3 5 J4 2 6 39
/ / / / / / /
&
(Л
управления через электромагнит (Э). МН содержит груз (Г) 8, фиксатор его положения, регулируемый упор 25, контакт 11 и привод его перемещения, имеет ударник 43, приводимый в действие собачкой (С) 42, которая управляется штоком 46, связанным с Э. При калибровке контактную пружину нагружают Г 8, фиксируют положение Г 8, перемещают его на величину провала контактов. При помощи УУ 39 деформируют панель до изменения состояния контактов 11, 12, после чего Э, воздействуя штоком на С 42, останавливает действие УУ 39. 2 з.п. ф-лы, 5 ил.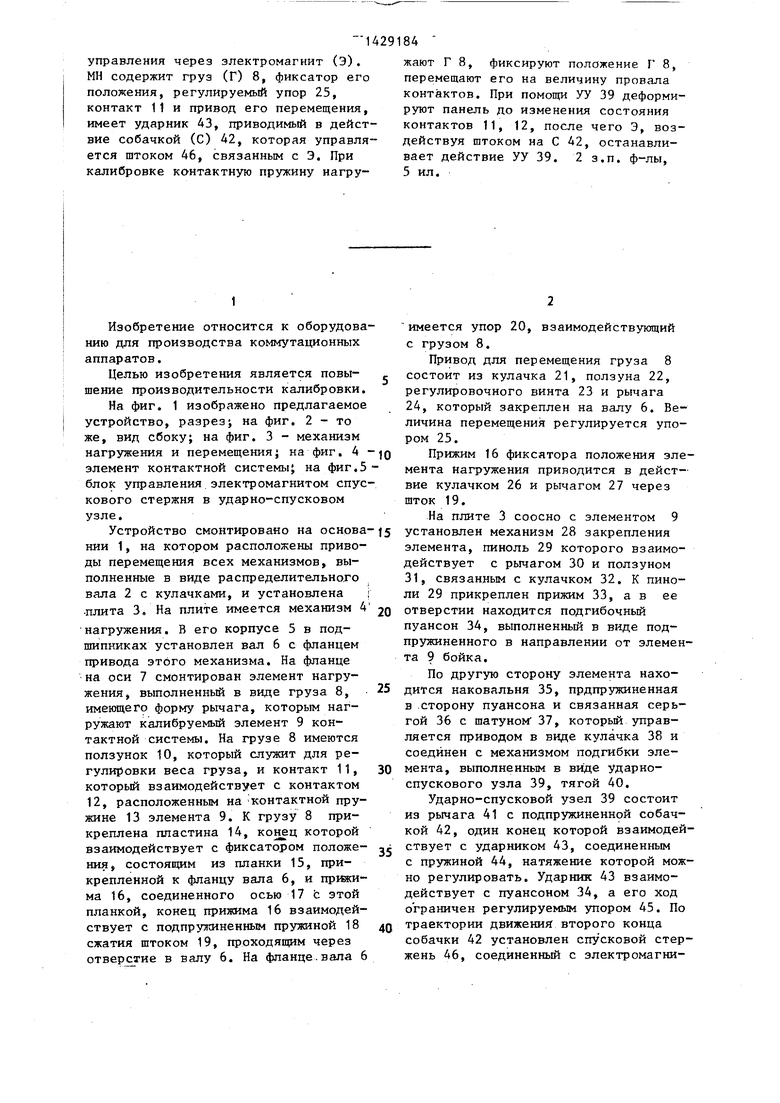


| название | год | авторы | номер документа |
|---|---|---|---|
| Цепевязальный автомат | 1979 |
|
SU1022396A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Устройство для загибания концов крепежных элементов | 1981 |
|
SU961948A1 |
| РЕПЕРФОРАТОР ДЛЯ МНОГОКРАТНЫХ ТЕЛЕГРАФНЫХ АППАРАТОВ | 1937 |
|
SU61168A1 |
| Ручной инструмент ударного действия | 1982 |
|
SU1024262A1 |
| МНОГОПОЗ.ИЦИОННЫЙ ПОЛУАВТОМАТ для ПЕРФОРАЦИИПЛАСТИН | 1968 |
|
SU221642A1 |
| Устройство для гашения гидравлических ударов | 1982 |
|
SU1065652A1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Устройство для получения гофрированных деталей из ленты | 1971 |
|
SU436687A1 |
| ПИСТОЛЕТ С ПОДВИЖНЫМ СТВОЛОМ | 2006 |
|
RU2355987C2 |
Изобретение относится к оборудованию для производства коммутационных аппаратов. Цель изобретения - повышение производительности операции калибровки. Устройство содержит смонтированные на основании 1 и приводимые от кулачков распределительного вала 2 механизм нагружения (МН) 4, механизм закрепления элемента и ударный узел (УУ), управляемый-блоком
1
Изобретение относится к оборудованию для производства коммутационных аппаратов.
Целью изобретения является повы- шение производительности калибровки.
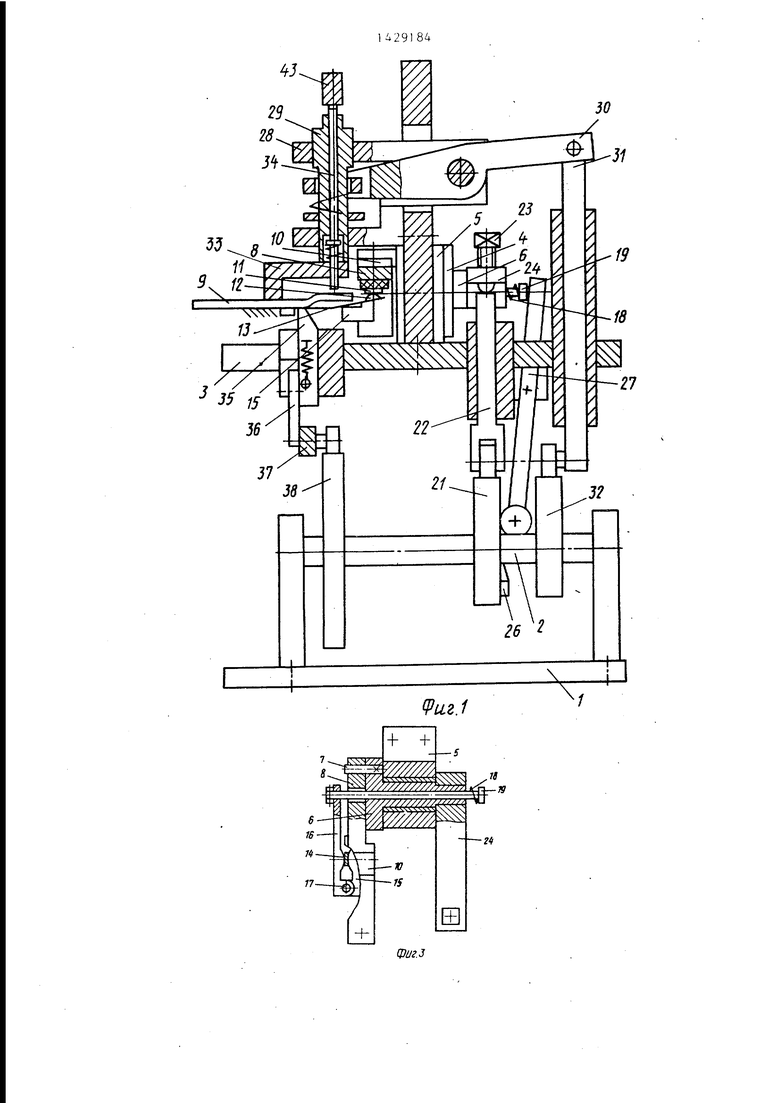
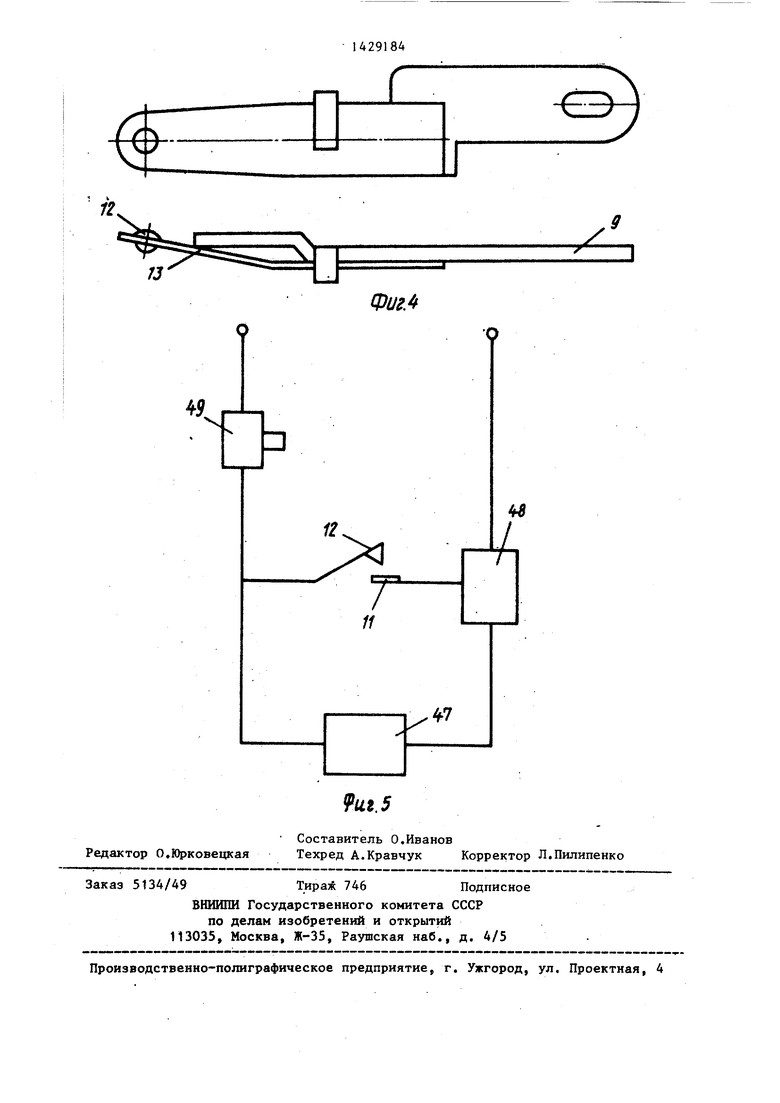
На фиг. 1 изображено предлагаемое устройство, разрезJ на фиг. 2 - то же, вид сбоку; на фиг. 3 - механизм нагружения и перемещения} на фиг. 4 элемент контактной системы; на фиг.5 блок управления электромагнитом спускового стержня в ударно-спусковом узле.
Устройство смонтировано на основаНИИ 1, на котором расположены приводы перемещения всех механизмов, выполненные в виде распределительного вала 2 с кулачками, и установлена i -плита 3. На плите имеется механизм 4
нагружения. В его корпусе 5 в подшипниках установлен вал 6 с фланцем привода этого механизма. На фланце на оси 7 смонтирован элемент нагружения, выполненный в виде груза 8, имеющего форму рычага, которым нагружают калибруемый элемент 9 контактной системы. На грузе 8 имеются ползунок 10, который служит для регулировки веса груза, и контакт 11, который взаимодействует с контактом 12, расположенным на контактной пружине 13 элемента 9. К грузу 8 прикреплена пластина 14, конец которой взаимодействует с фиксатором положе- ния, состоящим из планки 15, прикрепленной к фланцу вала 6, и пркки- ма 16, соединенного осью 17 t этой планкой, конец прижима 16 взаимодействует с подпружиненным пружиной 18 сжатия штоком 19, проходящим через отверстие в валу 6. На фланце.вала 6
имеется упор 20, взаимодействующий с грузом 8.
Привод для перемещения груза 8 состоит из кулачка 21, ползуна 22, регулировочного винта 23 и рычага 24, который закреплен на валу 6. Величина перемещения регулируется упором 25.
Прижим 16 фиксатора положения элемента нагружения приводится в действие кулачком 26 и рычагом 27 через шток 19.
На плите 3 соосно с элементом 9 установлен механизм 28 закрепления элемента, пиноль 29 которого взаимодействует с рычагом 30 и ползуном 31, связанным с кулачком 32. К пино- ли 29 прикреплен прижим 33, а в ее отверстии находится подгибочньй пуансон 34, выполненный в виде подпружиненного в направлении от элемента 9 бойка.
По другую сторону элемента находится наковальня 35, прдпружиненная в сторону пуансона и связанная серьгой 36 с шатуном 37, которьй управляется приводом в виде кулачка 38 и соединен с механизмом подгибки элемента, выполненным в виде ударно- спускового узла 39, тягой 40.
Ударно-спусковой узел 39 состоит из рычага 41 с подпружиненной собачкой 42, один конец которой взаимодействует с ударником 43, соединенным с пружиной 44, натяжение которой можно регулировать. Ударник 43 взаимодействует с пуансоном 34, а его ход ограничен регулируемым упором 45. По траектории движения второго конца собачки 42 установлен спусковой стержень 46, соединенный с электромагнитом А7, входящим в блок управления, содержащий датчик 48 состояния контактов 11 и 12, связанных с этим датчиком электрически, и концевой выключатель 49, который включается шатуном 37. .
Устройство имеет также кулачок (не показан), включающий в работу различные элементы блока управления в зависимости от цикла .работы устройства.
Контактная пружина 13 с контактом 12 прикреплена к элементу 9 так, что
в нее упирается конец элемента, что создает в пружине 13 некоторое предварительное усилие. При полном кон- тактном давлении контактная пружина не соприкасается с концом элемента 9 поэтому он не влияет на контактное давление, создаваемое пружиной 13. Подгибка конца элемента позволяет регулировать величину перемещения контакта от момента замыкания (контактное давление близко к 0) до развития им требуемого контактного давления, т.е. калибровать величину провала контактов при заданном контактном давлении.
Устройство работает следующим образом.
Элемент контактной системы подается в позицию калибровки (например, револьверным диском).
От кулачка 32 приводится в движение пиноль 29, и прикрепленный к ней прижим 33 фиксирует положение элемента в тех местах, в которых она фиксируется в коммутационном аппарате.
Затем от кулачка 21 и пружины (не показана) поворачивается вал 6, угол поворота которого ограничивается упором 25. При этом находящийся на грузе контакт 11 воздействует на кон такт 12 контактной пружины 13 с усилием, равным требуемому контактному давлению. Усилие давления в устройстве задается весом груза 8 и положением ползунка 10.Контактная пружина 13 под действием этого давления прогибается, и груз 8 занимает определенное положение, соответствующее нагруженному состоянию контактной пружины 13.
Затем от кулачка 26 освобождается пружина 18 и под действием ее силы шток 19 прижимает прижим .16 к планке 15 и фиксирует положение находящейся
0
5
0
0
5
g в
между ними пластины 14, которая закреплена на грузе В, относительно фланца вала 6. После этого от кулачка 21 вал 6 поворачивается в противоположном направлении на строго определенную величину, которая может регулироваться положением упора 25.
Элемент 9 собирают с контактной пружиной 13 так, чтобы величина провала контактов перед калибровкой была заведомо больше требуемой. Поэтому после выполнения указанньрс действий контакты 11 и 12 должны находиться в замкнутом состоянии.
В этот момент времени включается блок управления.
Кулачок 38 приводит в действие шатун 37, который через серьгу 36 освобождает наковальню 35, и она под действием пружины, усилие которой подбирают таким, чтобы не вызвать в элементе остаточных деформаций, прижимается в элементу 9. Одновременно 5 через тягу 40 приводится в движение рычаг 41, который своей собачкой 42 заводит ударник 43.
В конце хода рычага 41 конец собач- ки 42 упирается в спусковой стержень 46 и собачка 42, поворачиваясь, освобождает ударник 43, который под действием пружины 44 опускается до упора 45 и ударяет в подгибочный пуансон 34. Последний набирает скорость и ударяет в конец .элемента 9, подгибая его на незначительную величину. После этого шатун 37 идет в обратном направлении, отводит наковальню 35 от элемента 9 и приводит собачку 42 в зацепление с ударником 43. В конце обратного хода он нажимает кнопку концевого выключателя 49, которьй дает команду на определение состояния контактов 11 и 12, на которые
этот момент не действуют механизмы устройства, принимающие участие в калибровке.
Приведенный процесс подгибания , повторяется до тех пор, пока контакты 11 и 12 в момент нажатия кнопки концевого выключателя 49 не окажутся разомкнутыми. (Для повторения этого процесса на кулачке 38 имеется достаточное количество впадин).
При разомкнутых контактах 11 и 12 датчик 48 состояния контактов дает команду на включение элекромагнита 47, который отводит спусковой стержень 46 от собачки 42.
0
0
5
После этого ударник 43 не выходит 3 зацепления с собачкой 42 и плавно Качается, а подгибочный пуансон 34 не достает до элемента 9. I После окончания цикла все механиз- 1 возвращаются в исходное положение, 8 поднимается упором 20 и устройство готово для повторного выпол- ения цикла работ.
I Использование устройства позволяет автоматизировать калибровку провала контактов элемента контактной систе- 11Ы и значительно повысить производительность и точность калибровки.
формула из обре тения
I 1. Устройство для калибровки эле- iieHTa контактной системы коммутационного аппарата по величине провала Контакта, содержащее механизм закрепления элемента, механизм нагруже- ния с элементом нагружения, механизм одгибки элемента, отличаю- щ е е с я тем, что, с целью повышения производ ительности калибровки, механизм нагружения снабжен приводом фиксатором положения и регулируемым упором, установленным с возможностью взаимодействия с приводом, механизм подгибки элемента снабжен ударным узлом и блоком управления, причем ударный узел снабжен подпружиненной собачкой.f и спусковым стержнем, который установлен с возможностью зацеп- ления с указанной собачкой, а блок управления снабжен контактом, датчиком состояния контактов, электромаг-
j
0
5
5
0
0
нитом и концевьм выключателем, контакт блока предназначен для образования с калибруемым элементом управляющей контактной пары, которая соединена одним выводом с концевьпч вык- лючателем и с одним из выводов обмотки электромагнита, причем указанный спусковой стержень ударного узла механизма подгибки элемента соединен с якорем электромагнита блока управления.
расположен мезвду прижимом и планкой. I
на фланце вала привода механизма нагружения, на котором закреплен груз, имеющий возможность взаимодействия с дополнительным упором, установленным на фланце вала привода механизма нагружения, причем контакт блока управления, образующий с калибруемым элементом управляющую контактную пару, установлен на грузе.
4J
30
31
f9
18
/J
Фиг A
| Способ регулировки контактных нажатий контактных пружин электромагнитного реле и устройство для его осуществления | 1976 |
|
SU675464A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ настройки усилия контактных пружин и устройство для его осуществления | 1980 |
|
SU936076A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КАТАЛИТИЧЕСКАЯ СИСТЕМА ТРИМЕРИЗАЦИИ ЭТИЛЕНА В 1-ГЕКСЕН | 2014 |
|
RU2549897C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
