Изобретение относится к вычислительным средствам систем управления и автоматизации производственных процессов и может быть использовано в системах числового программного управления станками.
Цель изобретения - расширение функциональных возможностей устройства за счет коррекции эквидистанты для контуров с изломом.
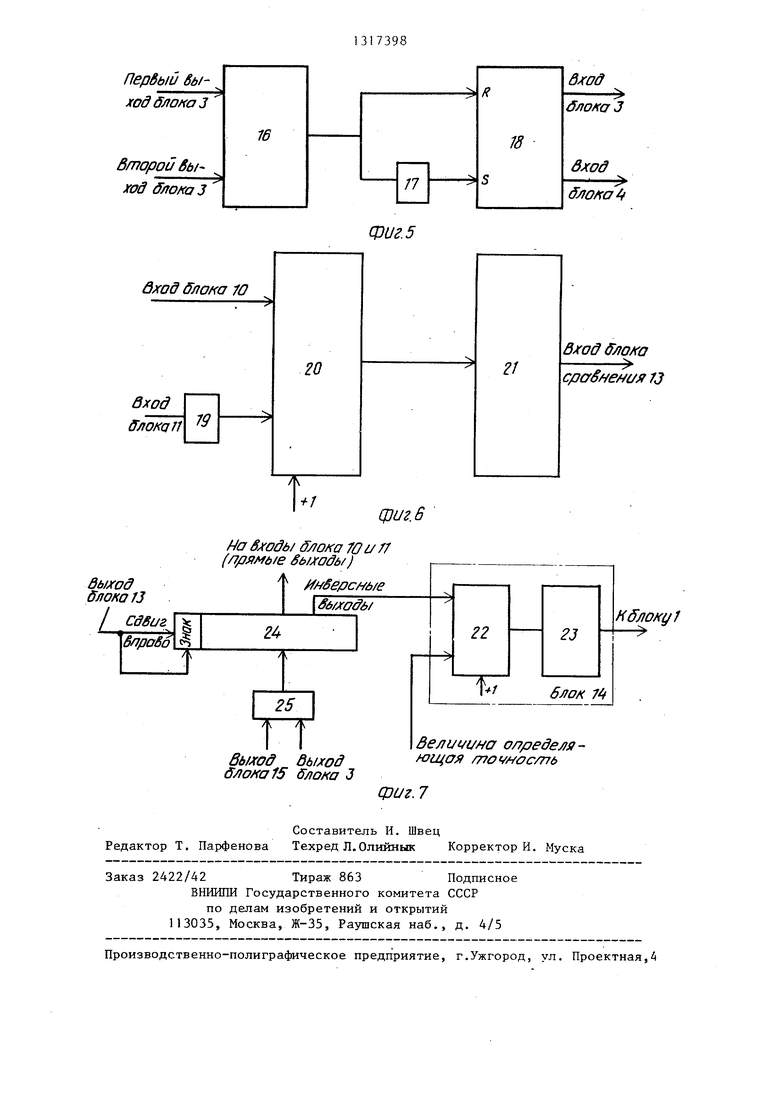
На фиг. 1 изображена схема предлагаемого устройства для коррекции эквидистанты; на фиг. 2-4 - геометрические интерпретации нахождения эквидистантных поправок; на фиг. 5 - блок выделения нуля; на фиг. 6 - блок формирования разности поправок на фиг. 7 - блок формирования шага интерполяции и блок анализа шага ин- терйоляции.
Устройство для коррекции эквидистанты содержит блок 1 задания программы, основной линейно-круговой интерполятор 2, вспомогательный линейно-круговой интерполятор 3, блок 4 регистрации окончания коррекции, блок 5 выделения нуля, генератор 6 тактовых импульсов, распределитель 7 кода, блоки 8 и 9 формирования разности поправок, вспомогательные линейные интерполяторы 10 и II, блок формирования шага интерполяции блок 13 сравнения, блок 14 анализа шага интерполяции, блок 15 памяти,
Блок выделения нуля 5 содержит элемент ИЛИ 16, элемент НЕ 17 и RS- триггер 18, блок (8,9) формирования разности поправок содержит элемент НЕ 19, комбинационный сумматор 20 и регистр 21.
Блок 14 анализа шага интерполяции содержит сумматор 22 и элемент 2 анализа на нуль, а блок 12 состоит из сдвигового регистра 24 и элемента ИЛИ 25.
нейная интерполяция отрезков ОА и ОБ
Блок 1 задания программы представ- от точки О шагами, равными ОС и OD ляет собой фотосчитывающее устрой- соответственно. Таким путем находят- ство типа FS1500. Основной и вспомо- ся сигналы, соответствующие точкам гательные линейно-круговые интерполя- Q , Затем определяется текущий сигторы 2 и 3, а также линейные интерполяторы 10 и И представляют собой обычные интерполяторь, работающие по методу оценочной функции. Блок выделения нуля представляет собой элемент анализа на ноль регистра интерполятора 3, блок 4 регистрации окончания коррекции 4 представляет собой реверсионный счетчик, блок 15 памянал, соответствующий расстоянию который сравнивается с запомненным сигналом. Для данного контура, представляющего собой острый угол, запом- ненный сигнал больше текущего сигнала, поэтому интерполирование продолжается в прямом направлении шагами той же величины. Таким образом определяются точки , после чего опять
ти представляет.собой регистровую память, собранную, например, на интегральных схемах К155ИР1, блоки 8 и 9 формирования разности поправок представляют собой схемы вычитания,блок 13 сравнения представляет собой схему сравнения кодов, &лок 12 формирования шага интерполяции - сдвиговый регистр должен быть обеспечен сдвиг
вправо для уменьшения величины шага), например, на микросхемах К155ИР1, распределитель 7 кода организован на основе счетчика и коммутатора, например на микросхемах К155ИЕ7 и
К155КП5. Генератор 6 тактовых импульсов реализован на основе счетчика, блок 14 анализа шага интерполяции представляет собой схему сравнения кодов.
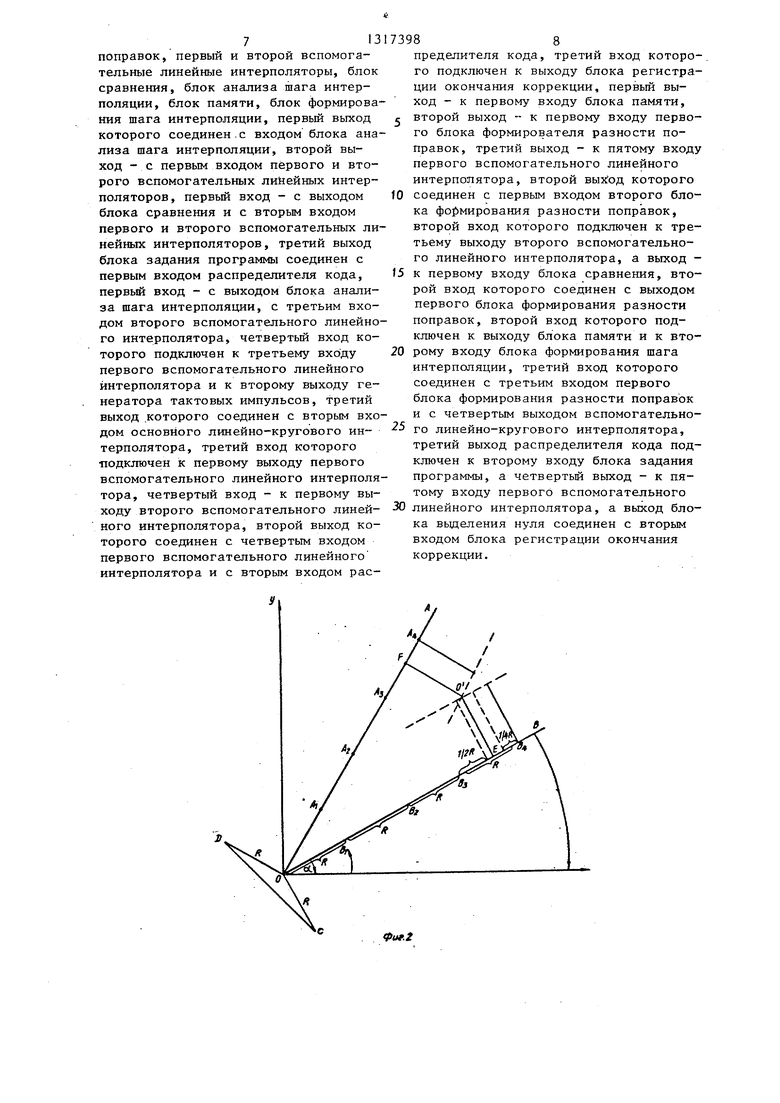
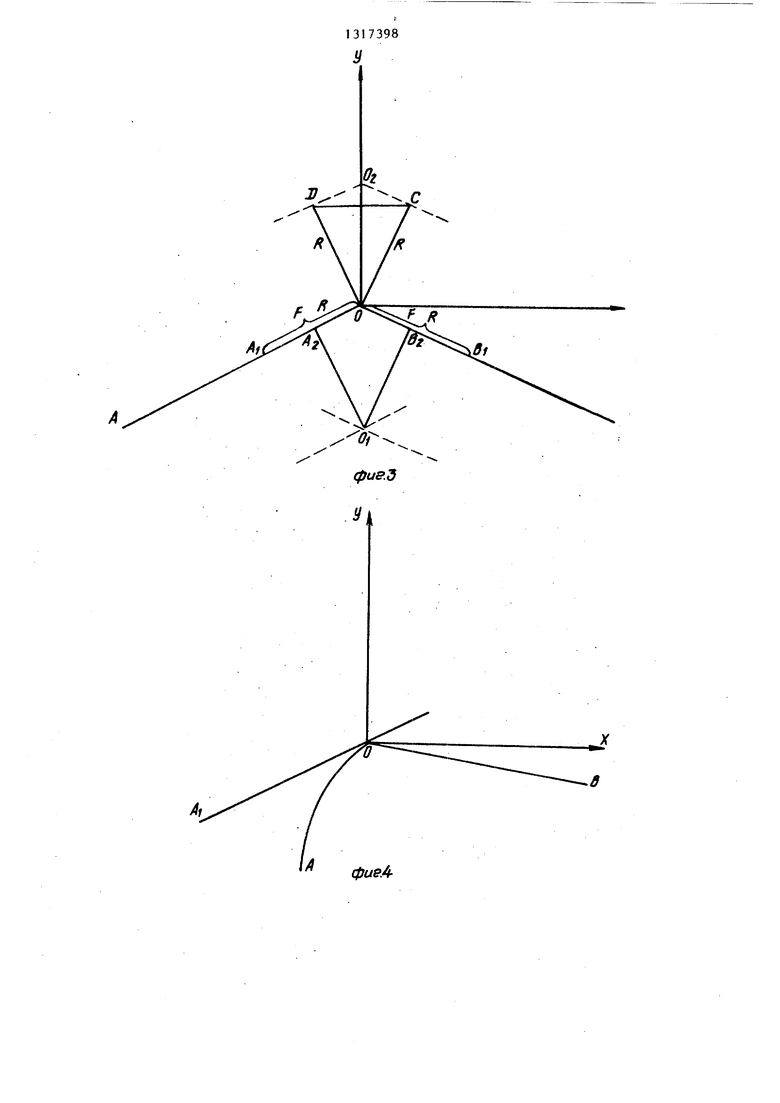
Перед анализом функционирования устройства рассмотрим геометрические интерпритации коррекции (определения кОрректирутош 1х поправок) для острого (фиг, 2), тупого (фиг. 3) углов и
контура, образованного прямой и кривой линиями (фиг. 4).
На фиг. 2 приведен контур, образованный двумя отрезками прямых ОА
и ОБ. Предположим, что обработка контура осуществляется для внутреннего угла в направлении BOA (для упрощения и общности анализа рисунков воспользуемся понятием сигнала, под которым будем понимать в данном случае, код, пропорциональный тем или иным участкам контура). Основные сигналы пропорциональны длине ОА и ОБ, а поправочные - ОЕ и CF. Коррекция заключается в следующем. Пусть точки С и D - конечная и начальная точки эквидис- тант отрезка ВО и ОА соответственно. Запоминается сигнал, пропорциональный расстоянию этими точками.
алее осуществляется синхронная линал, соответствующий расстоянию который сравнивается с запомненным сигналом. Для данного контура, представляющего собой острый угол, запом- ненный сигнал больше текущего сигнала, поэтому интерполирование продолжается в прямом направлении шагами той же величины. Таким образом определяются точки , после чего опять
сравниваются запомненный и текущий сигналы, т.е. до нахождения точек А в которых текущий сигнал больше запомненного. В этом случае осуществляется синхронная линейная интерполя- ция в обратном направлении (к точке О) шагами, уменьшенными вдвое /1/2 R Если запомненный сигнал становится больше текущего, то осуществляется опять синхронная линейная интерполя- ция в прямом направлении шагами, соответствующими предьщущему шагу в обратном направлении и т.д. до тех пор, пока сигналы, соответствующие шагам, не станут меньше одной.диск- реты. Таким образом определяются cor- ответствующие поправкам сигналы ОЕ
и OF. Найденные поправочные сигналы позволяют определить точку 0 , равноудаленную от участков контура ОА и ОВ и являющуюся точкой пересечения внутренних эквидистарт. Данные поправочные сигналы позволяют определить точку пересечения внешних экви- дистант (при обработке внешних уг- лов), поскольку она симметрична точке О, относительно точки О.
Для участков контура, образующих тупой угол (фиг. 3), процесс нахождения поправочных сигналов аналоги- .чен описанному. Предположим, что обработка контура в этом случае также осуществляется в направлении BOA. Основные сигналы пропорциональны АО и ОВ, а поправочные - ОЕ и OF. Пусть точки С и D также конечная и начальная точки эквидистанты отрезков ВО и АО соответственно. Запомненный сигнал пропорционален расстоянию между этими точками. Далее осуществля- ется синхронная интерполяция отрезков ОА и ОБ от точки О шагами, равными ОС и OD соответственно. Сигнал, соответствующий расстоянию А и В, сравнивается с запомненным сигналом В данном случае запомненньш сигнал оказывается меньше текущего, поэтому интерполирование продолжается в обратном направлении шагами, уменьшенными вдвое. Таким образом находятся точки А и В и т.д., аналогично до тех пор, пока сигналы, соответствующие щагам, не станут меньшей одной дискреты. Найденный поправочньм сигнал позволяет определить точку 0 (точку пересечения внутренних экви- дистант) и точку, симметричную точке 0 (точке пересечения внешних эк- видистант).
0
o 5
5
р д , п е
5
Точно также определяются поправочные сигналы для контуров, образован-- ными любыми пересечениями любых кривых. Это вытекает из того, что поправочные сигналы для криволинейных участков в точках их пересечения можно заменить касательными (фиг. 4). Вместо рассмотренных участков BOA можно рассмотреть участки BOA, что аналогично тупому углу.
Устройство для коррекции эквидистанты, работает следующим образом.
Информа1 ия о конечной точке первого из двух соседних участков контура детали поступает в основной 2 и вспомогательный 3 линейно-круговые интерполяторы. После чего на вспомогательном линейно-круговом интерполяторе 3 рассчитываются корректирующие поправки следующим образом.
Информация о начальной и конечной точках дуг окружностей или о конечной точке отоезка прямой передается на основной интерполятор 2 из блока 1 задания программы. Одновременно алгебраические величины координаты конечных точек передаются на вспомогательный линейно-круговой интерполятор 3. От генератора 6 тактовых импульсов начинают поступать тактовые импульсы. Круговая интерполяция, например, против часовой стрелки осуществляется до момента пересечения оси X интерполируемой дугой. Во время интерполяции блок 4 регистрации окончания коррекции считает количество итераций, которое пропорционально углу поворота. Момент пересечения определяется блоком выделения нуля (путем анализа координаты Y интерполируемой дуги на О). В этот момент блок 5 выделения нуля передает сигнал в вспомогательный линейно- круговой интерполятор на обнуление регистра текущей координаты X, а также сигнал на реверс вспомогательного линейно-кругового интерполятора 3 и блок 4 регистрации окончания коррекции. В регистр текущей информации (X) заносится радиус инструмента из блока 1 задания программы, а затем, подавая тактовые импульсы на вспомогательный линейно-круговой интерполятор 3, осуществляют круговую интерполяцию на первоначальный угол.Блок 4 регистрации окончания коррекции регистрирует конец поворота на заданный угол путем анализа количества итераций на ноль и подает сигнал в
513
распределитель 7 кода, который разрешает передачу рассчитанных поправо из вспомогательного линейно-круговог интерполятора 3 в блок 15 памяти, активизируя свой второй выход. После чего распределитель 7 подает сигнал в блок 1 Задания программы по третьему выходу, что обеспечивает передач алгебраических значений координат начальной точки второго участка в вспомогательный линейно-круговой интерполятор 3. После чего процесс расчета поправок повторяется. В результате вспомогательный линейный круговой интерполятор хранит рассчитанные поправки для начальной точки второго участка. После окончания расчета (после получения сигнала с блока 4 регистрации окончания коррекции) распределитель 7 кода вьщает сигнал на блок 8 формирования сигнала разности поправок, в котором формируется и запоминается величина абсолютной разности между рассчитанными поправками поступающими из второго вспомогательного линейно-кругового интерполятора 3 и блока 15 памяти, одновременно с формированием разности выдается сигнал от распределителя 7 кода по четвертому выходу на вспомогательные . линейные интерполяторы 10 и 11 для осуществления линейной интерполяции. Причем в вспомогательном линейном интерполяторе 10 осуществляется расчет поправок для первого участка контура, а в вспомогательном линейном интерполяторе II - второго. Информация о вапичине первого шага интерполяции передается из блока 15 памяти и вспомогательного линейно-кругового интерполятора 3 в блок 12 формирования интерполяции шага. Под действием генератора 6 тактовых импульсов осуществляется первый шаг линейной интерполяции, величина которого равна рассчитанным поправкам. Одновременно с интерполяцией в блоке 9 формирования разности поправок округляется абсолютная разность координат между текущими точками интерполяции. В блоке 13 сравнения сравнивается разность между поправками, которая хранится в блоках 8 и 9 формирования разности поправок. Если разность между поправками превьшгает рассчитанную, то величина следующего шага линейной интерполяции и направление остаются прежними. Если разность между поправками меньше рассчитанной, то
86
блок формирования шага интерполяции уменьшает величину шага вдвое и изменяет его знак на противоположный. Процесс продолжается до тех пор, пока величина шагов не станет меньше величины, определяющей точность, что фиксирует блок 14, вырабатывая при этом сигнал остановки. После этого происходит передача рассчитанных поправок из вспомогательного линейного интерполятора 10 в основной линейно- круговой интерполятор 2, который начинает свою работу по сигналу из блока 12. После отработки первого участка из блока 1 задания программы в распределитель 7 поступает сигнал, . по которому из вспомогательного линейного интерполятора 11 в основной линейно-круговой интерполятор 2 поступают поправки для второго участка. На этом цикл работы устройства заканчивается .
Таким образом, введение в устройство распределителя кода, двух блоков
формирования разности поправок, двух вспомогательных линейных интерполяторов, блока формирования шага интерполяции, блока анализа шага интерполяции, блока памяти позволяет обеспечить автоматический расчет корректирующих поправок для контуров с изломом.
Формула изобретения
Устройство для коррекции эквидис- танты, содержащее блок задания программы, первые выходы которого соединены с первыми входами основного линейно-кругового интерполятора, вторые входы - с вторыми входами основного линейно-кругового интерполятора и с первыми входами вспомогательного линейно-кругового интерполятора, первый выход которого подключен к первому входу блока регистрации окончания коррекции, второй и третий Выходы соответственно к первому и второму входам блока выделения нуля, первый выход блока выделения нуля соединен с вторым входом вспомогательного линейно-кругового интерполятора,, третий вход которого подключен к первому выходу генератора тактовых импульсов, отличающееся тем,
что, с целью расширения функциональных возможностей устройства за счет коррекции эквидистанты для контуров с изломом, введены распределитель кода, два блока формирования разности
713
поправок, первый и второй вспомогательные линейные интерполяторы, блок сравнения, блок анализа шага интерполяции, блок памяти, блок формирования шага интерполяции, первый выход которого соединен.с входом блока анализа шага интерполяции, второй выход - с первым входом первого и второго вспомогательных линейных интерполяторов, первый вход - с выходом блока сравнения и с вторым входом первого и второго вспомогательных линейных интерполяторов, третий выход блока задания программы соединен с первым входом распределителя кода, первый вход - с выходом блока анализа шага интерполяции, с третьим входом второго вспомогательного линейного интерполятора, четвертый вход которого подключен к третьему входу первого вспомогательного линейного интерполятора и к второму выходу генератора тактовых импульсов, третий выход .которого соединен с вторым входом основного линейно-кругового интерполятора, третий вход которого подключен к первому выходу первого вспомогательного линейного интерполятора, четвертый вход - к первому выходу второго вспомогательного линейного интерполятора, второй выход которого соединен с четвертым входом первого вспомогательного линейного интерполятора и с вторым входом рас73988
пределителя кода, третий вход которо-, го подключен к выходу блока регистрации окончания коррекции, первый выход - к первому входу блока памяти,
с второй выход - к первому входу первого блока формирователя разности поправок, третий выход - к пятому входу первого вспомогательного линейного интерполятора, второй которого
10 соединен с первым входом второго блока фо)мирования разности поправок, второй вход которого подключен к третьему выходу второго вспомогательного линейного интерполятора, а выход -
15 к первому входу блока сравнения, второй вход которого соединен с выходом первого блока формирования разности поправок, второй вход которого подключен к выходу блока памяти и к вто0 рому входу блока формирования шага интерполяции, третий вход которого соединен с третьим входом первого блока формирования разности поправок и с четвертым выходом вспомогательно 5 го линейно-кругового интерполятора, третий выход распределителя кода подключен к второму входу блока задания программы, а четвертьй выход - к пятому входу первого вспомогательного
30 линейного интерполятора, а выход блока вьщеления нуля соединен с вторым входом блока регистрации окончания коррекции.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| СПОСОБ КОРРЕКЦИИ ЭКВИДИСТАПТЫЙСЯСОЮЗНАЯ^ • .'*"v-' - -"••;v-||Ap|, . ) .-il : Jb ' , ., •:, .^ -tltit'',b:-u.:^;-;o,,:^KA ( | 1971 |
|
SU295113A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
| Устройство для коррекции эквидистанты | 1991 |
|
SU1803904A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1282082A1 |
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
Изобретение относится к вычислительным средствам систем управления и автоматизации производственных процессов и может быть использовано в системах числового программного управления станками и другим технологическим оборудованием. Цель изобретения - расширение функциональных возможностей устройства за счет коррекции эквидистанты для контуров с изломом. Устройство для коррекции эквидистанты содержит блок 1 задания программы, основной линейно-круговой интерполятор 2, вспомогательный линейно-круговой интерполятор 3, блок 4 регистрации окончания коррекции, блок 5 выделения нуля, генератор 6 тактовых импульсов, распределитель 7 кода, первый блок 8 формирования разности поправок, второй блок 9 формирования разности поправок , первый вспомогательный линейный интерполятор 10, второй вспомогательный линейный интерполятор 11, блок 12 формирования шага интерполяции, блок 13 сравнения, блок 14 анализа шага интерполяции, блок 15 памяти. Введение распределителя кода, двух блоков формирования разности поправок, двух вспомогательных линейно-круговых интерполяторов , блока формирования шага интерполяции, блока анализа шага интерполяции и блока памяти позволило обеспечить автоматический расчет корректирующих поправок для контуров с изломом. 7 ил. (Л }оо со о оо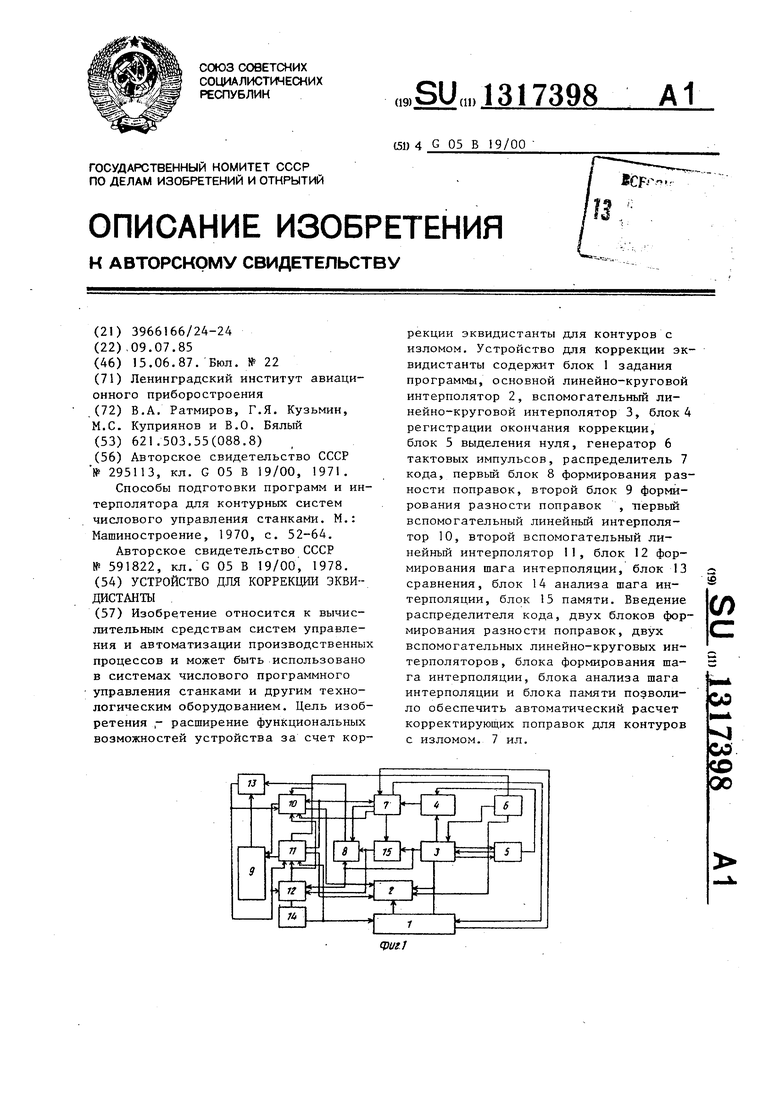
фиеАl
Na d/iof(o
TT
Bb/jfod dbijeod ff/ o/fofS блока J
Составитель И. Швец Редактор Т. Парфенова Техред Л.Олийнык Корректор И. Муска
Заказ 2422/42Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная,4
фиг. 6
дел1л ина определяющая /77OVHOC/ 7b
фиг. 7
| СПОСОБ КОРРЕКЦИИ ЭКВИДИСТАПТЫЙСЯСОЮЗНАЯ^ • .'*"v-' - -"••;v-||Ap|, . ) .-il : Jb ' , ., •:, .^ -tltit'',b:-u.:^;-;o,,:^KA ( | 0 |
|
SU295113A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способы подготовки программ и интерполятора для контурных систем числового управления станками | |||
| М.: Машиностроение, 1970, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
