х2
:s
сл
эо
00
сд
/1
Из юретение относится к транспортному машиностроению, в частности к транспортным средствам с двумя уп- равпяемьтми мостами.
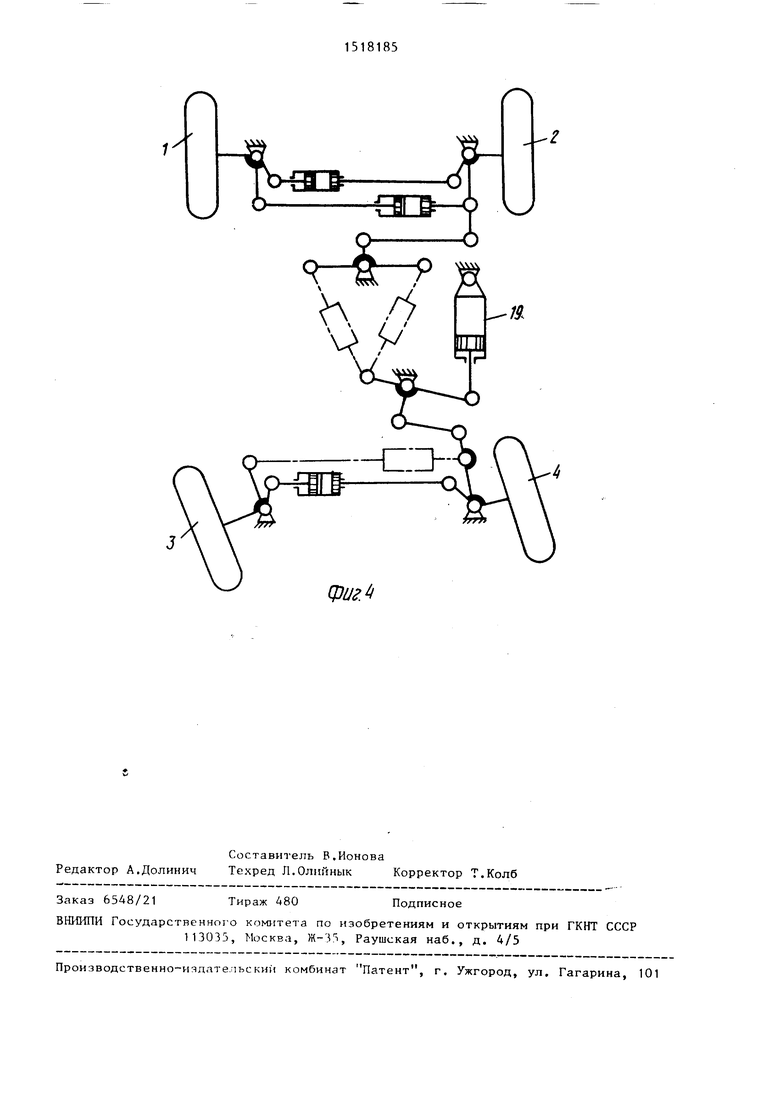
Цель изобретения - повьшение эф- фектииности работы привода за счет оГ сг.печения требуемой кинематики углов поворота управляемых мостов. На фиг,1 изображена схема транспортного средства при нейтральном положении элементов; на фиг.2 - по- ложеише элементов рулевого привода во вреггя поворота; на - то же, во время передвижения машины в сторону без изменения направления ее корпуса; на фиг.4 - то же, во время попг ротп ттрц гюмощи одно1 о моста. . Г Ипод содержит чет1з1ре 111-; Л1:П -:як 1 ч , с соответствующими поБорочньми узлами 5-8, связанны- ;и .Ji5y :iitf;i iir ,pntu:r-.;i иггангами 9 и 10 рулевых трапеций и дз5 хиилиндровыми штпяхами 11, 12 для параллельного П(1нг;рота двп.;чптепей, при этом мосты портного срсг. кинематически связаны между собой тягa ra 13, 14, т е::кическт:м : качалками 15, 16, через две двухци;п1ндровые штанги 17, 18, управд-еиме осушсствляется при помощи гп, ;ро1г, 19 рулевого управле иия Устрсйстпо работает следующим образом.
jL iH ос шествления поворота машины при помош.и д7 ухуправляемых мос- гов лвухдилмн. штанги 9, Ю и 1о необходимо жестко зафиксировать Б не51тральном положении, а двухци- пиндр . птачги 11,, 12 и 17 устя- |- ОВИтч J пл - ваю зее положение. Тогда при управлении гидродилиндром 19 рулевого управления все движители 1 - 4 гранс юртпого средства повернутся la yiMii;, соответствующие повороту СфчгЛ; ,
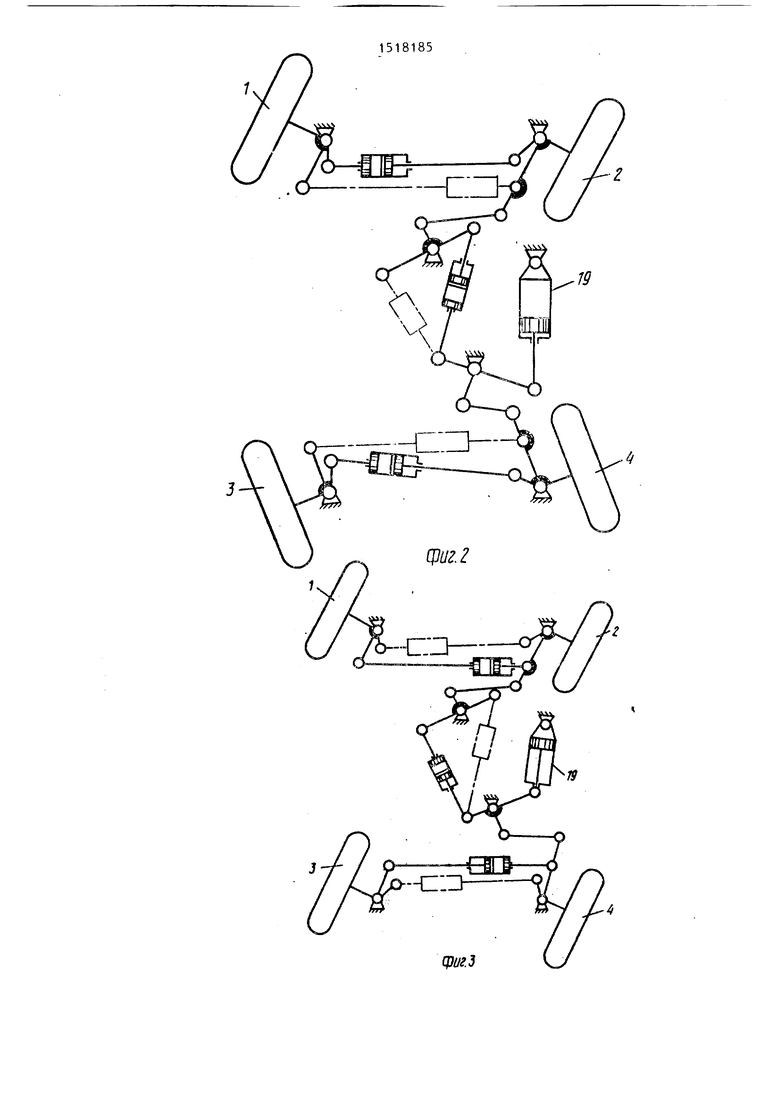
Пл:. осууп,ествлоп 1я движения в сто ,-;,;,v Осч пзмеисчия направления кор- , с а .. нро - опимо перевести лнухгп-мпшдродые штанги 9 и 18 в пл г п 1о:. сние, я двухцилиндровые штанги 11, 12 и 17 установить в требуемое положение и зафиксировать. При этом все движители 1 - 4 машины удут поворачиваться в одну сторону I ;на равные углы (см. фиг.З),
Скоростные режимы работы транспортного средства требуют управления одним мостом. Для этого водителю
необходимо установить двухцилиндровые штанги 9, 10 и 11 в нейтральном положении и зафиксировать их. Остальные дву :цилиндровые штанги 12, 17 и 18 перевести в плавающее положение. Следует отметить, что жесткая фиксация щтанг 9 и 11 гарантирует отсутствие самопроизвольного разворота соответствующего им моста.
20
Формула изобретения
Рулевой привод транспортного средства с несколькими управляемьми мостами, содержащий рулевые трапеции переднего и заднего управляемых мостов, связанные между собой механизмом изменения взаимного направления поворота управляемых мостов и связанные также с гидроцилиндром поворота рулевого управления, отличающийся тем, что, г. целью повышения эффективности работы привода за счет обеспечения требуемой кинематики углов поворота управляемых мостов, он снабжен дополнительными механиз- поворота для каждой из рулевых трапеций, каждый из которых выполнен в виде шарнирно связанных между собой трех звеньев, два боковых звена которого, расположенные параллельно друг другу в нейтральном положении управляемых мостов, жестко соединены с поперечными тягами рулевой трапеции, а в центральное звено вмонтирована двухцилиндровая штанга с возможностью изменения длины центрального звена, и дополнительными двухцилиндровыми штангами, вмонтированными в продольные тяги каждой из упомянутых рулевых трапеций.
1518185
(риг.З
Фиг.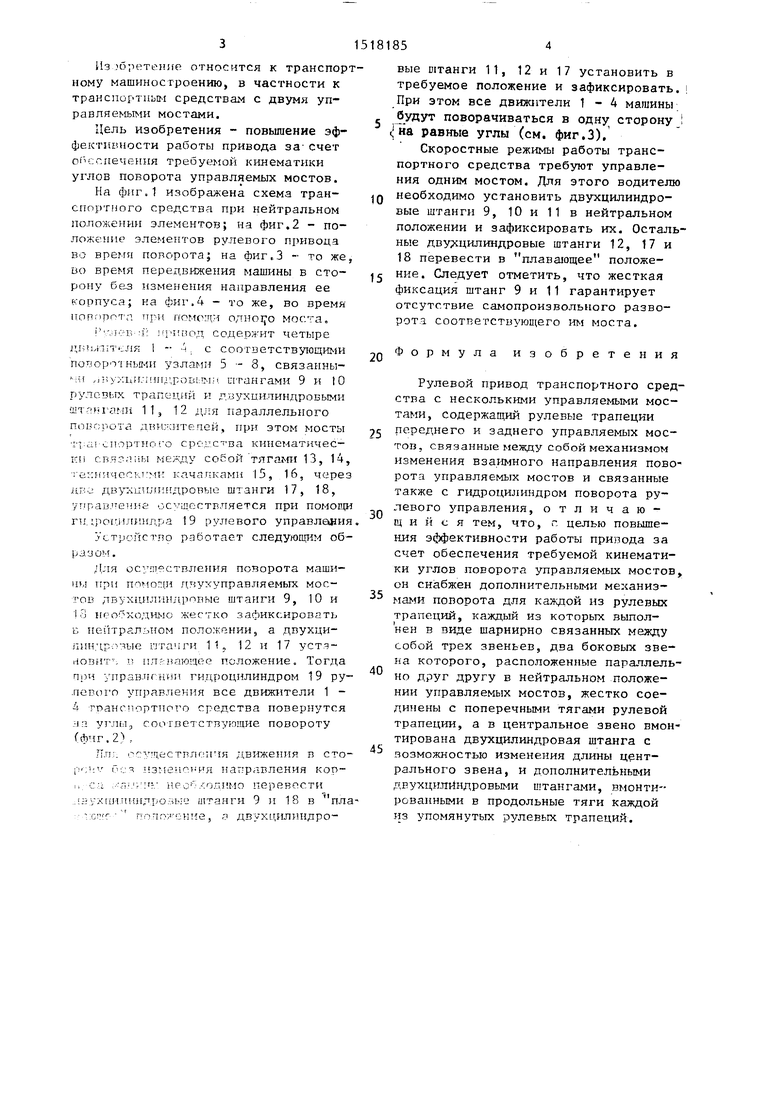
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод транспортного средства с несколькими управляемыми мостами | 1988 |
|
SU1518184A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1987 |
|
SU1428649A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1988 |
|
SU1518186A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1985 |
|
SU1281466A1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Рулевое управление крутосклонного транспортного средства | 1983 |
|
SU1126484A1 |
| МЕХАНИЗМ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ЗАПАЗДЫВАНИЕМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ЗАДНЕГО МОСТА С ЕГО ИСПОЛЬЗОВАНИЕМ | 2017 |
|
RU2657163C1 |
| Устройство поворота управляемых колес транспортного средства | 1988 |
|
SU1544625A1 |
Изобретение относится к транспортному машиностроению. Цель изобретения - повышение эффективности работы привода за счет обеспечения требуемой кинематики углов поворота управляемых мостов. Рулевой привод содержит четыре движителя 1-4 с соответствующими поворотными узлами 5-8, связанными двухцилиндровыми штангами 9 и 10 рулевых трапеций и двухцилиндровыми штангами 11 и 12 для параллельного поворота движителей. При этом мосты транспортного средства кинематически связаны между собой тягами 13 и 14, трехплечими качалками 15 и 16 через две двухцилиндровые штанги 18 и 17. В зависимости от выбранного способа поворота фиксируются двухцилиндровые штанги 9,10 или 11,12 и поворот происходит при необходимом соответствии узлов управляемых мостов. 4 ил.
Редактор А.Долинич
Составитель В.Ионова
Техред Л.Олийнык Корректор Т.Колб
Заказ 6548/21
Тираж 480
ВНЮ-ШИ Государственног о комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-ЗЗ, Раушская наб., д. 4/5
Производственно- иядательский комбинат Патент, г. Ужгород, ул, Гагарина, 101
Подписное
| Система рулевого управления транспортного средства | 1985 |
|
SU1252230A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
