению, в частности к механизму стопорения грузовой каретки строительного подъемника.
Цель изобретения - снижение трудозатрат и обеспечение безопасности.
На фиг. 1 показан подъемник, общий вид; на фиг. 2 - узел I на фиг. 1 (положение стопорного механизма до наезда на линейку); на фиг. 3 - то же, положение стопорного механизма в момент срабатывания ею при наезде на линейку; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - узел II на фиг. 2; на фиг. 7 - разрез Д-Д на фиг. 6.
Подъемник содержит мачту 1, на которой на ходовых роликах (не показаны) перемещается грузовая каретка 2, подвешенная на грузовом канате, запасованном на ба- рабапе грузовой лебедки (не показана). На каретке 2 находится установленная на оси 3 новоротная вилка 4. К корпусу вилки -1 жестко прикреплен рычаг 5, на котором установлен ролик 6 с возможностью перемещения вдоль своей оси 7 и фик- ч | .р ннлнйея на ней в определенном положении.
В местах предполагаемых остановок на мачк- 1 установлены выключающие линей- кн 8, смещенные на соответствующее каждому лажу расстояние относительно направляющей.
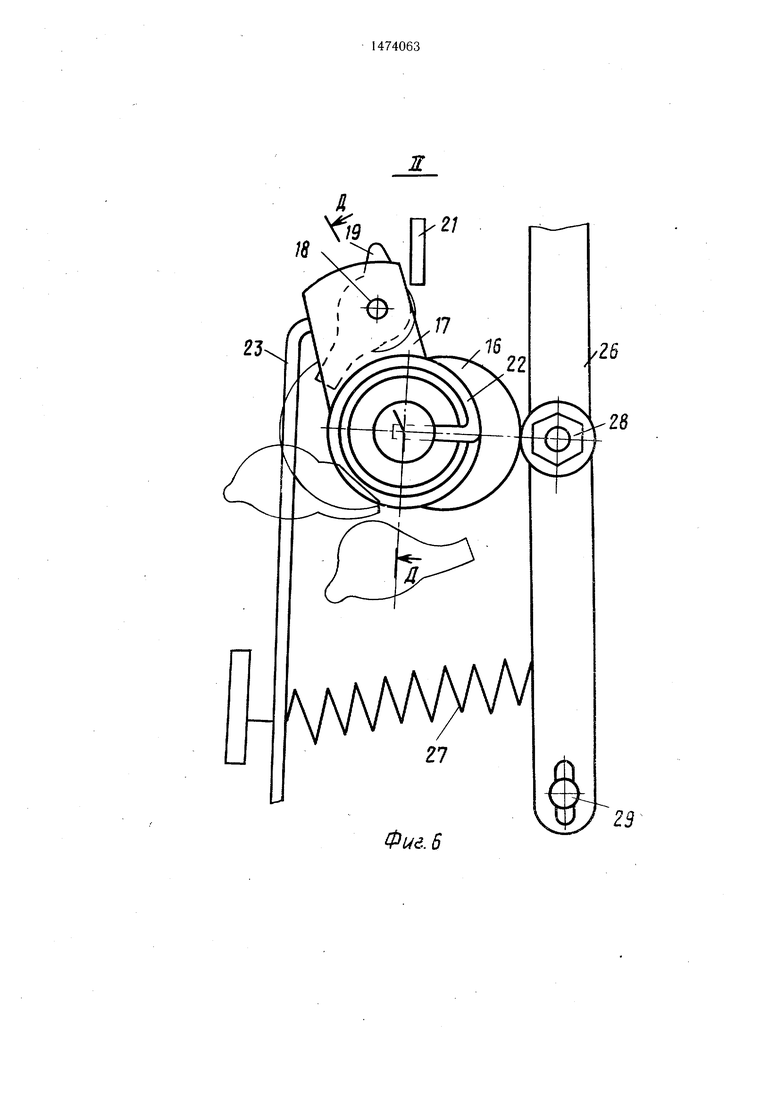
Поворотная вилка 4 снабжена пальцами 9, между которыми проходит сигнальный канат 10, закрепленный в верхней части мачты 1, а в нижней - прикрепленный к плечу рычага И, установленного на оси его вращения в основании мачты 1. Над рычагом установлен конечный выключатель 12, включенный в цепь питания электродвигателя подьемника. На каретке 2 установлена ось 13, на которую надета втулка 14 с возможностью вращения. Кроме того, на оси 13 надет храповик 15, который жест
ко связан с надетым на ось 13 профилированным кулачком 16. К втулке 14 жестко прикреплена пластина 17, на которой установлена ось 18. На оси 18 надета собачка 19, снабженная возвратной пружиной (не показана) и находящаяся в зацеплении с храповиком 15. На каретке 2 установлены упоры 20 и 21 и на оси 13 надета возвратная пружина 22, взаимодействующая со втулкой 14. Пластина 17 связана гибкой тягой 23 с вилкой 4 при помощи рычага 24, жестко прикрепленного к оси 3. На оси 25 вращения установлен рычаг 26, связанный с пружиной 27. На рычаге 26 расположен ролик 28. Конец рычага 26 при
с помощи шарнира 29 связан с выдвижным фиксатором 30, установленным в направляющей втулке 31, а на мачте 1 установлен упор 32, предназначенный для взаимодействия с фиксатором 30.
Механизм работает следующим образом.
0Каретка 2 подъемника при движении
вверх наезжает роликом 6 на соответствующую требуемому этажу линейку 8. Поскольку ролик 6 закреплен на рычаге 5, жестко связанном с вилкой 4, то последняя при наезде ролика 6 на линейку 8 поворачивается. При повороте вилки 4 при помощи тяги 23 поворачиваются пластина 17 и втулка 14. Вместе с ними поворачивается собачка 19 на угол, ограниченный упорами 20 и 21. Поскольку собачка 19
о взаимодействует с храповиком 15, последний также поворачивается вместе с жестко связанным кулачком 16 с волнообразным профилем. К кулачку 16 всегда прижат ролик 28, установленный на подпружиненном рычаге 26. Поэтому при вращении кулачка 16
5 ролик 28 попадает во впадину кулачка 16. За счет пружины 27 рычаг 26 перемещает связанный с шарниром 29 фиксатор 30 вдоль направляющей втулки 31. располагаясь при этом над упором 32, установленным на мачте 1. При повороте вилки 4
5
происходит также натяжение сигнального каната 10, который связан с рычагом 11. При подъеме последнего срабатывает конечный выключатель 12 и двигатель лебедки отключается на подъем. Далее происходит выдвижение грузонесущего органа. Для обес печения указанного выдвижения лебедку включают на спуск. Каретка 2 немного опускается так, что ролик 6 сходит с линейки 8. Вилка 4, втулка 14 и пластина 17 под действием пружины 22Ч возвращаются в исходное положение, а каретка 2, опускаясь, садится фиксатором 30 на упор 32. При дальнейшем ослаблении грузового каната за счет усилия противовеса грузоне- сущий орган выдвигается в проем здания. Обратный ход грузонесущего органа осуществляется натяжением грузового каната, за счет которого грузонесущий орган перемещается в исходное положение (выходит из проема). После этого при дальнейшем натяжении грузового каната каретка 2 поднимается выше упора 32, ролик 6 вновь наезжает на линейку 8. Далее происходит поворот вилки 4, втулки 14 при помощи тяги 23, храповика 15 и кулачка 16. Последний отжимает ролик 28 и обеспечивает перемещение рычага 26. Шарнирно связанный с ним фиксатор 30 вдвигается. После этого рычаг 11 за счет натяжения сигнального каната 10 поднимается и отключает двигатель лебедки на подъем. После этого включают лебедку и опускают каретку.
Формула изобретения Механизм стопорения грузовой каретки строительного подъемника, содержащий ус0
тановленную на каретке поворотную вилку с жестко закрепленными на ней пальцами и рычагом с роликом на конце, выполненным с возможностью взаимодействия с закрепленной на мачте подъемника выключающей линейкой, при этом пальцы установлены с возможностью взаимодействия с сигнальным тросом, прикрепленным одним концом к верхней части мачты, а другим - к плечу рычага, установленного на оси его вращения в нижней части мачты, и взаимодействующим с конечным выключателем, включенным в цепь питания электродвигателя подъемника, отличающийся тем, что, с целью снижения трудозатрат и обеспечения безопасности, он снабжен механическим приводом выдвижного фиксатора перемещения каретки, включающим в себя установленную на каретке ось с надетой на нее втулкой с жестко закрепленной на ней пластиной, связанной гибкой тягой с поворотной вилкой и снабженной осью с поворотной относительно нее собачкой, поворот которой ограничен упорами, выполненными на каретке, на оси установлен храповик, выполненный с возможностью вза5 имодействия с собачкой, и профилированный кулачок, жестко соединенный с храповиком и кинематически связанный посредством передачи с выдвижным фиксатором, выполненной в виде подпружиненного относительно каретки, снабженного роликом ры0 чага, один конец которого шарнирно связан с кареткой, а другой - с выдвижным фиксатором, при этом ролик установлен в контакте с поверхностью профилированного кулачка, а на мачте установлен упор перемещения каретки.
0
25
ВиЭБ

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм стопорения грузовой каретки строительного подъемника | 1988 |
|
SU1557045A1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Устройство для стопорения каретки на мачте строительного подъемника | 1990 |
|
SU1801916A1 |
| Строительный подъемник | 1988 |
|
SU1588677A1 |
| Строительный подъемник | 1988 |
|
SU1602843A1 |
| Устройство для адресования грузовой каретки строительного подъемника | 1988 |
|
SU1548150A1 |
| Строительный подъемник | 1988 |
|
SU1546403A1 |
| Строительный подъемник | 1990 |
|
SU1765092A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |


Изобретение относится к подъемно - транспортному машиностроению, в частности к механизму стопорения грузовой каретки строительного подъемника. Целью изобретения является повышение надежности. Механизм стопорения грузовой каретки 2 содержит смонтированный на ней фиксатор 30, установленный с возможностью взаимодействия с упором 32, установленным на мачте 1. На каретке 2 на оси находится поворотная вилка 4, к которой жестко прикреплен рычаг 5, снабженный роликом 6, взаимодействующим с установленными на мачте линейками 8. Вилка 4 снабжена пальцами 9, через которые проходит сигнальный канат 10, прикрепленный одним концом к верхней части мачты 1, а другим - к расположенному в основании мачты подпружиненному рычагу, взаимодействующему с конечным выключателем. На оси, жестко установленной на грузовой каретке 2, смонтирована вращающаяся втулка 14 с жестко прикрепленной к ней пластиной 17, связанной гибкой тягой 23 с поворотной вилкой 4 и снабженной жестко прикрепленной к этой пластине осью с расположенной на ней собачкой 19, храповик 15, взаимодействующий с собачкой, и жестко связанный с храповиком профилированный кулачок 16. С последним взаимодействует ролик 28, расположенный на подпружиненном рычаге 26, установленном на грузовой каретке 2 и шарнирно связанном с выдвижным фиксатором 30, перемещающимся в направляющей втулке 31. Угол поворота собачки 19 ограничен установленными на грузовой каретке 2 упорами 20,21. 7 ил.
Фиг 2
Фиг.Ч
Фиг 5
18
23
Фие.6
/з
Фие.7
| Строительный подъемник | 1985 |
|
SU1303533A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
