Изобретение относится к средствам механизации- и автоматизаид и ряда операций при проведении горных выработок, а именно к шахтным манипуляторам.
Целью изобретения является повы- щение эффективности и безопасности работы манипулятора в режиме дистанционного управления.
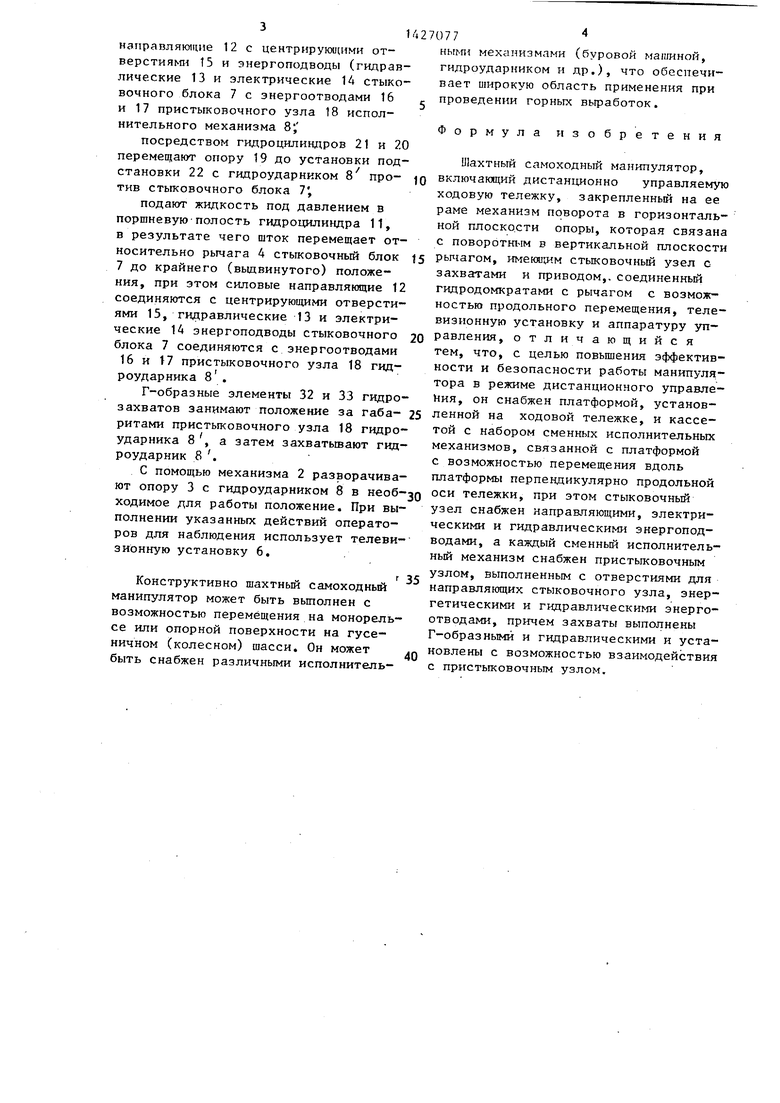
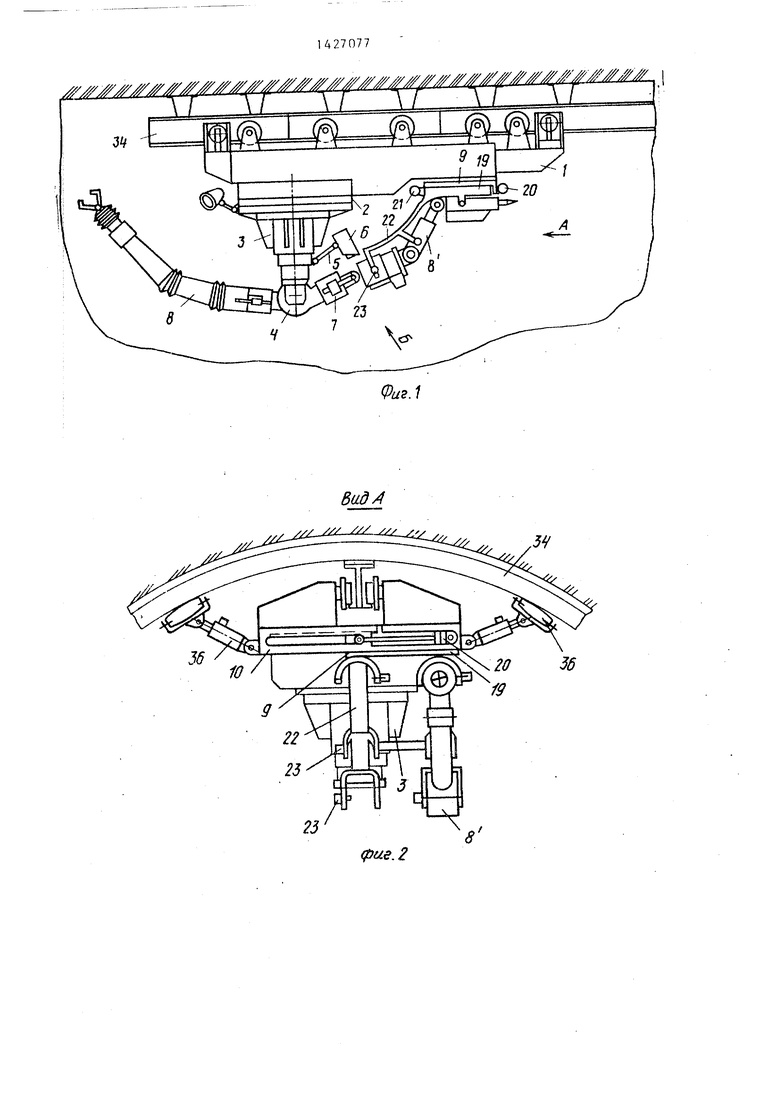
На фиг.1 изображен шахтный само- ходньй манипулятор, размещенный на Монорельсе, общий вид, на фиг.2 - кассета с набором сменных исполнительных механизмов, вид по стрелке А йа фиг.1, на фиг.З - стыковочный блок (узел), вид по стрелке Б на фиг.1, на фиг.4 - манипулятор, установленный на ходовом механизме, общий вид.
; Шахтный самоходный манипулятор состоит из дистанционно управляемой ходовой тележки 1, закрепленного на eie раме механизма 2 поворота в горизонтальной плоскости опоры 3, с поворотным в вертикальной плоскости рычагом 4, поворотного рычага 5 с телевизионной установкой 6, стыковочного блока 7 для оперативного соединения (разъединения) со сменным исполни- тельным механизмом: манипулятором 8 и гидроударником 8, с учетом силового удержания и подключения к нему питающей энергии, и кассеты 9 для удержания и перемещения сменных исполнительных механизмов, например, манипулятора или гидроударника, относительно платформы 10, закрепленной на тележке 1, в заданное положение. Стыковочный блок 7 закреплен с возможностью относительного продольного перемещения посредством гидроцилиндра 11 на рьтчаге 4 и имеет силовые направляющие 12 к гидравлические 13 и электрические 14 энергоподводы для соединения соответственно с центрирующими отверстиями 15 и гидравлическими 16 и электрическими 17 энергоотводами в корпусе пристыковочного узла 18 исполнительного механизма, т.е. коммутации гидравлических и электрических цепей между последним и ходовой те- Л(гжкой 1. Кассета 9 имеет подвижную в поперечном (относительно продольной оси ходовой тележки 1) направлении опору 19 с приводом от гидроцилиндров 20 и 21 с подставками 22. и фиксаторами 23 исполнительных механизмов, .Зс крепленную на платформе 10 тележ
ки 1. На стыковочном блоке 7 закреплены с возможностью поворота в горизонтальной плоскости гидрозахваты (захваты) 24 и 25, с корпусами которых соединены штоки 26 и 27 дополнительных гидроцилиндров 28 и 29, также закрепленных шарнирно на стыковочном блоке 7. На концах штоков 30 и 31 гидрозахватов 24 и 25 закреплены Г-образные элементы 32 и 33 для прижима выступов на корпусе пристыковочного узла 18 сменного исполнительного механизма при его прижиме к стыковоч- ному блоку 7. Шахтный самоходный манипулятор размещен на монорельсе 34. Позицией 35 обозначено положение ответной части исполнительного механизма в состыкованном положении. Манипулятор включает распорную лыжу 36.
Работа шахтного самоходного манипулятора рассмотрена на примере замены сменных исполнительных механизмов. При замене манипулятора на гидроударник предусматривается следующая последо вательность действий:
с помощью механизма 2 поворота
разворачивают опору 3 с манипулятором 8 на 180 от положения, показанного на фиг.1;
посредством гидроцилиндров 21 и 20 перемещают опору 19 до установки свободной подставки 22 против пристыко- вочного узла 18 манипулятора 8,
поворачивают рычаг 4 в вертикальной плоскости до установки манипулятора 8 на подставке 22 и стопорят его на последней с помощью фиксаторов 23J
выдвигают штоки 30 и 31 гидрозахватов 24 и 25 (подавая жидкость под давлением в поршневые полости), в результате чего освобождают присты- ковоЧный узел 18 манипулятора 8 от захвата Г-образными элементами 32
выдвигают штоки 26 и 27 гидроци-f
линдров 28 и 29 (подавая жидкость под давлением в штоковые полости), за счет чего подворачивают гидроза- хваты 24 и 25 до занятия Г-образными элементами 32 и 33 положения за габаритами пристыковочного узла 18 манипулятора 8J
подают рабочее тело под давлением в штоковую полость гидроцилиндра 11, в результате чего шток перемещает относительно рычага 4 стыковочньм блок 7 до крайнего вдвинутого положения, при этом разъединяются силовые
направляющие 12 с центрнрукяцимн отверстиями 15 и энергоподводы (гидравлические 13 и электрические 1А стыковочного блока 7 с энергоотводами 16 и 17 пристыковочного узла 18 исполнительного механизма 8;
посредством гидроцилиндров 21 и 20 перемещают опору 19 до установки подстановки 22 с гидроударником 8 про- тив стыковочного блока 7,
подают жидкость под давлением в поршневую-полость грздроцилиндра 11, в результате чего шток перемещает относительно рычага 4 стыковочный блок 7 до крайнего (выдвинутого) положения, при этом силовые направляющие 12 соединяются с центрирующими отверстиями 15, гидравлические 13 и электрические 14 энергоподводы стыковочного блока 7 соединяются с энергоотводами 16 и 17 пристыковочного узла 18 гидроударника 8 .
Г-образные элементы 32 и 33 гидроным1 мехапизмаьти (буровой мапшной, гидроударником и др.), что обеспечивает широкую область применения при проведении горных выработок.
Формула изобретения
Шахтный самоходный манипулятор, включающий дисташшонно управляемую ходовую тележку, закрепленньй на ее раме механизм поворота в горизонтальной плоско.сти опоры, которая связана с поворотшчм в вертикальной плоскости рычагом, имеюиц м стыковочный узел с захватами и приводом,, соединенный гидродомкратами с рычагом с возможностью продольного перемещения, телевизионную установку и аппаратуру управления, отличающийся тем, что, с целью повьппения эффективности и безопасности работы манипулятора в режиме дистанционного управления, он снабжен платформой, установ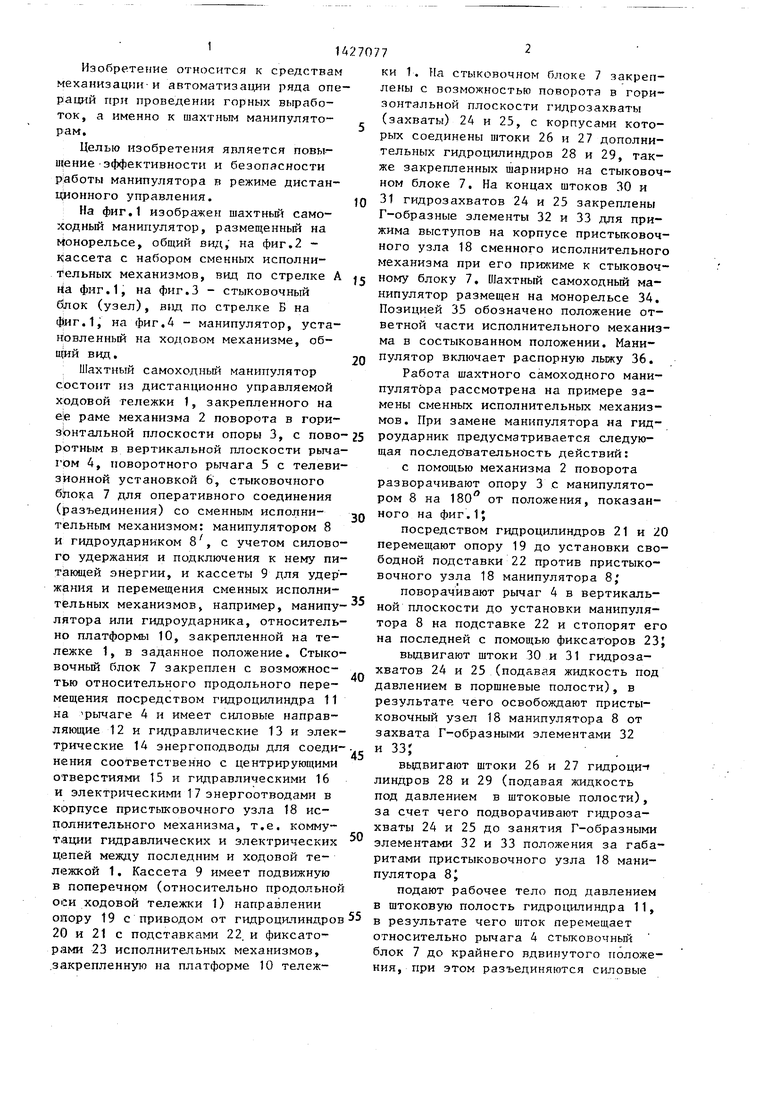
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный самоходный манипулятор | 1989 |
|
SU1724883A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| МАШИНА ДЛЯ РАСКОЛА КАМНЯ | 1991 |
|
RU2014452C1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ДЕТАЛЕЙ С НАКОПЛЕНИЕМ ИХ В КАССЕТАХ | 2015 |
|
RU2604161C2 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Установка для металлизации изделий | 1980 |
|
SU931797A1 |
Изобретение относится к сред-, ствам механизации и автоматизации ряда операций при проведении горных, выработок. Цель изобретения - повышение эффективности и безопасности работы манипулятора в режиме дистанционного управления. На раме дистанционно управляемой ходовой тележки закреплен механизм поворота в горизонтальной плоскости опоры. Последняя связана с-поворотным в вертикальной плоскости рьгчагом 4. Он соединен гидродомкратами со стыковочным узвизе . ttiSepHymma ISO д. да tf 7 И W У1 лом рем гид рав чес вод ма, щен дол с н хан при под лос рем до пра рую эне дам раб роц сое ями эне ж /и J ь ISO лом 7 с возможностью продольного перемещения. Узел 7 имеет Г-образные гидравлические захваты 24 и 25, направляющие 12, энергоподводы гидравлические 13 и электрические 14 и приводы. На тележке установлена -платформа, с которой с возможностью перемещения вдоль нее перпендикулярно продольной оси тележки связана кассета с набором сменных исполнительных механизмов. Каждый такой механизм имеет пристыковочный узел 18. Рабочее тело под давлением подают в штоковую полость гидроцилиндра 11. Его шток перемещает относительно рычага 4 узел 7 до крайнего вдвинутого положения. Направляющие 12 разъединяются с центрирующими отверстиями 15 узла 18, а энергоподводы 13 и 14 - с энергоотводами 16 и 17 узла 18. При подаче рабочего тела в штоковую полость гидроцилиндра 11 узел 7 перемещается, соединяя направляюпще 12 с отверстиями 15 и энергоподводы 13 и 14 с энергоотводами 16 и 17. 4 ил. S (Л ts3 о гв г«
захватов занимают положение за габа- 25 ленной на ходовой тележке, и кассетой с набором сменных исполнительных механизмов, связанной с платформой с возможностью перемещения вдоль платформы перпендикулярно продольной
ритами пристыковочного узла 18 гидроударника 8 , а затем захватьтают гвд- роударник 8 .
С помощью механизма 2 разворачивают опору 3 с гидроударником 8 в необ-дд оси тележки, при этом стыковочный ходимое для работы положение. При вы- узел снабжен направляющими, электри- полнении указанных действий операторов для наблюдения использует телевизионную установку 6.
ческими и гидравлическими энергоподводами, а каждый сменный исполнительный механизм снабжен пристыковочным узлом, выполненным с отверстиями для направляющих стыковочного узла, энергетическими и гидравлическими энергоотводами, причем захваты выполнены Г-образными и гидравлическими и установлены с возможностью взаимодействия с пристыковочным узлом.
Конструктивно шахтный самоходный манипулятор может быть вьшолнен с возможностью перемещения на монорельсе или опорной поверхности на гусеничном (колесном) шасси. Он может быть снабжен различными исполнительтой с набором сменных исполнительных механизмов, связанной с платформой с возможностью перемещения вдоль платформы перпендикулярно продольной
оси тележки, при этом стыковочный узел снабжен направляющими, электри-
оси тележки, при этом стыковочный узел снабжен направляющими, электри-
ческими и гидравлическими энергоподводами, а каждый сменный исполнительный механизм снабжен пристыковочным узлом, выполненным с отверстиями для направляющих стыковочного узла, энергетическими и гидравлическими энергоотводами, причем захваты выполнены Г-образными и гидравлическими и установлены с возможностью взаимодействия с пристыковочным узлом.
хГхГ ж жг- ; жж/-ж
,Вад/
5
«г.
г1 хгжж/г жж /« : ж.жж
ФагМ
| Подвесной шахтный кран | 1973 |
|
SU473834A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
