Известны ленточные дозаторы для сыпучих грузов с регулятором косвенного действия.
Однако известные дозаторы не обеспечивают постоянство производительности в течение малого промежутка времени (1-2 сек).
Вследствие запаздывания процесса регулирования последнее прекращается уже по истечении некоторого времени после того, как производительность питателя достигает заданной величины. Поэтому отклонение загрузки транспортера от нормы может приводить к периодическим незатухающим колебаниям производительности питателя, а следовательно, и дозатора. В течение времени одного периода колебаний отклонения производительности ленточного дозатора могут быть весьма значительными, несмотря на то, что частичная или полная компенсация колебаний за более длительные промежутки времени обеспечивает производительность дозатора, близкую к заданной.
Уменьшение величины запаздывания регулирования путем уменьшения длины транспортера или увеличением скорости движения ленты практически затруднено.
Описываемое изобретение имеет целью регулирование производительности ленточного дозатора. Это достигается тем, что в цепь управления привода дозатора включен регулятор, с помощью которого непрерывно или дискретно на основе сигнала, пропорционального весу материала на ленте транспортера в данный момент, и сигнала, пропорционального производительности дозатора за малый промежуток времени, вычисляется значение существуюшей производительности дозатора в данный момент и разность между существующей и заданной производительностью. На основе полученного рассогласования регулятор отрабатывает сигнал управления дозатором.
№ 142933,- 2 Сигнал, пропорциональный производительпости дозатора в данный промежуток времени, записывают на магнитной ленте.
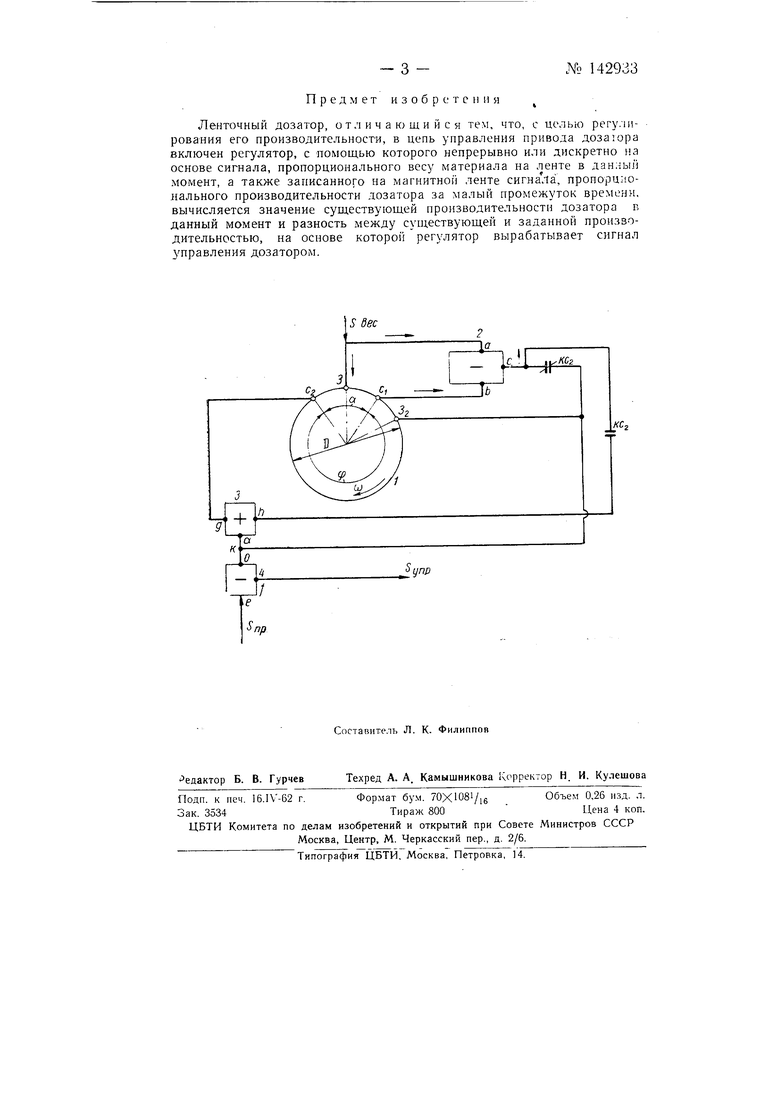
На чертеже изображена структурная схема регулятора предлагаемого ленточного дозатора.
Весовой ленточный транспортер снабжен весами высокой чувствительности. С, платформой весов связан реостатный датчик веса создающий сигнал 5 вес., пропорциональный весу материала на ленте транспортера в данный момент времени t. Этот сигнал одновременно поступает на магнитую ленту записи /, движение которой синхронизировано с движением ленты транспортера, и далее в блок вычитания 2. В этот же блок подается сигнал, считанной головкой Ci, пропорциональный весу материала в момент времени (t-Д. На выходе :из блока вычитания 2 образуется сигнал S с пропорциональной производительности дозатора в течение времени А.
Регулятор должен обеспечивать считывание сигнала, .пропорционального производительности дозатора за период времени т, необходимого для прохода перемещаемого материала по транспортеру дозатора.
В начальный период времени сигнал 5с через нормально замкнутый контакт поступает на головку записи 2 и в блок вычитания 4. В этом блоке сигнал Sc сравнивается с сигналом 8„„ , т. е. с заданной производительностью. Разность сигналов Sc - S,, пропорциональна отклонению производительности дозатора от заданной и используется, в качестве сигнала управления 5у„р.
В следующий период времени нормально замкнутый контакт КС размыкается, но замыкается контакт КС нормально разомкнутый, через который сигнал Sc из блока вычитания 2 поступает в блок суммирования 3. В этот же блок поступает считанный с ленты головкой С сигнал S, пропорциональной производительности дозатора в момент времени t - т. На выходе из суммирующего блока образуется сигнал Sa, пропорциональный производительности дозатора за время т, который в дальнейшем поступает на головку записи 2, блок вычитания 4, на выходе которого снова получается сигнал, пропорциональный отклонению производительности дозатора от заданной для времени t т.
Сигнал управления Зу„р используется для подачи команды на уменьшение или увеличение производительности.
Так как устранение отклонения производительности дозатора от заданной зависит только от инерции питателя, то применение малоинсрционных, например, электромагнитных вибропитателей, позволит поддерживать заданпую производительность в пределах малых отрезков времени (до 1 сек).
Конструкции датчиков, блоков суммирования и вычитания, аппаратуры управления и задающих устройств в каждом конкретном случае могут быть различными. В частности, могут быть использованы магнитные усилители, триггерные сумматоры, счетчики импульсов, блокинг-генераторы и другие средства автоматики.
Ленточный дозатор, согласно описываемому изобретению, позволяет сравнивать производительность в данный момент времени с заданной производительностью при любой длине весового транспортера и любой скорости движения его ленты, исключая возможность перерегулирования при временных отклонениях загрузки транспортера от нормы.
Поэтому предлагаемый ленточный дозатор может быть использован при разработке оборудования для дозирования сыпучих материалов.
Предмет изобретения
Ленточный дозатор, отличающийся тем, что, с целью регули.рования его производительности, в цепь управления привода доза юра включен регулятор, с помощью которого непрерывно или дискретно на основе сигнала, пропорционального весу материала на ленте в данлыл момент, а также записанного на магнитной ленте сигнала, пропорционального производительности дозатора за малый промежуток времени, вычисляется значение существующей производительности дозатора в данный момент и разность между сунхествующей и заданной производительностью, на основе которой регулятор вырабатывает сигнал Зправления дозатором.
о
№ 142933
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕПРЕРЫВНОГО ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧЕГО МАТЕРИАЛА ЛЕНТОЧНЫМ ДОЗАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504741C2 |
| ПОТОЧНЫЙ РАСХОДОМЕР-ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2012 |
|
RU2509986C2 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2242273C1 |
| Устройство управления весовым дозатором | 1977 |
|
SU673993A1 |
| ВЕСОВОЙ ДОЗАТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1972 |
|
SU344285A1 |
| Дозатор непрерывного действия | 1980 |
|
SU934234A1 |
| Дозатор сыпучих материалов | 1988 |
|
SU1571413A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
S вес
