i
(Л
i.pijbcv, f ,i,fjp;K T два трехплечих рычага 1 и 2, которые соединены между собой двухцилиндровой штангой 3 и установлены на качалке 4. Трехплечие рычзг могут фиксироваться в нейтральном положении относительно корпуса 7 другой парой. Тяги 10 - 13 соединяют трехплечие рычаги с поворотными узла1 и 26-25, 22 - 25 (в данном варианте всего четыре моста). При поворотах машины повернутые поворотные узлы Б предлагаемой схеме
устанавливаются с наибольшим плечом, а при перемещении транспортного средства в сторону без изменения направления корпуса они устанавливаются с наименьшим плечом. Управление движителями осуществляется с помощью гидроцилиндра 44 рулевого управления, гидравлически соединенного с гидрораспределителем рулевого управления, дополнительными гидрораспределителями 39 и 40, гидронасосом 38 и гидробаком 42. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1987 |
|
SU1428649A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1985 |
|
SU1281466A1 |
| Рулевой привод транспортного средства с несколькими управляемыми мостами | 1988 |
|
SU1518185A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1988 |
|
SU1518186A1 |
| Шахтная самоходная машина | 2023 |
|
RU2825778C1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |

Изобретение относится к транспортному машиностроению. Цель изобретения - повышение эффективности работы путем обеспечения требуемой кинематики поворота управляемых мостов при любом их количестве. Рулевой привод содержит два трехплечих рычага 1 и 2, которые соединены между собой двухцилиндровой штангой 3 и установлены на качалке 4. Трехплечие рычаги могут фиксироваться в нейтральном положении относительно корпуса 7 другой парой. Тяги 10-13 соединяют трехплечие рычаги с поворотными узлами 26-29,22-25 (в данном варианте всего четыре моста). При поворотах машины повернутые поворотные узлы в предлагаемой схеме устанавливаются с наибольшим плечом, а при перемещении транспортного средства в сторону без изменения направления корпуса они устанавливаются с наименьшим плечом. Управление движителями осуществляется с помощью гидроцилиндра 44 рулевого управления, гидравлически соединенного с гидрораспределителем рулевого управления, дополнительными гидрораспределителями 39 и 40, гидронасосом 38 и гидробаком 42. 4 ил.
Изобретение относится к транспор
тному маши юстросншо, в частности к транспортньЕ средствам с несколькими управляемыми мостами.
Цель изобретения - повьш1ение эффективности работы за счет обеспече- иан требуемой кинематики поворота уп равляем1-лх мостов при jno6oM их количестве .
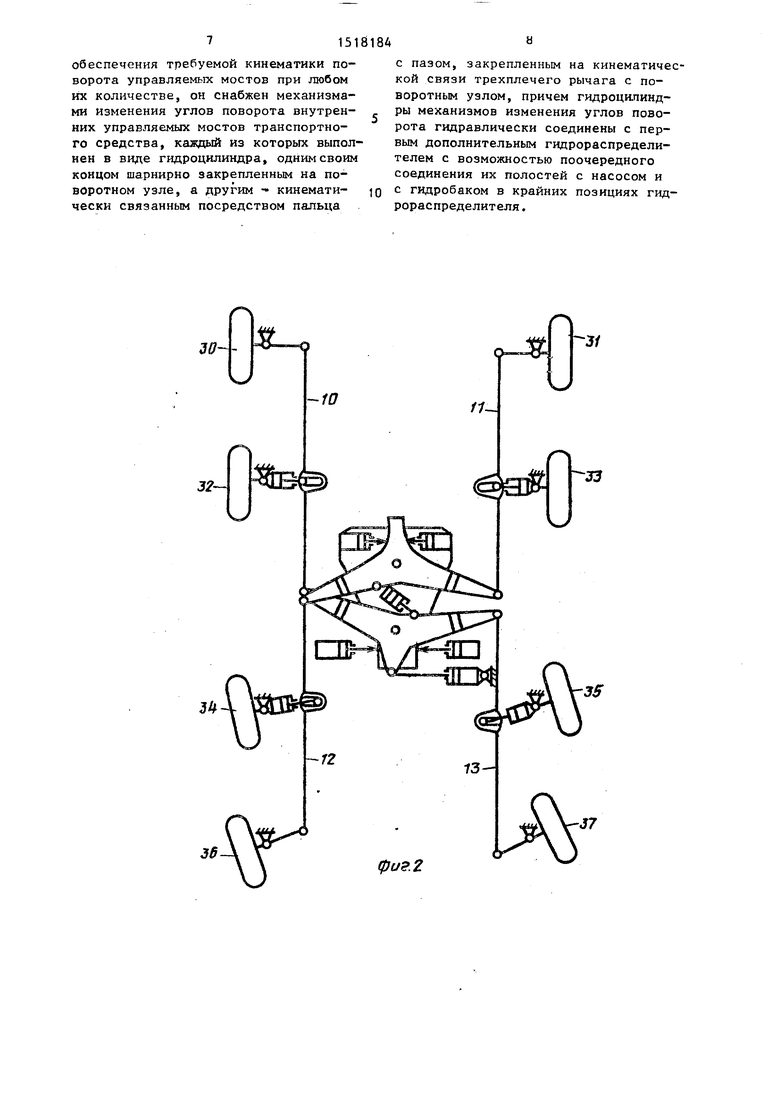
На фи1.1 изображена схема рулевого пр шода транспортного средства; на фиг.2 - положение элементов руле- Еого npi; j3o;fa при повороте двух мостов; на фиг.З - поворот всех управ- мостов; па фиг.4 - положение эле 1еитов рулевого привода во время передвижения в сторону без разворота ее корпуса.
Рулевой привод содер7кит два трехплечих рычага 1 и 2, шарнирно соеди- .ненньас между собой двухцилиндровой штангой 3 и установленных па качал- ке 4, па KOTOpoii жестко закреплены гидрощ линдры 5,6. Качалка уставов- лена па корпусе 7, на котором жестко закреплены гидроцилиндры 8 и 9. Тяги 10 - 13 с пазами 14 - 17, в ко- Topbix ходят штоки гидропплпндров 18 21 поворотных узлов 22 - 25; поворотные узлы 26 - 29; дви кители 30 - 37; насос 38, гидрораспредел -:тели 39, .О, гидрораспределитель 41 ру- левого у1 равле 1ия, гидробак 42-, ру- певое колесо , гидроцилиндр 44 рулевого управления.
Устройство работает следующим образов,
осу1цсствлекия поворота машины при помощи двух управляемых мостов 1 щрор; .спределнтель 39 устанавлива0
5
5
0 5 0
5
ется в положение А (управление гидрораспределителем может быть электрическим или ручным), после чего рабочая жидкость от насоса 38 поступает в соответствующие полости гидро- дилиндров 18, 19, 6, 5, 8, 9, 20, 21, при этом пара гидроцилиндров 18, 19 поворотных узлов 22, 23 зафик сиру- ется в положение наименьшего плеча, пара гидроцилиндров фиксации 6, 5 при полностью вьщвинутых штоках зафиксирует трехплечий рычаг 1 относительно качалки 4, а пара гидроцилиндров 8, 9 зафиксирует качалку 4 в нейтральном положении относительно корпуса 7 машины, гидроцилиндры 20, 21 при полностью выдвипутых штоках займут положение, обеспечивающее ма симальное плечо для поворотных узлов движителей 34, 35. После полной фиксации качалки 4 и трехплечего рычага 1, установки гидроцилиндров 18, 19, 20, 21 гидрораспределитель 39 устанавливается в положение С, при этом рабочая жидкость от насоса 38, пройдя через гидрораспределитель 39, поступит в гидрораспределитель 40, который в данном режиме движения должен быть установлен в поло- лсение Е, обеспечивающее плавающее положение двухцилиндровой штанги, и этом рабочая жидкость, пройдя гвдрораспределитель 40, поступает в гидрораспределитель 41 рулевого управления и затем при повороте рулевого колеса 43 - в соответствующие полости гидроцилиндра 44 рулево- ,го управления и гидробака 42. При этом один из трехплечих рычагов - рычаг 2 повернется вокруг своей оси увлекая за собой тяги 12, 13, кото 15
рые повернут движители ЗА, 35, 36, 37 на углы, соответствующие радиусу поворота машины (см. фиг.2).
Для осуществления разворота машины с мин1шальным радиусом в работу включаются все управляемые мосты. В этом случае гидрораспределитель 39 устанавливается в положение В, после чего рабочая жидкость от пасо- са 38 поступит в соответств 1ошие полости гидроцилиндроБ 18, 19, 20, 21, 5, 6, 8, 9, при этом гидроцилиндры 18 - 21 поворотных узлов 22 - 25 зафиксируются fe положении наиболт ше- го плеча,пара гидроцилиндроп фиксации 8, 9 при.полностью выдвинутых штоках зафиксирует качалку 4 в нейтральном положении относительно кп-;- пуса 7 машины, а пара гидроцил;.л:1; ров 5, о освободит место для вращения трехплечего рычага 1 . После r-os ной фиксации качалки 4 и освобо:::ле- ния трехплечих рычагов 1, 2 гипро- распределитель 39 перево/тп ся р; щ,,- ложение С, при этом рабо-тг -я ж, Д1;ость от насоса 38, пройдя через х идро ас- пределитель 39, поступит п гп/ рорас- пределитель 40, который устанаплива- ется в положение W, Это положение обеспечит поступление рабочей кости в требуемые полости пву- цтчт; ровой штанги, гарантир т;:цей -/--есткую связь между трехплечими рычс-.: 1, 2, что необходиг-ю для согласования их поворота. Затем гидрораспгеле.лл- тель ДО переводится в положетгг-е 3, обеспечивающее пропускание рабочей жидкости к гидрораспределителю 41, связанного с гидроцилиндром рулевого управления 44 с рулевьп колесом и гидробаком 42. При повороте рулевого коле.са 43 рабочая жидкость поступит, в соответствующие полости гидроцилиндра 44, который повернет трех плечие рычаги 1, 2, свя.гнные с тягами 10 - 13 поворотных узлов движителей 30 - 37.
Положение движителей и элементов конструкции во время разворота с минимальным радиусом показаны на фиг.З
Для перемещения транспортного средства без изменения направления корпуса необходимо переключить гид- рораспроделитель 39 в положение Д, после чего гидроцилиндры 8, 9 осво- бхздят качалку 4, а пара гидроцилиндров 5, 6 при полностью выдвинутых штоках зафиксирует трехплечий рычаг
81846
1 относительно качляки 4, гидроцп- линдры 18 - 21 займут положение, обеспечивающее минимальные плечи по , воротных узлов 22 25. Затем надо перевести т идрораспредг ллтель 39 в положение С, а пщрораспределитель 40 сначала установить в положение Ж (это требуется, если двухцилинд10 ровая штанга была в плавающем режиме), затем в положение 3. Тогда рабочая жидкость от насоса 38 пройдет к гидрораспределите.лю 41 рулевого управления чепез гил юраспредели15 тели 39, 40 и поступит в соответствующие повороту полости гидроцилиндра 44 руле.Бого управлеьгия или в гид- po6ai; 42. При этом зафиксированные отноглтельно качал- и 4 трохплечие
20 р -1чатл 1 и 2 жес1ко спяпаш. дБухци- лин1:гч)всй п;таН1 ой 3, Г 0 /;: р-уты ок- pvi- си ка ллт;м 4, рас1;олг : :пл1;ой на г(:ро1 чне , соелипявк сй ocvi праш.ония ,Т1еч: 1л рычаго;.). yr.-iei:;}:
25 собой тягм- 10, 11, 12, 13, кото- ib c повернут лп г ;ители 30 - 37 в одну сторону ifi рапнь е углы (см. фиг,4
Форм у :: а и з о б р с т с н н я
30 Гулевой привод транспортного сред ства с неско 1ькими упра ляе:;им11 мос- т;1ми, содержащи гидрор 1спределитель ру.|Чевого угфаьления, Г1-щравл чес:а1 соел-ииеиньш с насосом, гидробаком и
35 iл-;дрсцилиндрсм noBopoia, кинсгштичес ки связанным с механизмом лс ги рота, ьМ юлнинлгим Б виде двух трихплечих Г)Ь(11 л ов, уста1;овленных на качалке, ось :oTopoi: закреплена HI корпусе
40 и расположена на середине прямой, соеднняшщей оси вращения трехплечих рычагов, соединенных между собой двухцилиндровой штангой, а концы трехплечих рычагов кинематически свяд5 заны с поворотными узлами, гидроци- линдры фиксации трехплечих рычагов ,относительно качалки и гидроцилинд- PLI фиксации качалки относительно корпуса, гидравлически соединенные
5Q через пе рсый дополнительный гидрораспределитель с насосом и с гидробаком,, и второй дополнительный гид- рораспределмтель, гидравлическп соединенный с г 1дрораспределителем ру-г левого управления, первым дополнительным гидpopac peдeлитeлe и двухцилиндровой П1тангой, отличающий с я тем, что, с целью ния эффективности работы за счет
обеспечения требуемой кинематики поворота управляемых мостов при любом их количестве, он снабжен механизмами изменения углов поворота внутренних управляемых мостов транспортного средства, каядый из которых выполнен в виде гидроцилиндра, одним своим концом шарнирно закрепленным на поворотном узле, а другим - кинематически связанным посредством пальца
30-10
Л
36
U
с пазом, закрепленным на кинематической связи трехплечего рычага с поворотным узлом, причем гидроци-пинд- ры механизмов изменения углов поворота гидравлически соединены с первым дополнительным гидрораспределителем с возможностью поочередного соединения их полостей с насосом и с гидробаком в крайних позициях гидрораспределителя .
т
-Jf
11J7
фиг 2
J4
гу
3
г
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1987 |
|
SU1428649A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
