Известны устройства для настроечных перемещений деревообрабатывающих силовых головок. Однако такие головки не имеют дистанционного управления.
В описываемом устройстве для дистанционного управления головками в станках и линиях применен управляемый контактным приспособлепием следящий привод с обратной связью через безлюфтовую реечную передачу, обеспечивающую перемещения головок с точностью, не зависящей от величины мертвого хода кинематической цепи привода настройки.
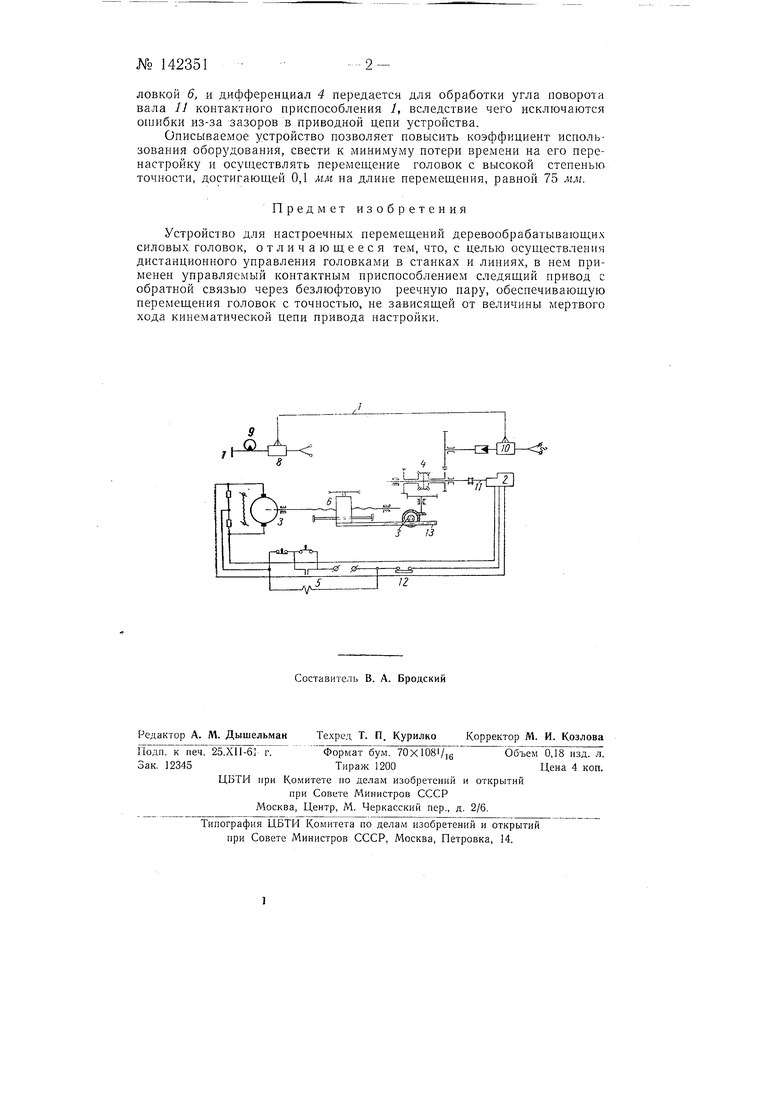
На чертеже изображена схема устройства.
Устройство для настроечных перемещений деревообрабатывающих силовых головок состоит из следящего привода 1, контактного приспособления 2, управляющего приводом /, безлюфтовой реечной пары 5, дифференциала 4 и защитного реле 5.
Для настроечного перемещения деревообрабатывающей силовой головки 6 на размер очередной партии заготовок путем вращения рукоятки 7 сельси}1-датчик 8 устанавливается по щкале 9 на необходимый размер. Се.льсип-приемник /О, отрабатывая заданный сельсином-датчиком 8 угол, вращает через дифференциал 4 входной вал 11 приспособления 2, вследствие чего происходит размыкание одной из пар его контактов в зависимости от направления перемещения головки 6. Таким образом, устройство подготавливается к перенастройке головки б на новый размер. Исполнительная команда к настроечному перемещению подается конечным выключателем 12 сразу же после окончания обработки предыдущей заготовки.
Обратная связь в устройстве осуществляется через реечную пару 5. Перемещение головки 6 через нее благодаря рейке 13, соединенной с головкой 6, и дифференциал 4 передается для обработки угла поворота вала и контактного приспособления /, вследствие чего исключаются ошибки из-за зазоров в приводной цепи устройства.
Описываемое устройство позволяет повысить коэффициент использования оборудования, свести к минимуму потери времени на его перенастройку и осуществлять перемещение головок с высокой степенью точности, достигающей 0,1 мм па длине перемещения, равной 75 мм.
Предмет изобретения
Устройство для настроечных перемещений деревообрабатывающих силовых головок, отличающееся тем, что, с целью осуществления дистанционного управления головками в станках и линиях, в нем применен управляемый контактным приспособлением следящий привод с обратной связью через безлюфтовую реечную пару, обеспечивающую перемещения головок с точностью, не зависящей от величины мертвого хода кинематической цепи привода настройки.