Изобретение относится к машиностроению, в частности к конструкции приводимых агрегатов для моталок листопрокатного оборудования.
Целью изобретения является повыше- ние точности останова моталки за счет исключения влияния пробуксовки рулона относительно барабана.
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - схема вычислительного устройства.
Устройство содержит датчик 1 наличия полосы и датчик 2 сближения полосы, тя- нуш,ие 3 и формуюш.ий 4 ролики, барабан моталки 5 с полосой 6, датчики 7 и 8 угла поворота, вычислительное устройство 9, блок 10 контроля скорости полосы, триггер 11, элемент И 12, счетчик 13, схему 14 сравнения, арифметическое устройство 15.
Датчик 1 наличия полосы и датчик 2 положения полосы установлены перед моталкой на определенном расстоянии от тяну- ш,их роликов 3. Датчик 2 устанавливается непосредственно перед тянущими роликами 3 как можно ближе к их оси. Датчик 1 устанавливается на фиксированном расстоянии fi от датчика 2.
Расстояние Ь выбирается несколько большим пути, проходимого задним концом полосы при торможении моталки с рулоном в конце смотки с максимальной рабочей скорости до ползучей. С формирующим роликом 4 и барабаном 5 моталки кинематически соединены датчики 7 и 8 угла поворо- та формирующего ролика 4 и барабана 5 соответственно.
Выходы датчиков 2 и 8 подключены к входам вычислительного устройства 9. Выход датчика 7 связан с входами вычислительного устройства 9 и блока 10 измере- ния скорости полосы.
Выход датчика 1 наличия полосы подключен к входу триггера, выход которого соединен с входом элемента И 12. Второй вход элемента и 12 подключен к входу датчика 7 угла поворота формующего ролика 4, а выход элемента И 12 соединен с входом счетчика 13, выход которого соединен с первым входом схемы 14 сравнения, второй вход которой связан с выходом арифметического устройства 15. Первый вход арифметического устройства 15 подключен к выходу блока 10 измерения скорости полосы, второй к выходу триггера 11. Выходы схемы сравнения 14 и вычислительного устройства 9 подключены в схему управления приводом моталки (сигналы «Торможение и «Останов).
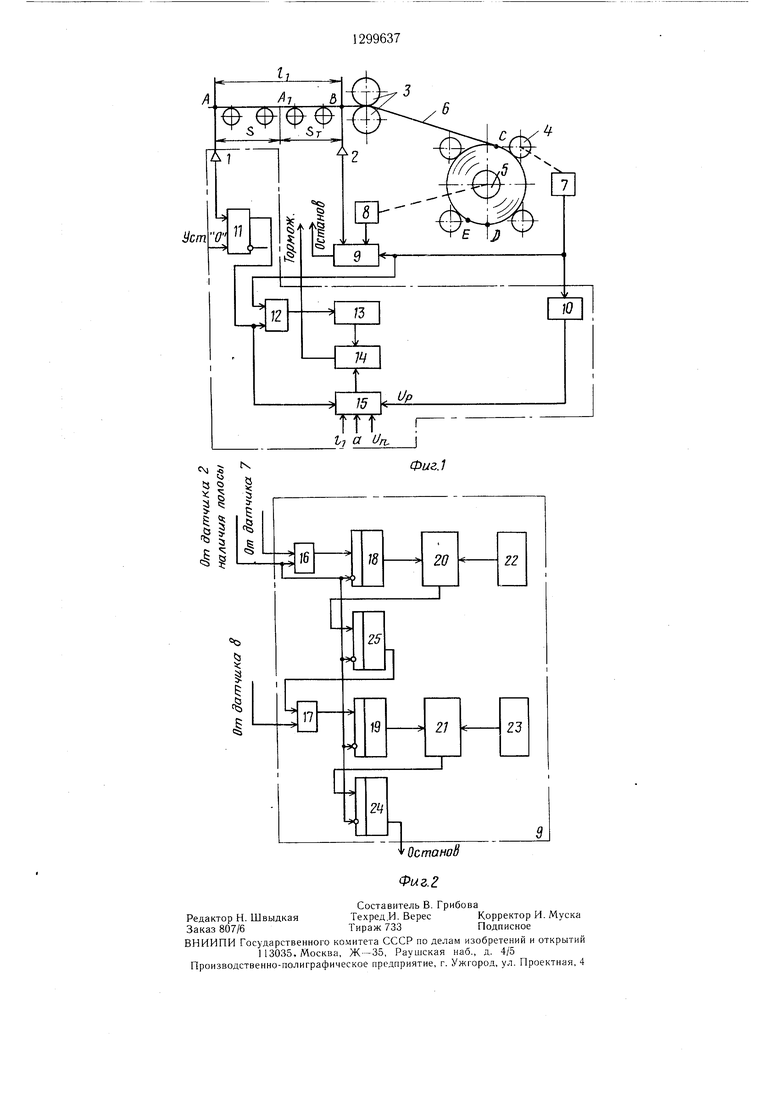
Вычислительное устройство 9 (фиг. 2) состоит из элементов И 16, и 17, счетчиков 18 и 19, схем 20 и 21 сравнения, шифраторов 22, 23, триггеров 24 и 25.
Устройство работает следующим образом.
При смотке полосы в рулон, пока задний ее конец не подошел к точке А,
схема находится в исходном положении. Сигналы на выходах датчиков 1 и 2 отсутствуют. Датчики 7, 8 угла поворота формирующего ролика 4 и барабана 5 моталки преобразуют угол поворота в последовательность импульсов, частота которых пропорциональна скорости вращения формирующего ролика и барабана. Эти импульсы поступают на входы вычислительного устройства 9 и блока 10 контроля скорости полосы.
Вычислительное устройство 9 находится при этом в исходном состоянии. На выходе блока 10 имеется число, выражающее линейную рабочую скорость движения полосы VP, которая непрерывно поступает на вход арифметического устройства 15.
Арифметическое устройство 15 находится в исходном положении. На выходе арифметического устройства информация отсутствует.
Триггер 11 находится в состоянии «О, сигнал на его прямом выходе отсутствует. Импульсы датчика 7 не проходят через схему И 12 на вход счетчика 13 пути, пройденного полосой. Счетчик 13 сброщен в «О. На выходе схемы 14 сравнения сигнал отсутствует. В момент прихода заднего конца полосы в точку А на выходе датчика 1 появляется сигнал и триггер 11 перебрасывается в состояние «Ь. На выходе триггера появляется сигнал, который одновременно поступает на входы схемы И 12 и арифметического устройства 15. Арифметическое устройство 15 при этом запускается и производит вычисление величины S, т.е. пути, который должен пройти задний конец полосы от точки А до точки AI, в которой подается команда на торможение моталки. Величина S рассчитывается таким образом, чтобы в момент попадания заднего конца полосы в точку В скорость моталки снизилась с рабочей скорости до заданной ползучей. Вычисление значения производится по формуле
,,2.,i
S 1, - ST 1, - VP
fltCL
где VP - рабочая скорость полосы в момент прохождения ее колцом точки А;
Vn - задняя ползучая скорость полосы;
ST - путь торможения с Vp до Vn; а - замедление полосы в процессе торможения.
Величины Vn и а являются постоянными, рассчитываются заранее и вводятся в арифметическое устройство 15 как константы.
Значение S с выхода арифметического устройства 15 поступает на вход схемы 14 сравнения. В момент переброса триггера 11 в состояние «Ь импульсы датчика 7 угла поворота формирующего ролика 5 начинают через схему И 12 поступать на вход счетчика пути 13. В тот момент, когда в счетчике 13 насчитывается число импульсов, соответствующее расчетному значению S, на выходе схемы 14 сравнения появляется сигнал.
который поступает в схему управления приводом моталки, давая команду на торможение моталки с рабочей скорости до ползучести.
В этот момент задний конец полосы находится в точке А. За время движения заднего конца полосы от точки А до точки В скорость моталки снижается до заданной ползучей и замедление барабана прекращается. Если в процессе торможения моталки имела место пробуксовка рулона на барабана, то к моменту прохода конца полосы в точку В пробуксовка полностью прекращается.
На выходе датчика 2 появляется сигнал и вычислительное устройство 9 начинает отсчитывать путь, проходимый задним концом полосы от точки в до точки с по углу поворота формирующего ролика 4. В момент попадания заднего конца полосы в точку С вычислительное устройство 9 начинает следить за перемещением конца из точки С в точку D по углу поворота барабана моталки. В момент попадания заднего конца полосы в точку D вычислительное устройство выдает команду в привод моталки на останов барабана. Барабан с рулоном соверщает выбег по инерции и останавливается. Задний конец полосы при этом оказывается в заданной точке Е.
Вычислительное устройство 9.(режим останова) работает следующим образом.
При фиксировании соответствующим датчиком заднего конца полосы на его выходе появляется сигнал. Импульсы датчика 7 угла поворота формирующего ролика 4 через элемент И 16 начинают поступать на вход счетчика 18. Код числа, записанного в счетчике, непрерывно сравнивается в схеме 20 сравнения с кодом числа, соответствующего длине отрезка ВС, хранящегося в щифраторе 22. При наборе в счетчике 18 числа, равного расстоянию ВС, на выходе схемы 20 сравнения появляется сигнал, который перебрасывает триггер 25 в состояние «1. Выходной сигнал триггера 25 открывает элемент И 17 и разрещает прохождение импульсов с датчика 8 угла поворота барабана моталки на вход счетчика 19. Код числа, записанного в счетчике 19, .непрерывно сравнивается в схеме 21 сравнения с кодом числа, соответствующего углу поворота барабана, при котором задний конец полосы перемещается из точки С в точку D. Это число
5
хранится в щифраторе 23. При равенстве этих кодов на выходе схемы 21 сравнения появляется сигнал, который перебрасывает триггер 24 в состояние «1. Сигнал с выхода триггера 24 поступает в схему управления приводом барабана моталки, и привод отключается.
При подходе переднего конца следующей
полосы к датчику 2 происходит установка
счетчиков 18, 19, триггеров 24, 25 в исходное
О состояние и вычислительный блок 9 готов к
следующему циклу работы.
Таким образом, вычислительное устройство 9 отрабатывает свою программу в наиболее благоприятных условиях при движении полосы на ползучей скорости и отсутствии при этом пробуксовки формирующего ролика 4 относительно полосы и рулона относительно барабана моталки. За счет этого достигается высокая точность останова моталки с рулоном в заданном положении. 0 Этим обуславливается эффективность использования предлагаемого устройства.
Формула изобретения
Устройство для точного останова мотал- 5 ки листового стана, содержащее датчик наличия полосы перед тянущими роликами, датчики угла поворота формирующего ролика и барабана моталки, выходы которых подключены к вычислительному устройству, выход которого включен в схему управления приводами моталки, отличающееся тем, что, с целью повыщения точности останова моталки за счет исключения влияния пробуксовки рулона относительно барабана, она снабжено датчиком положения полосы, установленным на фиксированном расстоянии от датчика наличия полосы перед тянущими роликами, соединенными последовательно блоком измерения скорости полосы и арифметическим устройством, а также включенными последовательно триггером, схемой И, 0 счетчиком и схемой сравнения, на другой вход которой подключен выход арифметического устройства, а выход схемы сравнения включен в схему управления приводом моталки, причем другой вход арифметического устройства подключен к выходу триггера, а 5 другой вход схемы И и вход блока измерения скорости полосы соединены с выходом датчика угла поворота формирующего ролика.
0
ПТ .
ij a Un,
Фиг.1
Останов
Составитель В. Грибова
Корректор И. Муска Подписное
Редактор Н. ШвыдкаяТехред.И. Верес
Заказ 807/6Тираж 733
ВНИИПИ Государствеииого комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж - 35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2
Составитель В. Грибова
Корректор И. Муска Подписное
ехред.И. Верес
ираж 733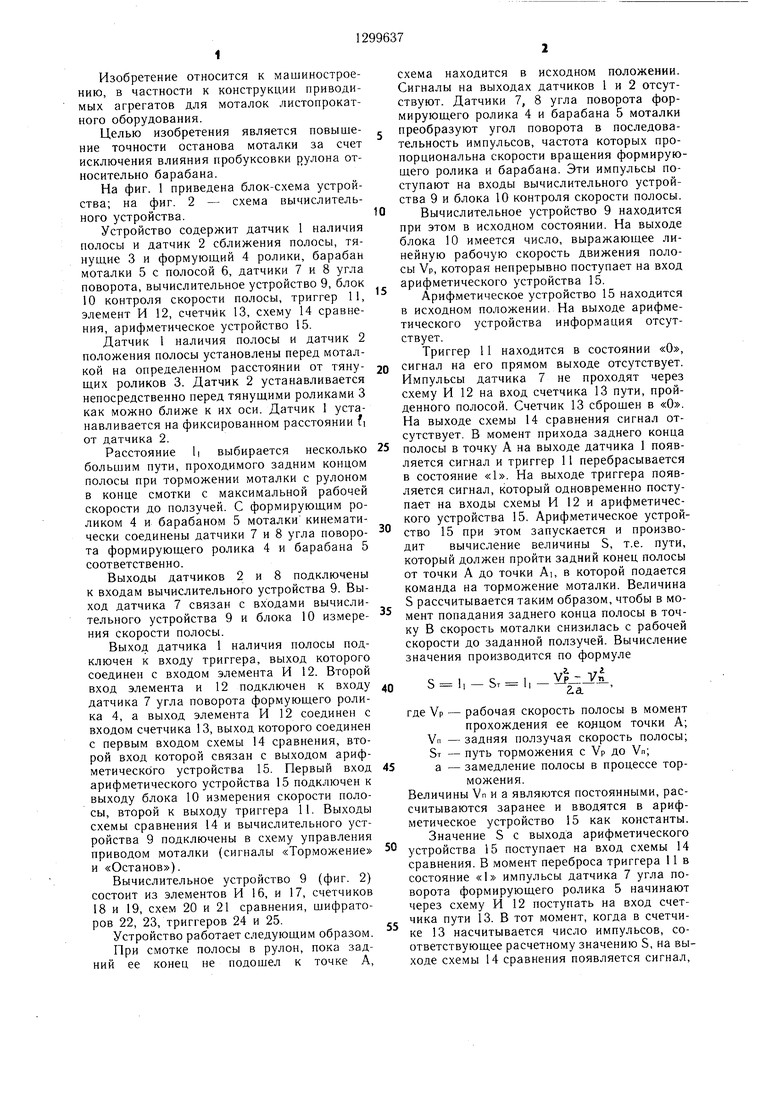

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова барабана моталки | 1980 |
|
SU902891A1 |
| Способ автоматического останова моталки с рулоном в заданном положении на листовом стане | 1982 |
|
SU1052297A2 |
| Устройство для точной остановки барабана моталки | 1972 |
|
SU481345A1 |
| Устройство для управления моталкой прокатного стана | 1981 |
|
SU984533A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА МОТАЛКИ | 1966 |
|
SU188455A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОСТАНОВА МОТАЛКИ ЛИСТОПРОКАТНОГО СТАНА | 1969 |
|
SU246450A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОСТАНОВА МОТАЛКИ С РУЛОНОМ В ЗАДАННОМ ПОЛОЖЕНИИ НА ЛИСТОВОМ СТАНЕ | 1970 |
|
SU275709A1 |
| УСТРОЙСТВО для точного ОСТАНОВА БАРАБАНА МОТАЛКИ НА СТАНАХ ГОРЯЧЕЙ ПРОКАТКИ | 1966 |
|
SU180158A1 |
| Устройство для точного останова барабана моталки | 1972 |
|
SU440181A1 |
| Устройство автоматического управления приводами агрегата при наборе заданной массы полосы на моталке | 1984 |
|
SU1186304A1 |
Изобретение относится к области машиностроения, в частности к конструкции приводных агрегатов для моталок листопрокатного оборудования. Целью изобретения является повышение точности останова моталки за счет исключения влияния пробуксовки рулона относительно барабана. Эта цель достигается за счет использования двух датчиков - положения полосы и наличия полосы перед тянущими роликами. Команда на начало торможения моталки в конце смотки полосы подается автоматически с заранее рассчитанным упреждением, когда задний конец полосы находится еще на отводящем рольганге, для чего используется арифметическое устройство. Упреждение рассчитывается таким образом, что задний конец полосы ложится на рулон при ползучей скорости независимо от принятой скорости моталки, т.е. тогда, когда пробуксовка рулона относительно барабана уже отсутствует. Этим обеспечивается точное определение положения конца полосы на рулоне в процессе доворота барабана, а следовательно, и точность остановки моталки. 2 ил. § СО 1C ( со О) со 
| Устройство для точной остановки барабана моталки | 1972 |
|
SU481345A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
