(Л
с
1C
со со со
О5
Изобретение относится к машиностроению и может быть использовано в системах управления.
Цель изобретения - улучшение эксп луатационных характеристик. На фиг.1 схематически изображен I двухкоординатный преобразователь; на
фиг.2 - вид А на фиг.1; на фиг.3 - j вид Б на фиг.1.
Двухкоординатный преобразователь содержит корпус 1, две установленны в нем поворотные дугообразные рамы 2, 3 с продольными пазами 4, размещенные во взаимно перпендикулярных плоскостях и связанные с подвижными элементами 5 преобразователей 6 угловых перемещений, установленных на корпусе 1, и рукоятку 7 управления, сопряженную с продольными пазами 4 дугообразных рам 2, 3, выполненную в виде жесткого стержня закрепленного шарнирно средней частью 8 в корпусе . Конец стержня 7, сопряженный I с продольными пазами 4 дугообразных I рам 2, 3, имеет диаметр D, меньшийо чем ширина 1 паза, противоположный конец стержня 7 подпружинен к корпу icy 1 во взаимно перпендикулярных .пло- iCKocTHX, а дугообразные рамы 2j, 3 подпружинены к корпусу 1 во взаимно противоположных направлениях, : Рукоятка 7 подпружинена к корпусу |1 пружинами 9s 10 и 11 $ 12 во взаимно перпендикулярных плоскостях, а ду- ;гообразные рамы 2, 3 - пружинами 13, 14 во взаимно противоположных направ- ;лениях.
Преобразователь работает- следующим образом.
Под действием управляющего усилия рукоятка 7 входит в соприкосновение с дугообразными рамами 2, 3 и придает им угловые .перемещения и, соответст
венно, перемещения жестко связанным с ними подвижным элементам 5 преобразователей 6, изменяя выходную величину электрического сигнала управления. При отсутствии управляющего воздействия рукоятка 7 под действием пружин 9, 10, 115 12 занимает исходное положение. Под действием пружин 13, 14 дугообразные рамы 2 и 3 занимают положение, при котором между ними и рукояткой 7 образуются зазоры, в которых возможно перемещение конца стержня 7 под действием внешних факторов (например, ускорения движения машины, вибрации), не приводящее к перемещениям дугообразных рам 2„и 3.
Формула изобретения
Двухкоординатный преобразователь, содержащий корпус, две установленные в нем поворотные дугообразные рамы с продольными пазами, размещенные во азаимно перпендикулярных плоскостях и связанные с подвижными элементами преобразователей угловых перемещений, установленных на корпусе, и рукоятку управления, сопряженную с продольными пазами дугообразных рам, выполненную в виде жесткого стержня, закрепленного шарнирно средней частью в корпусе, отличающийся тем, что, с целью улучшения эксплуатахдаонных характеристик, конец стержня, сопряженный с продольными пазами дугообразных рам, имеет диаметр меньший, чем ширина паза, противоположный конец стержня подпружинен к к орпусу во взаимно перпендикулярных плоскостях, а дугообразные рамы подпружинены к корпусу во взаимно противоположных направлениях.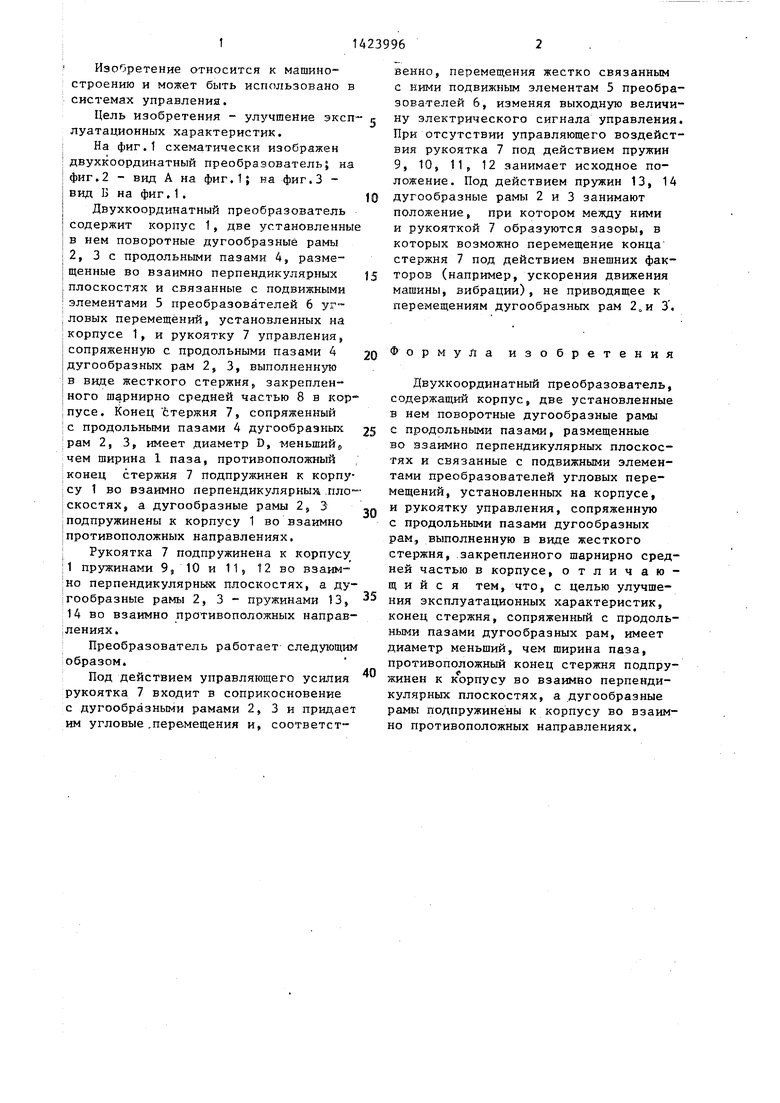
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| ПЕРЕКЛЮЧАТЕЛЬ | 1993 |
|
RU2040060C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Устройство управления | 1985 |
|
SU1265752A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| ЗАМОК ПРОТИВОУГОННОГО УСТРОЙСТВА | 2008 |
|
RU2377147C1 |
| Устройство управления приводом сельскохозяйственной машины | 1990 |
|
SU1797779A1 |
| Устройство для дистанционного управления | 1990 |
|
SU1770957A2 |

Изобретение относится к области машиностроения и может быть испол зовано в системах управления. Цель изобретения - улучшение эксплуатационных характеристик. Двухкоординатный преобразователь содержит корпус 1, поворотные дугообразные рамь (ПДР) , 2,3с пазами 4, преобразователи угловых перемещений 6, рукоятку управления (РУ) 7.. Улучшение эксплуатационных характеристик обеспечивается тем, что конец РУ 7, сопряженный с пазами 4 ПДР 2 и 3, имеет диаметр меньший, чем ширина паза 4, противоположный конец РУ 7 подпружинен к корпусу 1, а ПДР 2, 3 подпружинены к корпусу во взаимно противоположных направлениях. 3 ил. с 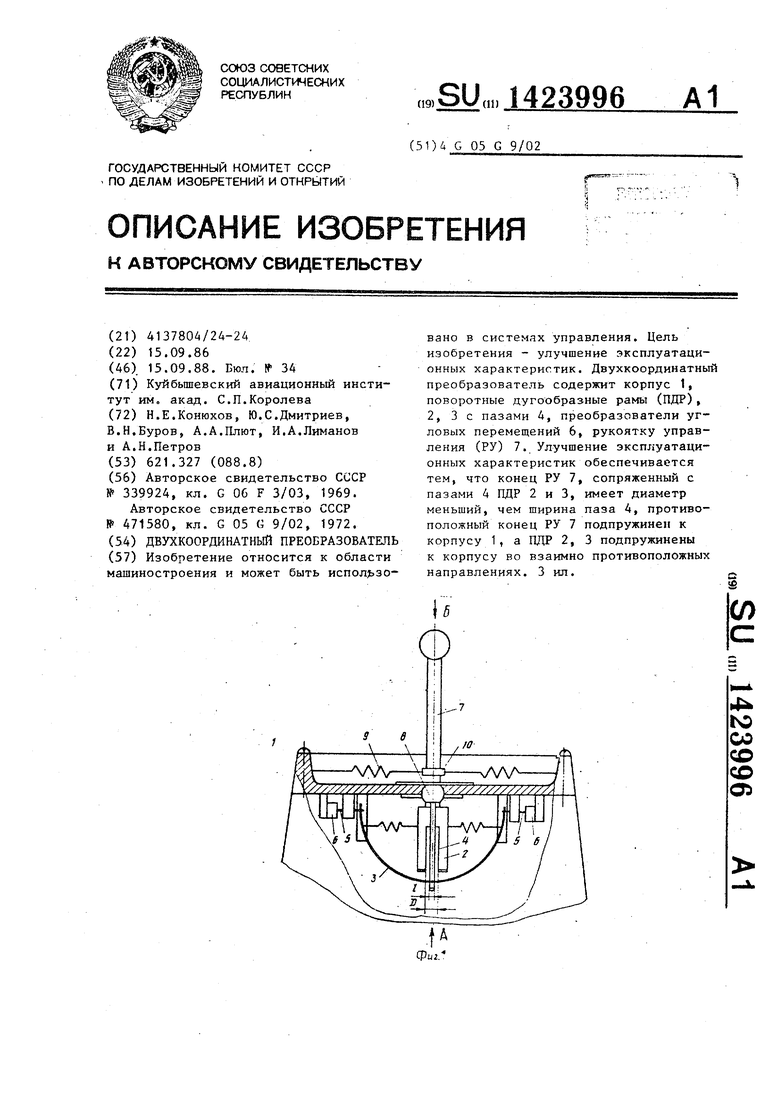
| УСТРОЙСТВО для ВВОДА ИНФОРМАЦИИ | 0 |
|
SU339924A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Механизм управления насосом | 1972 |
|
SU471580A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
