j::
to
00
05 4
СО
Изобретение относится к транспортному машиностроению, в частности к транспортным средствам с двумя управляемыми мостами.
Цель изобретения - расширение функциональных возможностей привода путем возможности управления как одним, так и двумя мостами.
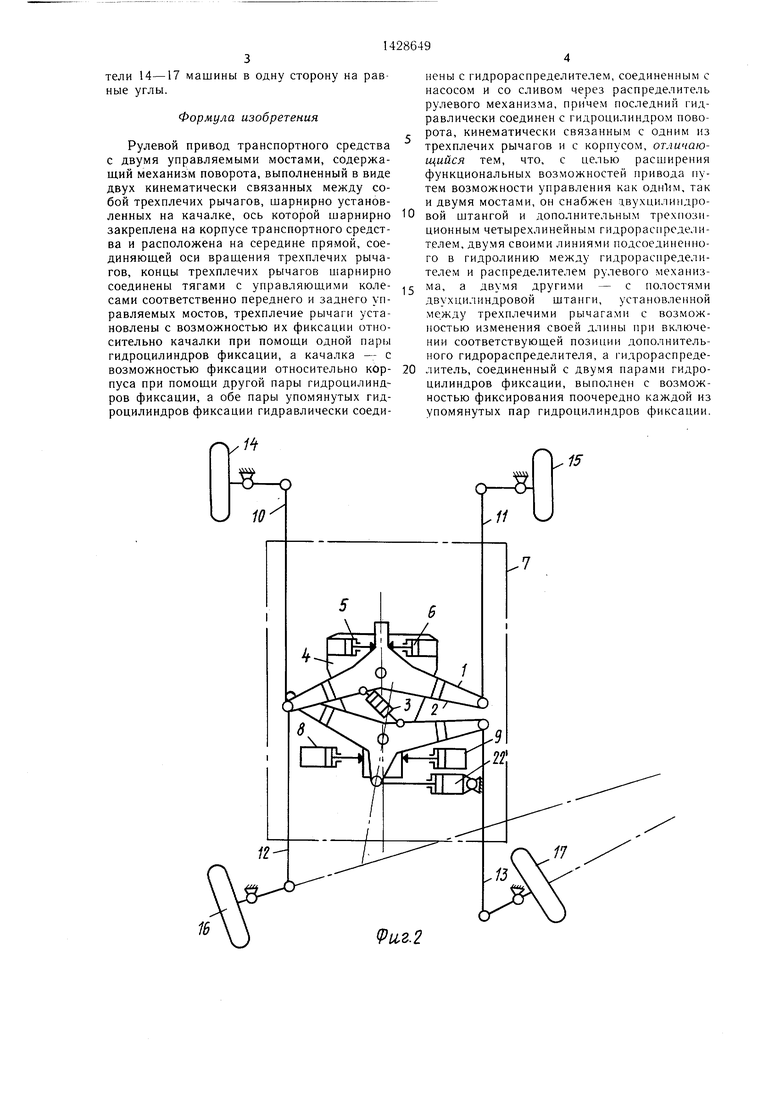
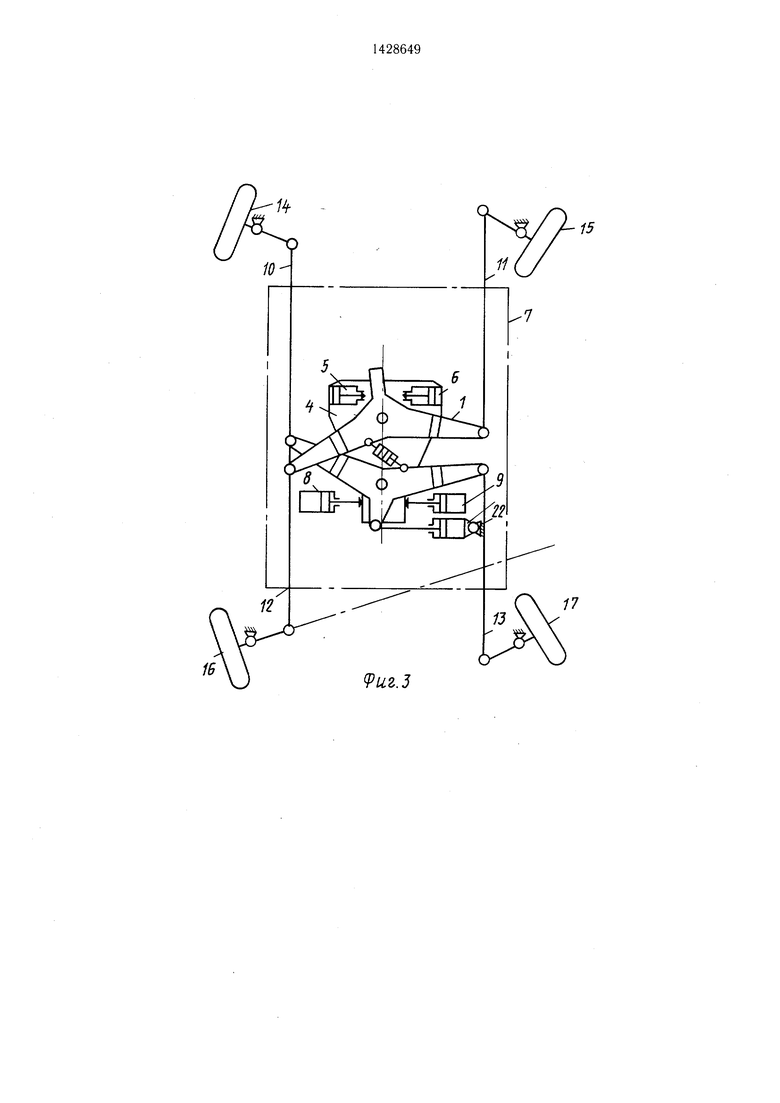
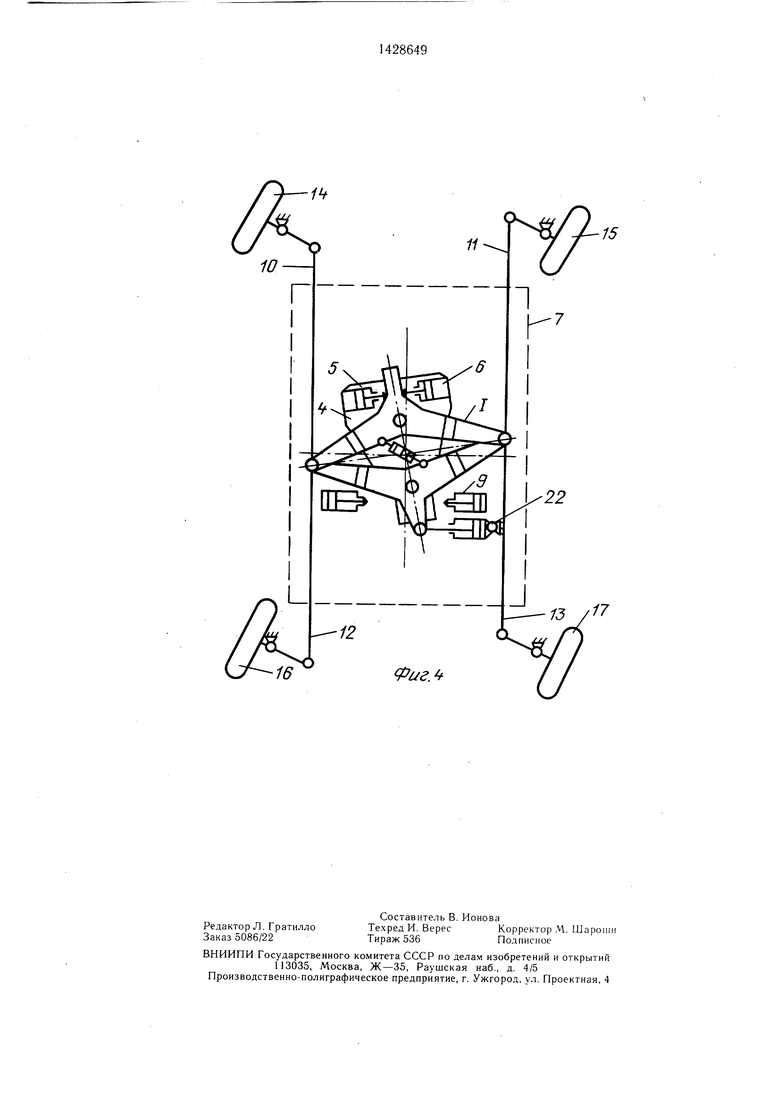
На фиг. 1 дана схема рулевого привода транспортного средства; на фиг. 2 - положение элементов рулевого привода при повороте одного управляемого моста; на фиг. 3 - поворот обоих управляемых мостов; на фиг. 4 - положение элементов рулевого привода во время передвижения машины в сторону без разворота ее корпуса.
Рулевой привод содержит два трех11,:1ечих рычага 1 и 2, шарнирно соединенных между собой двухцилиндровой штангой 3 и установленных на качалке 4, на которой жестко закреплены гидроцилиндры 5 и 6 фиксации, качалка установлена на корпусе 7, на котором жестко закреплены гидроцилиндры 8 и 9 фиксации, тяги 10-13, соединяющие трехплечие рычаги с соответствующими поворотными узлами движителей (опорных элементов) 14-17, насос 18, гидрораспределитель 19 и дополнительный гидрораспреде- литель 20, и гидрораспределитель 21 рулевого управления, г идроцилиндр 22 рулевого управления, гидробак 23, рулевое колесо 24.
Устройство работает следующим образом.
Для осуществления поворота машины при помощи одного управляемого моста гидрораспределитель 19 устанавливается в положение I (управление гидрораспределителем может быть электрическим или ручным), после чего рабочая жидкость от насоса 18 поступит соответствующие полости гидроцилиндров 5, 6, 8 и 9, при этом пара гидроцилиндров 5 и 6 при полностью выдвинутых штоках зафиксирует трехплечий рычаг 1 относительно качалки 4, а пара гидроцилиндров 8 и 9 - качалку 4 в нейтральном положении относительно корпуса 7 машины. После полной фиксации качалки 4 и трехплечего рычага 1 гидрораспределк- тель 19, минуя положение П, переводится в положение 111, при этом рабочая жидкость от насоса 18, пройдя через гидрорас- пределитель 19, поступит в гидрораспределитель 20, который в данном режиме движения должен быть установлен, минуя положение 1У, в положение У, обеспечивающее «плавающее положение двухцилиндровой штанги. В этом случае рабочая жидкость, пройдя распределитель 20, поступает в гидрораспределитель 21 рулевого управления и затем при повороте рулевого колеса 24 в соответствующие полости гидроцилиндра 22 рулевого управления и гидробака 23. При этом один из трехплечих рычагов, (рычаг 2) повернется вокруг своей оси, увлекая за собой тяги 12 и 13, которые повернут движи
0
5
0
5 5
тели 16 и 17 на углы, соответствующие радиусу поворота .мап1ины (фиг. 2).
Для осуществления разворота машины с минимальным радиусом в работу включаются оба управляемых моста. В этом случае гидрораспределитель 19 устанавливается в положение 1У, после чего рабочая жидкость от насоса 18 поступит в соответствующие полости гидроцилиндров 5, 6, 8 и 9, при этом пара гидроцилиндров 8 и 9 при полностью выдвинутых штоках зафиксирует качалку 4 в нейтральном положении относительно корпуса 7 машины, а пара гидроцилиндров 5 и 6 освободит место для apauie- ния трехплечего рычага 1. После полной фиксации качалки 4 и освобождения трехплечих рычагов 1 и 2 гидрораспределитель 19 переводится в положение III, при этом рабочая жидкость от насоса 18, пройдя через гидрораспределитель 19, поступит в гидрораспределитель 20, который необходимо установить в положение У1. Это положение обеспечит поступление рабочей жидкости в требуемые полости двухцилиндровой штанги, гарантирующей жесткую связь между техническими рычагами 1 и 2. Это необходимо для согласования их поворота. Затем гидрораспределитель 20 переводится в положение УП, обеспечивающее пропускание рабочей жидкости к распределителю 21, связанного с гидроцилиндром 22 рулевого управления, рулевым колесо1М 24 и гидробаком 23. При повороте рулевого колеса 24 рабочая жидкость поступит в соответствующие полости гидроцилиндра 22, который повернет трехплечие рычаги, св язанные с тягами 1013
поворотных узлов движителей 14-17.
, Положение движителей и элементов рулевого привода во время разворота с минимальным радиусом показаны на фиг. 3. Для перемещения транспортного средства в сторону без из.менения направления корпуса необходимо переключить распределитель 19 в положение II, после чего гидроцилиплры 8 и 9, освободят качалку 4, а пара гидроцилиндров 5 и 6 при полностью выдвинутых штоках зафиксирует трехплечий рычаг 1 относительно качалки 4. Затем надо перевести гидрораспределитель 19 в положение 111, а гидрораспределители 20 сначала установить в положение У1 (это требуется, если двухцилиндровая штанга была в «плаваюше.м режиме), потом в положение УП. Тогда рабочая жидкость от насоса 18 пройдет к распределителю 21 рулевого управления, мин) я Q распределители 19 и 20 и поступит в соответствующие повороту полости гидроцилиндра 22 рулевого управления или в гидробак 23. При этом зафиксированные относительно качалки 4 трехплечие рычаги 1 и 2, жестко связанные двухцилиндровой щтангой 3, повернутся вокруг оси качалки 4, расположенной на середине прямой, соединяющей оси вращения трехплечих рычагов, увлекая за собой тяги 10-13, которые повернут движи0
тели 14-17 машины в одну сторону на равные углы.
Формула изобретения
Рулевой привод транспортного средства с двумя управляемыми мостами, содержащий механизм поворота, выполненный в виде двух кинематически связанных между собой трехплечих рычагов, шарнирно установленных на качалке, ось которой шарнирно закреплена на корпусе транспортного средства и расположена на середине прямой, сое- диняюш,ей оси врашения трехплечих рычагов, концы трехплечих рычагов шарнирно соединены тягами с управляюшими колесами соответственно переднего и заднего управляемых мостов, трехплечие рычаги установлены с возможностью их фиксации относительно качалки при помощи одной пары гидроцилиндров фиксации, а качалка -г с возможностью фиксации относительно корпуса при помощи другой пары гидроцилиндров фиксации, а обе пары упомянутых гидроцилиндров фиксации гидравлически соединены с гидрораспределителем,соединенным с насосом и со сливом через распределитель рулевого механизма, при чем последний гидравлически соединен с гидроцилиндром поворота, кинематически связанным с одним из трехплечих рычагов и с корпусом, отличающийся тем, что, с целью расширения функциональных возможностей привода путем возможности управления как одн11м, так и двумя мостами, он снабжен авухцилиндровой штангой и дополнительным трехпози- ционным четырехлинейным гидрораспрсдели- телем, двумя своими линиями подсоединенного в гидролинию между гидрораспредели- телем и распределителем рулевого механизма, а двумя другими - с полостями двухцилиндровой штанги, установленной между трехплечими рычагами с возможностью изменения своей длины при включении соответствующей позиции дополнительного гидрораспределителя, а гидрораспределитель, соединенный с двумя парами гидроцилиндров фиксации, выполнен с возможностью фиксирования поочередно каждой из упомянутых пар гидроцилиндров фиксации.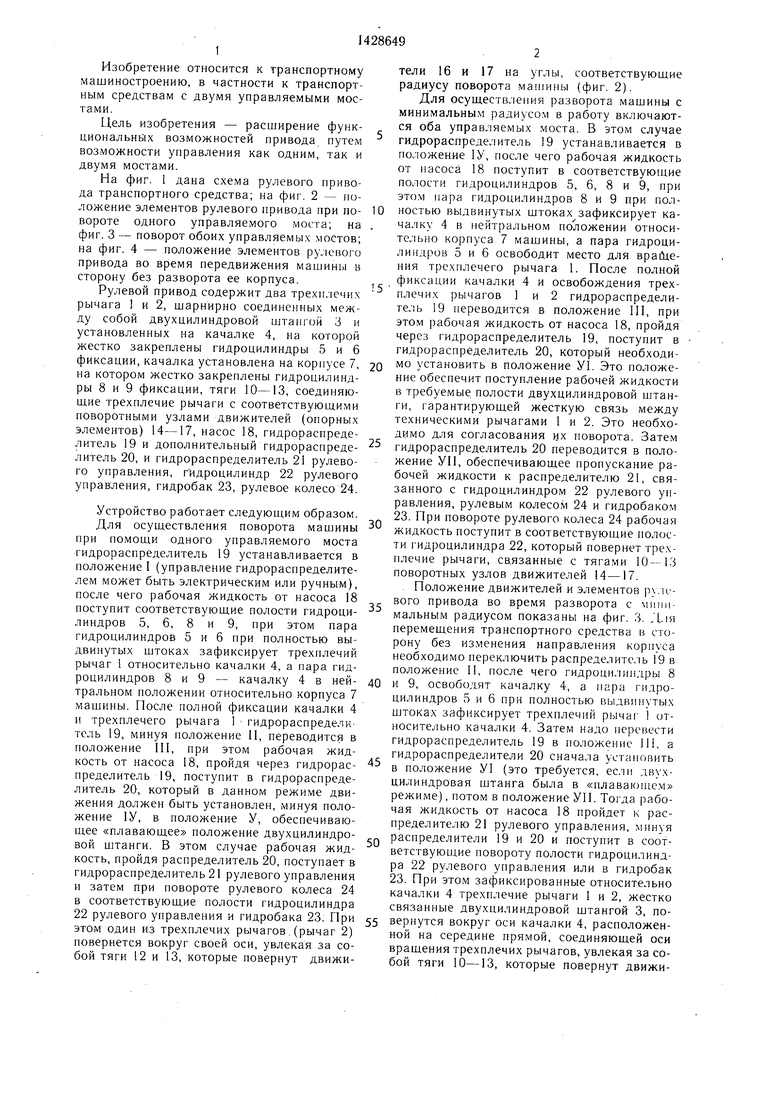
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод транспортного средства с несколькими управляемыми мостами | 1988 |
|
SU1518184A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1985 |
|
SU1281466A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| Рулевой привод транспортного средства с несколькими управляемыми мостами | 1988 |
|
SU1518185A1 |
| Шахтная самоходная машина | 2023 |
|
RU2825778C1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1988 |
|
SU1518186A1 |
| РУЛЕВОЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1993 |
|
RU2045435C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Устройство для управления колесами полу-пРицЕпНОй СЕльСКОХОзяйСТВЕННОй МАшиНы | 1979 |
|
SU821276A1 |
Изобретение относится к транспортному машиностроению, в частности к транспортным средствам с двумя управляемыми мостами. Цель изобретения - расширение функциональных возможностей привода путем возможности управления как одним, так и двумя мостами. Рулевой привод содержит два трехплечих рычага 1, 2, которые соединены между собой двухцилиндровой штангой 3 и установлены на качалке 4. Трех- плечие рычаги могут фиксироваться в нейтральном положении относительно качалки одной парой гидроцилиндров фиксации, а качалка может фиксироваться в нейтральном положении относительно корпуса 7 другой парой. Тяги 10, 11, 12, 13 соединяют трех- плечие рычаги с поворотными узлами двигателей 14, 15, 16, 17. Управление движителей осуществляется с помощью гидроцилиндра 22 рулевого управления, гидравлически соединенного с гидрораспределителем рулевого управления, дополнительными гидрораспределителями 19, 20, насосом 18 и гидробаком 23. 4 ил. I СО
(Piie.2
(Риг.З
/О-/
13 /
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1985 |
|
SU1281466A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
