Изобретение относится к устройствам автоматизации прокатного производства и может быть использовано для управления разгрузочными устройствами полосовых, ленточных станов и агрегатов с порулонной прокаткой или обработкой полос и лент.
Целью изобретения является исключение смятия торцов полос и лент, смотанных в рулоны, и повьпление качества полос и лент.
На чертеже приведена функциональная схема системы.
Рулоны 1 по oKoi-гчании обработки разгружаются с барабана моталки 2 и передаются на хобот накопителя 3. Разгрузка рулонов 1 осуществляется с помощью передаточной тележки 4, на которой смонтирован подъемный стол 5, Тележка 4 имеет привод 6 перемещения с блоком 7 управления и привод 8 подъема стола с блоком 9 управления. Накопитель 3 имеет привод 10 поворота с блоком i управления.
Наличие рулона 1 на барабане мотаки 2 контролируется датчиком 12 наличия металла, наличие рулона в начальной части хобота накопителя 3 фиксируется да чиком i3 наличия металла. Нахождение рулона 1 на подъемном столе 5 передаточной тележки 4 фиксируется датчиком 4 наличия металла.
Командный блок 15 соединен с входом блока 16 вертикального перемещения рулона, который своими выходами соединен с входами блока 9 управления подъема стола 5с
Блок 17 горизонтального перемещения рулона своими выходами соединен с входами блока 7 управления перемещением тапежки 4, Блок 18 задания перемещен ня соединен своими входами с двумя выходами датчика 19 перемещения тележки, а выходом - с блоком 17 горизонтального перемещения рулона, С датчиком 13 наличия металла соединен блок 20 первой разгрузки. Н одном выходе датчика 9 сш налы появляются при перемещении тележки 4 в одном направлении, а на втором выходе при перемещении тележки 4 в противоположном направлении.
Блок 16 вертикального перемещения
С третьим входом реги динены последовательно с инвертор 39, вход которо с датчиком 12 наличия ме И 40, второй вход которо прямым выходом тригтера
рулона содержит триггеры 21 и 22, схе--.
му И 23 и схему 24 задержки. Выход 17, и схема 41 задержки.
4248952 ,
му и 23, а выход триггера 22 - с втоto
15
20
25
30
Q
рым входом блока 9 управления подъемом стола непосредственно. Первый вход триггера 21 соединен с командным блоком 15, а второй вход - с выходом схемы 24 задержки.
Блок 17 горизонтального перемещения рулона содержит последовательно соединенные схему И 25, триггер 26, прямой выход которого соединен с первым входом блока 7 управления перемещением тележки, и схему И 27, выход которой соединен с вторым входом блока 7 управления перемещения тележки С вторым входом схемы И 27 соединен выход инвертора 28, вход которого соединен с входом схемы И 25 и входом схемы 24 задержки блока 16 соединен с датчиком 14 наличия металла. Второй вход схемы И 25 соединен с инверсным выходом триггера 21 блока 16„
Блок 18 задания перемещения содержит последовательно соединенные счетчик 29, два входа которого соединены соответственно с двумя выходами датчика 19 перемещения тележки, схему 30 совпадений, схему 31 задержки, накапливающий сумматор 32, дискриминатор 33, схему И 34, выход которой соединен с входом блока 11 управления приводом 10 поворота накопителя 3.
С выходом счетчика 29 соединены последовательно соединенные регистр 35 и комбинационный сумматор 36,,выход которого соединен с вторым входом схемы 30 совпадений. Второй вход сумматора 36 соединен с выходом накапливающего сумматора 32. Выход регистра 35 соединен также с входом множителя 37, выход которого соединен с входом комбинационного сумматора 38 и вторым входом накапливающего сумма- .г тора 3.2« Выход сумматора 38 соединен с вторым входом дискриминатора 33. Второй вход схемы И 34 соединен с выходом инвертора 28 блока 17 горизонтального перемещения рулона.
С третьим входом регистра-35 соединены последовательно соединенные инвертор 39, вход которого соединен с датчиком 12 наличия металла, схема И 40, второй вход которой соединен с прямым выходом тригтера 26 блока
35
0
.
17, и схема 41 задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема съемной тележки моталки | 1981 |
|
SU988403A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1981 |
|
SU942114A1 |
| Устройство автоматического управления приводами агрегата при наборе заданной массы полосы на моталке | 1984 |
|
SU1186304A1 |
| Устройство для управления моталкой прокатного стана | 1981 |
|
SU984533A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1982 |
|
SU1068957A2 |
| Устройство управления скоростными режимами | 1976 |
|
SU655445A1 |
| Устройство для точного останова моталки листового стана | 1985 |
|
SU1299637A1 |
| Устройство для управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1721420A1 |
| Система управления реверсивным станом холодной прокатки | 1983 |
|
SU1156755A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |

Изобретение относится к устройствам автоматизации прокатного производства и может быть использовано, для управления разгрузочными устройствами полосовых, ленточных станов и агрегатов с порулонной прокаткой и обработкой полос и лент. Цель - исключение смятия торцов полос и лент, смотанных в рулоны, в процессе разгрузки рулонов и повышение качества готовых полос и лент. Цель достигает-, ся тем, что система обеспечивает согласованное управление подъемом стола передаточной тележки, перемещением последней с рулоном к накопителю, на-, вепшванием рулона на хобот накопителя и возвращением стола и передаточ- ной тележки в исходное состояние, при i котором система готова к разгрузке следующего рулона. Система учитьша- ет наличие рулонов на хоботе накопителя. 4 з,п ф-лы, 1 ил. (Л
триггера 21 соединен с первым блока 9 управления подъемом стола и первым входом триггера 22 через схеБлок 20 первой разгрузки содержит последовательно соединенные инвертор 42, вход которого соединен с датчиком 13 наличия металла, и схему ИЛИ 43, выход которой соединен с вторым вхйдом схемы И 23 блока 16, С вторым входом схемы ИЛИ 43 соединен прямой выход триггера 44, инверсный выход которого соединен со схемой 45 сигнализации через схему И 46 и схему 47 задержки. Второй и третий входы схемы И 46 соединены с выходами соответственно прямым триггера 21 и инверсным схемы И 23 блока 16.
Вход сброса триггера 44 вместе с входами сброса регистра 35 и сумматора 32 накапливающего блока 18 присоединен к второму выходу блока 11 управления приводом поворота накопителя.
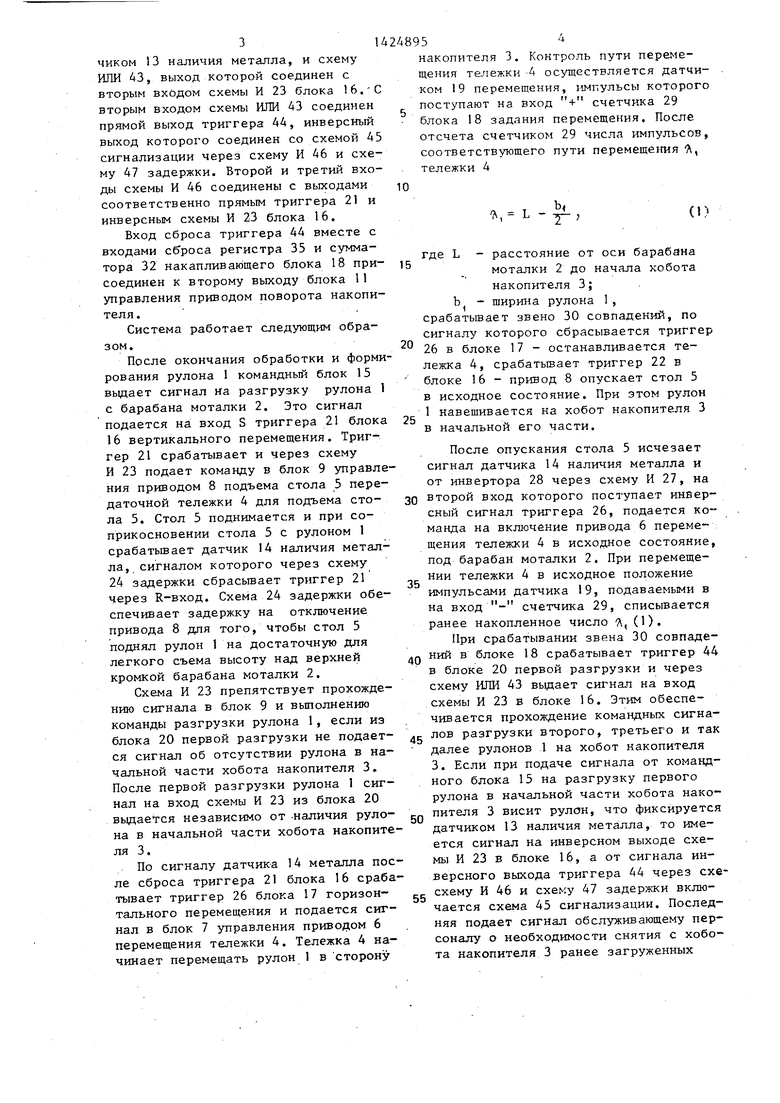
Система работает следующим образом.
После окончания обработки и формирования рулона 1 командный блок 15 выдает сигнал на разгрузку рулона 1 с барабана моталки 2. Это сигнал подается на вход S триггера 21 блока 16 вертикального перемещения. Триггер 21 срабатывает и через схему И 23 подает команду в блок 9 управления приводом 8 подъема стола 5 передаточной тележки 4 для подъема стола 5. Стол 5 поднимается и при соприкосновении стола 5 с рулоном 1 срабатьшает датчик 14 наличия металла, сигналом которого через схему 24 задержки сбрасьшает триггер 21 через R-вход. Схема 24 задержки обеспечивает задержку на отключение привода 8 для того, чтобы стол 5 поднял рулон 1 на достаточную для легкого съема высоту над верхней кромкой барабана моталки 2.
Схема И 23 препятствует прохождению сигнала в блок 9 и вьшолнению команды разгрузки рулона 1, если из блока 20 первой разгрузки не подается сигнал об отсутствии рулона в начальной части хобота накопителя 3, После первой разгрузки рулона 1 сигнал на вход схемы И 23 из блока 20 выдается независимо от -наличия рулона в начальной части хобота накопителя 3.
По сигналу датчика 14 металла после сброса триггера 21 блока 16 срабатывает триггер 26 блока 17 горизонтального перемещения и подается сигнал в блок 7 управления приводом 6 перемещения тележки 4. Тележка 4 начинает перемещать рулон 1 в сторону
накопителя 3. Контроль пути перемещения те-аежки А осуществляется датчиком 19 перемещения, импульсы которого поступают на вход + счетчика 29 блока 18 задания перемещения. После отсчета счетчиком 29 числа импульсов, соответствующего пути перемеще1гия Л, тележки 4
, L-f.
(1)
где L - расстояние от оси барабана
моталки 2 до начала хобота накопителя 3; Ь - ширина рулона 1, срабатывает звено 30 совпадений, по сигналу которого сбрасывается триггер 26 в блоке 17 - останавливается тележка 4, срабатьшает триггер 22 в блоке 16 - привод 8 опускает стол 5 в исходное состояние. При этом рулон 1 навещивается на хобот накопителя 3
в начальной его части.
5
0
После опускания стола 5 исчезает сигнал датчика 14 наличия металла и от инвертора 28 через схему И 27, на
0 второй вход которого поступает инверсный сигнал триггера 26, подается команда на включение привода 6 перемещения тележки 4 в исходное состояние, под барабан моталки 2. При перемещении тележки 4 в исходное положение импульсами датчика 19, подаваемыми в на вход - счетчика 29, списывается ранее накопленное число Л, (1).
При срабатывании звена 30 совпадеQ НИИ в блоке 18 срабатывает триггер 44 в блоке 20 первой разгрузки и через схему ИЛИ 43 выдает сигнал на вход схемы И 23 в блоке 16. Этим обеспечивается прохоясдение командных сигнас лов разгрузки второго, третьего и так далее рулонов 1 на хобот накопителя 3. Если при подаче сигнала от командного блока 15 на разгрузку первого рулона в начальной части хобота накопителя 3 висит рулон, что фиксируется датчиком 13 наличия металла, то имеется сигнал на инверсном выходе схемы И 23 в блоке 16, а от сигнала инверсного выхода триггера 44 через схеg схему И 46 и схему 47 задержки включается схема 45 сигнализации. Последняя подает сигнал обслуживающему персоналу о необходимости снятия с хобота накопителя 3 ранее загруженных
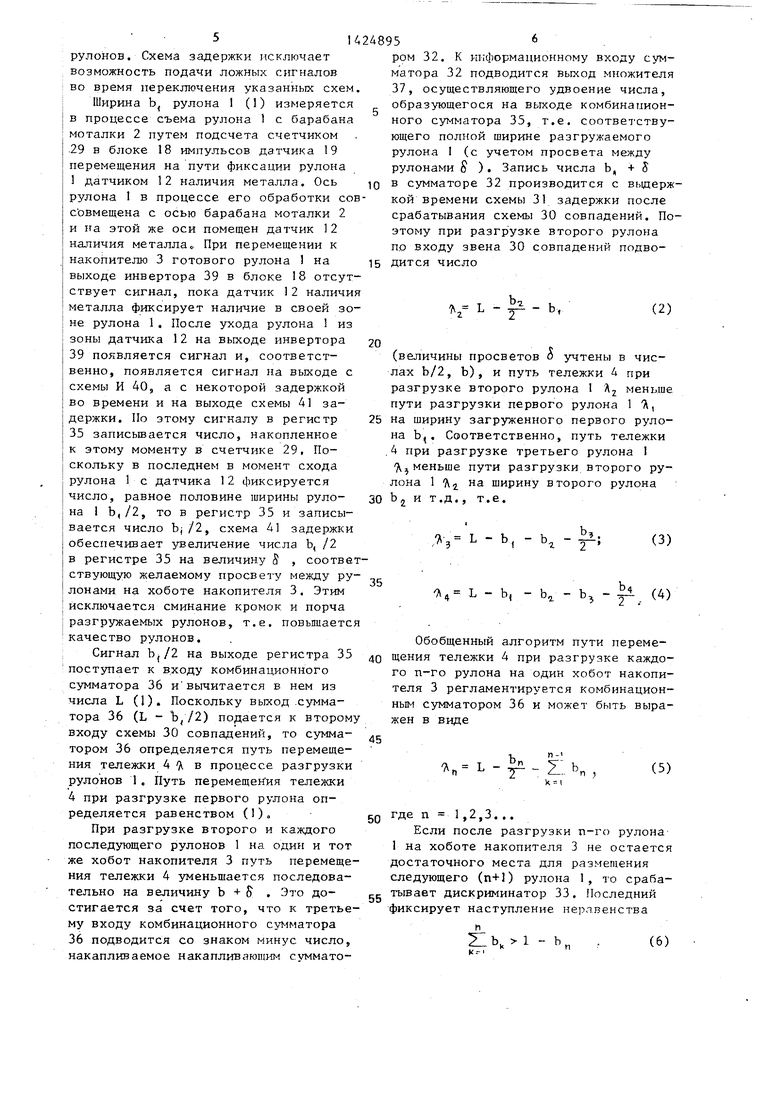
рулонов. Схема задержки исключает возможность подачи ложных сигналов во время переключения указанных схем. Ширина bj рулона 1 (1) измеряется в процессе съема рулона 1 с барабана моталки 2 путем подсчета счетчиком 29 в блоке 18 импульсов датчика 19 перемещения на пути фиксации рулона 1 датчиком 12 наличия металла. Ось рулона 1 в процессе его обработки сов совмещена с осью барабана моталки 2 и на этой же оси помещен датчик 12 наличия металла При перемещении к накопителю 3 готового рулона на выходе инвертора 39 в блоке 18 отсутствует сигнал, пока датчик 12 наличия металла фиксирует наличие в своей зоне рулона . После ухода рулона из зоны датчика 12 на выходе инвертора 39 появляется сигнал и, соответственно, появляется сигнал на выходе с схемы И 40, ас некоторой задержкой во времени и на выходе схемы 41 задержки. По этому сигналу в регистр
35записьшается число, накопленное к этому моменту в счетчике 29. Поскольку в последнем в момент схода рулона 1 с датчика 12 фиксируется число, равное половине ширины рулона 1 Ь,/2, то в регистр 35 и записывается число bj/2, схема 41 задержки обеспечивает увеличение числа Ъ, /2
в регистре 35 на величину 8 , соответствующую желаемому просвету между рулонами на хоботе накопителя 3. Этим
исключается сминание кромок и порча разгружаемых рулонов, т.е. повышается качество рулонов.
Сигнал bj/2 на выходе регистра 35
поступает к входу комбинационного сумматора 36 и вычитается в нем из числа L (1). Поскольку выход .сумматора 36 (L - Ъ,72) подается к второму входу схемы 30 совпадений, то сумматором 36 определяется путь перемещения тележки 4 в процессе разгрузки рулонов 1, Путь перемещения тележки 4 при разгрузке первого рулона определяется равенством (1).
При разгрузке второго и каждого последующего рулонов 1 на один и тот же хобот накопителя 3 путь перемещения тележки 4 уменьшается последовательно на величину Ь + 5 . Это достигается за счет того, что к третьему входу комбинационного сумматора
36подводится со знаком минус число, накапливаемое накапливающим суммато48956
ром 32. К К1;формационному входу сумматора 32 подводится выход множителя 37, осуществляющего удвоение числа, образующегося на выходе комбинационного сумматора 35, т.е. соответствующего полной ширине разгружаемого рулона I (с учетом просвета между рулонами S ). Запись числа Ь + J в сумматоре 32 производится с выдержкой времени схемы 31 задержки после срабатывания схемы 30 совпадений. Поэтому при разгрузке второго рулона по входу звена 30 совпадений подводится число
10
15
7 L Т
- ь,
(2)
20
(величины просветов о учтены в числах Ь/2, Ь), и путь тележки 4 при разгрузке второго рулона 1 А меньше пути разгрузки первого рулона 1 А,
25 на ширину загруженного первого рулона Ь,. Соответственно, путь тележки .4 при разгрузке третьего рулона I , меньше пути разгрузки второго рулона 1 Aj на ширину второго рулона
30 Ь„ и т.д., т.е.
. L - Ь, Ь,. - -.
(3)
L - Ь,
- Ь, - Ь, .(4)
Обобщенный алгоритм пути переме- щения тележки 4 при разгрузке каждого п-го рулона на один хобот накопителя 3 регламентируется комбинационным сумматором 36 и может быть выражен в виде
Ъп Т
п ,,
k i
(5)
50
где п 1,2,3...
Если после разгрузки п-го рулона 1 на хоботе накопителя 3 не остается достаточного места для размещения следующего (п+1) рулона 1, то сраба- gg тывает дискриминатор 33. Последний фиксирует наступление неравенства
К-1
Ь, 1 (6)
где 1 - размер хобота накопителя, h
Zlb число, равное сумме ширины п рулонов и накопленное в накапливающем сумматоре 32 после разгрузки п-го рулона, ширина которого равна Ь„. При срабатывании дискриминатора 33, т.е. при наступлении неравенста (6), исчезает разрешающий сигнал а входе схемы И 26. в блоке 17 горизонтального перем ения, что препятствует про хождению команд на перемеение тележки 4 для разгрузки рулонов. Одновременно подается команда через схему И ЗД на вход блока 11 управления поворотом накопителя 3,
При этом привод 10 поворачивает , накопитель 3, уводит из зоны разгрузки рулонов 1 загруженный хобот и перемещает в эту зону свободный хобот, предварительно освобожденный от ру- лонов цеховыми подъемно-транспортными средствами. Схема И ЗА разрешает поворот хобота накопителя 3, если стол 5 тележки 4 опущен, т.е. если датчик 14 металла не касается рулона. Затем цикл повторяется.
Таким образом, благодаря дополнению системы тремя датчиками наличия металла и датчиком перемещения тележки, блоками вертикального и горизонтального перемещений, блоком задания перемещения, блоком первой разгрузки обеспечивается разгрузка обработанных рулонов без смятия их торцов, т.е. повьпиается качество рулонов.
Формула изобретения 40
14248958
входом блока задания перемещения,
третий с с входом блока первой разгрузки, датчик перемещения тележки соединен с входом блока задания перемещения , командный блок соединен с входом блока вертикального перемещения .
управления подъема стола и первым входом второго триггера через схему И, а выход второго триггера соединен с вторым входом блока управления подъема стола непосредственно, первый
вход первого триггера соединен с командным блоком, а второй вход первого триггера соединен с выходом схемы задержки.
металла, второй вход первой схемы И
соединен с инверсным выходом первог о триггера блока вертикального перемещения рулона.
перемещения содержит последовательно соединенные счетчик, два входа которого соединены соответственно с двумя выходами датчика .перемешения тележки, схему совпадений, схему задержки, сумматор накапливающий, дискриминатор, схему И, выход которой соединен с. входом блока управления приводом поворота накопителя,
| Авторское свидетельство СССР № 227281, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
