Изобретение относится к области . землеройного машиностроения, а более конкретно к экскаваторам каналоочисти теля.
Цель изобретения - повышение маневренности путем увеличения крутящего момента.
На фиг. 1 изображен экскаватор- каналоочиститель с уширенным мелиоратинным ковшом, вид сбоку; на фиг. 2 - вид А на фиг. 1, механизм поворота рабочего оборудования; на фиг. 3 - разрез Б-Б на фиг. 2 узел соединения конца штока гидроцилиндра с жесткой тягой; на фиг. 4 - разрез В-В на фиг. 2, жесткая тяга и цепь; на фиг. 5 - разрез Г-Г на фиг. 2, узел соединения конца штока гидроципиндра с жесткой тягой; на фиг. 6 - разрез Д-Д на фиг. 2, натяжная звездочка, цепь жесткие тяги и направляющие натяжного кронштейна.
На экскаваторе-каналоочистителе 1 на поворотной колонне 2 навешено рабочее оборудование 3, установленно на раме машины 4. К раме посредством узла 5 натяжения присоединены гидро- : цилиндры 6 и 7 поворота рабочего ;оборудования. Штоки гидроцилиндров I при помощи осей 8 соединены шарнирно I с жесткими тягами 9 и 10, другим I концом эти тяги соединены осями 11 и 12 с бесконечной (приводной) цепью 13 также шарнирно. Приводная цепь 13 соединяющая звездочки 14 и 15, осуществляет поворот рабочего оборудования 3 при помощи гидроцилиндров ь и 7. Натяжение цепи 13 осуществляется натяжным кронштейном 16, по оси 17 которого вращается натяжная звездочка 15, На оси 18 закреплена неподвижно приводная звездочка 14, вращающая поворотную колонну 2 с рабочим оборудованием 3. Приводная цепь 13 имеет натяжные ветви 19 и 20, а натяжная звездочка 15 снабжена ступицами 21, являющимися направляющими для жестких тяг 9. Внутренние стенки натяжного кронштейна 16, которые также являются направляющими для жестких тяг 9, облицованы накладками 22 и 23. из материала, например фторопласта или полиуретана, с малой величино коэффициента трения.
Механизм работает следующим образом.
Для исключения прогиба и слабины приводной цепи 13 звездочкой 15 и
0
5 0 c 0
0
натяжным кронштейном 16 натягивается приводная цепь 13, а гидроцилиндры 6 и 7 устанавливаются узлом натяжения 5 так, чтобы оси гидроцилиндров 6 и 7 совпадали с осями ветвей 19 и 20 цепи. При повороте оборудования 3, когда у гидроцилиндра 6 шток идет на втягивание, ветвь 19 приводной цепи 13, огибающая звездочку 14, растягивается, а у гидроцилиндра 7 шток идет на выталкивание и растягивает ветвь 20 приводной цепи 13, огибающей звездочку 15. Когда поворот оборудования 3 осуществляется в обратную сторону и шток гидроцилиндра 6 идет на выталкивание, то ветвь 20 приводной цепи 13, огибающая звездочку 15, растягивается гидроцклиндром 6, а шток гидроцилиндра 7 идет на втягивание и ветвь 19 цепи, огибающая звездочку 14, растягивается гидроцилиндром 7.
При повороте оборудования 3 в ту или иную сторону обе ветви 19 и 20 приводной цепи 13 всегда работают на растяжение, следовательно, в приводе приводной цепи 13 работают оба гидроцилиндра 6 и 7 - один из них штоковой полостью, а другой поршневой полостью. Усилия гидроцилиндров 6 и 7 поворота рабочего оборудования 3 суммируются, а крутящий момент увеличивается. Жесткие тяги 9 и 10 двигаются в направляющих, образованных внутренними стенками натяжного кронштена 16, на которьк закреплены направляющие накладки 22 и 23 из материала с низким коэффициентом трения,.и поверхностями ступиц 21 звездочки 15. При дрижении жестких тяг 9 одна из ее сторон скользит по направляющим кронштейна 16, а другая прокатывается по ступицам 21 звездочки 15, тем самым обеспечивается прямолинейность движения тяг 9 и исключается изгиб штоков гидрощшиндров 6 и 7 при их работе на выталкивание, так как проушины штоков гидроцилиндров 6 и 7 соединены с тягами 9 осями 8 шарнирно, а также исключается изгиб и самих тяг 9. Для получения суммирующего момента оба гидроцилиндра 6 и 7 привода поворота рабочего оборудования 3 приводятся в действие от одного насоса и управляются одним распределителем, для этого поршневая полость гидроцилиндра 6 соединена масляной магистралью со штоковой полостью гидроцилиндра 7, а поршневая полость гидроцилиндра 7 соединена магистралью со штоковой полостью гидроцилиндра 6.
Формула изобр.етеник
1. Механизм поворота рабочего оборудования экскаватора-каналоочис- тителя, включающий два гидроцилиндра связанную с их штоками приводную цепь, огибающую приводную звездочку, связанную с расположенным на раме рабочим оборудованием, о т л и ч а Ю щ и и с я тем, что, с целью повьше ния маневренности путем увеличения крутящего момента, механизм снабжен натяжной звездочкой со ступицей и
полым кронштейном, а приводная цепь,: огибающая звездочки, выполнена бесконечной, при этом шток каждого гидроцилиндра посредством расположенной в полом кронштейне жесткой тяги шарнирно соединен с соответствующей ветвью цепи, расположенной между звездочками, причем гидроцилиндры соединены с рамой посредством узла натяжения.
2, Механизм по п. 1, отличающийся тем, что. соединение Штоков и тяг выполнено шарнирным,внутренние стенки полого кронштейна снабжены направляющими, расположенными с возможностью взаимодействия тяг со ступицей натяжной звездочки и упомянутыми направляющими.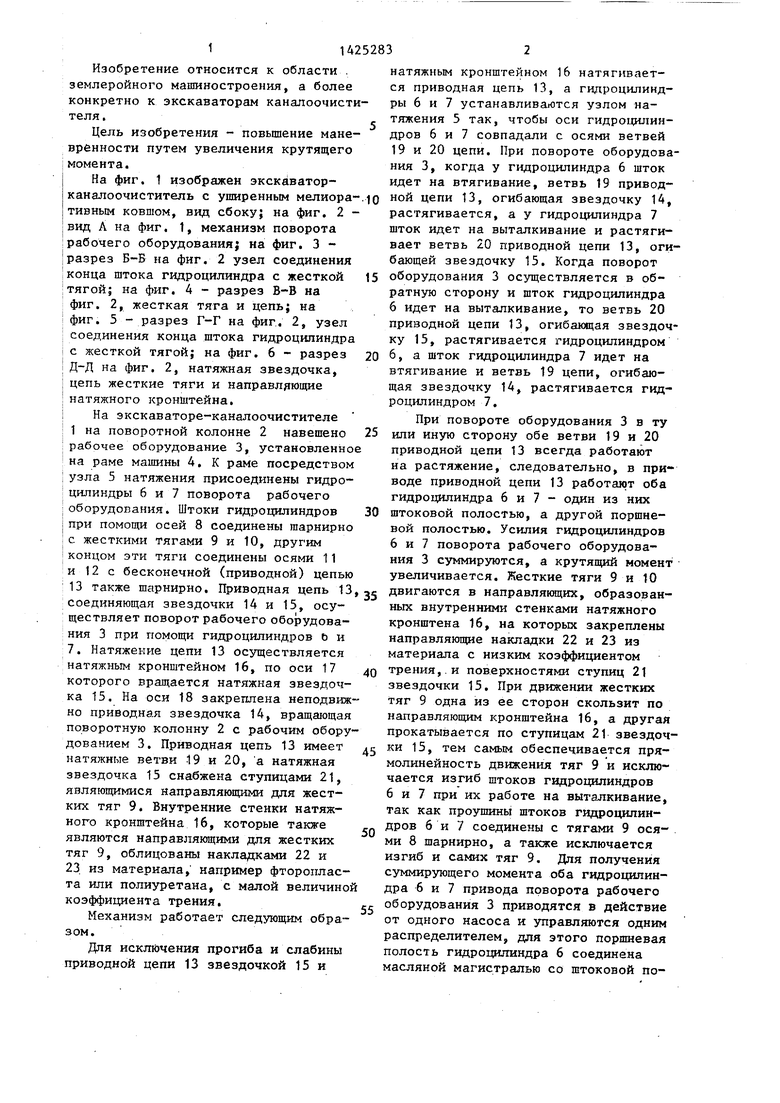
| название | год | авторы | номер документа |
|---|---|---|---|
| Скребковый транспортер траншейного экскаватора | 1979 |
|
SU968194A1 |
| СКРЕБКОВЫЙ ТРАНСПОРТЕР ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1973 |
|
SU400666A1 |
| Механизм привода хода гусеничных машин | 1986 |
|
SU1315570A1 |
| Соединительная тяга конвейера | 1977 |
|
SU707860A1 |
| ПРИВОД ВРАЩЕНИЯ СЦЕНИЧЕСКОЙ ПОВОРОТНОЙ ПЛОЩАДКИ | 2003 |
|
RU2261312C2 |
| Ходовое устройство рабочего органа землеройной машины | 1978 |
|
SU787578A1 |
| Ковш экскаватора | 2022 |
|
RU2787228C1 |
| Ковш экскаватора | 2019 |
|
RU2704669C1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2631062C2 |
| Транспортное средство | 1986 |
|
SU1418120A1 |
Изобретение относится к землеройному машиностроению, а именно к экскаваторам-каналоочистителям. Цель - повьшение маневренности путем увеличения крутящего момента. Механизм Kg Вид А 8 I 1 поворота рабочего оборудования экс- каватора-каналоочистителя включает гидроцилиндры (ГЦ) 6, 7 и приводную цепь (Щ) 13, огибакяцую приводную звездочку 14. Штоки ГЦ 6, 7 при помощи осей 8 соединены шарнирно с жесткими тягами 9, 10. Другим концом тяги 9, 10 соединены осями 11, 12 с бесконечной ПЦ 13 шарнирно. Натяжение ПЦ 13 осуществляется полым кронштейном 16, на оси 17 которого вращается натяжная звездочка 15. Последняя имеет ступицы, являющиеся направляющими для тяг 9, 10. Приводная звездочка 14 связана с расположенным на раме рабочим оборудованием. При повороте оборудования в ту или другую сторону обе ветви 19, 20 ПЦ 13 всегда работают на растяжение. При этом в приводе ПЦ 13 работают оба ГЦ 6, 7 - один из них штоковой полостью, а другой - поршневой. Усилия ГЦ 6, 7 поворота рабочего оборудования суммируются, а крутящий момент увеличивается. 1 з.п,ф-лы, 6 ил. /7/5 ff J2 J9 / / с & (Л 4 to СП IsD 00 GO 16 сриг2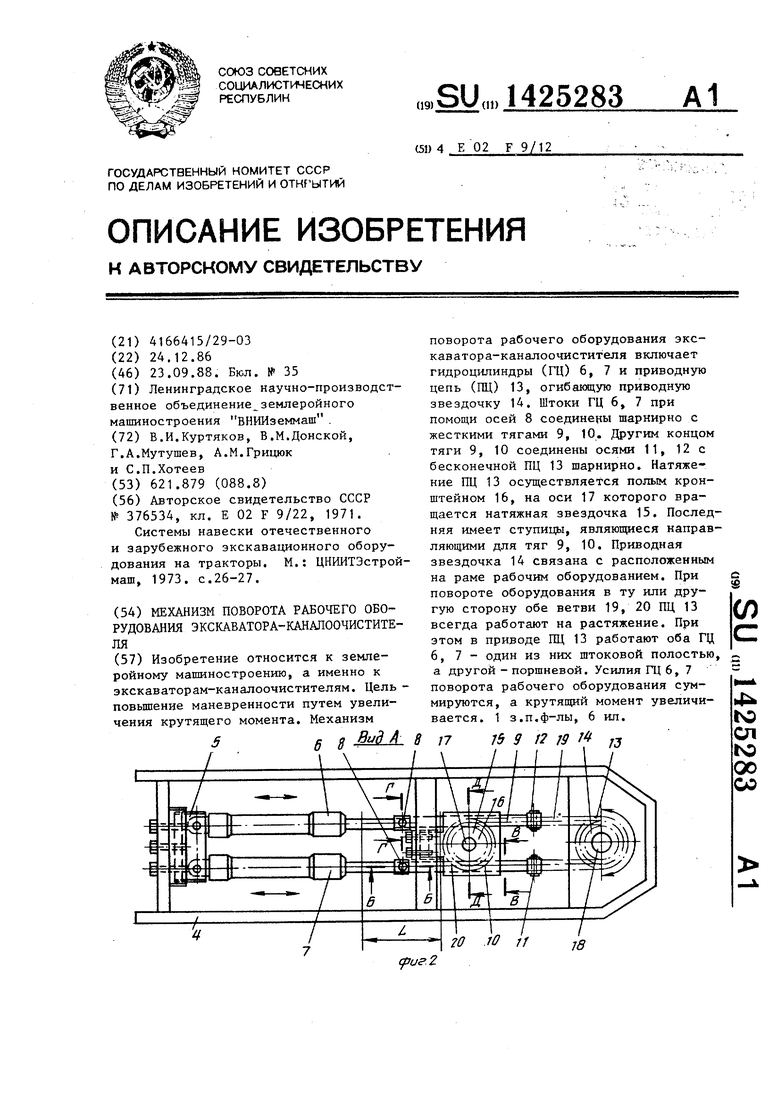
6-6
сригЛ (ригЪ
а А
a si S5«5 i
л П KI/T+ f 7 у
г-г
21
М.
ш
Ш b ssssssssssssg- f
а 5 ,
ри2.6
Составитель В.Прокофьев Редактор А.Ворович Техред М.Ходанич Корректор Э.Лончакова
Заказ 4745/27 Тираж 637Подписное
ВИИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
в-в
| МЕХАНИЗМ ПОВОРОТА НАВЕСНОГО ГИДРАВЛИЧЕСКОГО | 0 |
|
SU376534A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Системы навески отечественного и зарубежного экскавационного оборудования на тракторы | |||
| М.: ЦНИИТЭстрой- маш, 1973 | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
