Изобретение относится к промышленной автоматике и робототехнике и может быть использовано при создании гибких автоматизированных производств для ориентации преимущественно ящикотары на конвейерах.
Целью изобретения является расширение функциональных возможностей путем улучшения ориентации изделий.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - диаграмма работы; на фиг. 3 - установка линейки фотодатчиков и расчет выбора их числа.
Устройство содержит конвейер 1, датчики 2 излучения, электроприводы 3 и 4, задат- чик 5 скорости электропривода, первый 6 и второй 7 сумматоры, ленты 8 и 9 с механизмами натяжения 10 и перемещения И, первый фотодатчик 12, линейку 13 фотодатчиков, емкостные реле 14 и 15 с датчиками 16 и 17, триггер 18, второй 19, третий 20, четвертый 21 и пятый 22 элементы совпадения, второй элемент И-НЕ 23, первый элемент И-НЕ 24, первый элемент 25 совпадения, одновибратор 26, третий сумматор 27, блок 28 хранения, первый 29 и второй 30 ключи, опоры 31 и 32 с датчиками 33. Позициями 34 и 35 обозначены части ленты транспортера.
Устройство работает следующим образом.
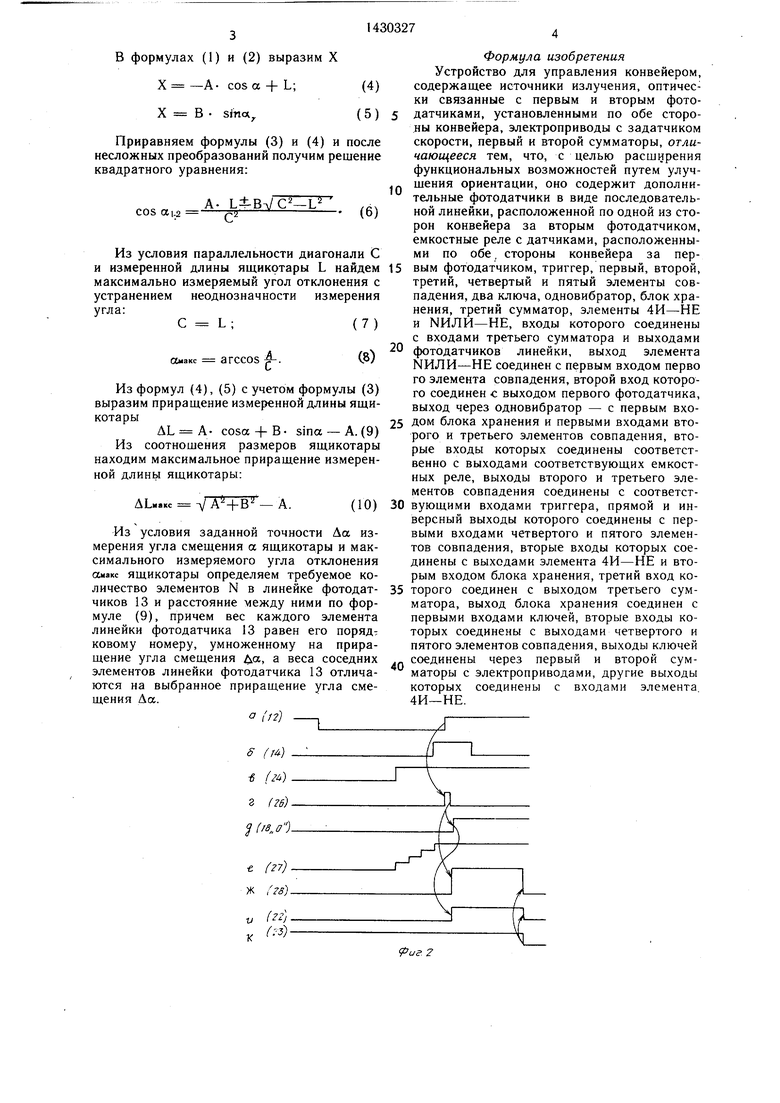
Конвейером 1 перемещается неориентированная ящикотара (фиг. I). При прохождении ящикотары вдоль системы фотодатчиков 12, 13 и датчиков 16, 17 емкостных реле определяется положение продольной координаты ящикотары относительно продольной осевой координаты конвейера 1. Фотодатчиками 12, 13 с источниками 2 излучения, сумматором 27 и блоком 28 хранения по измеренному приращению длины ящикотары по отношению к длине последней в ориентированном положении определяется угол смещения продольной координаты ящикотары относительно продоль ной координаты конвейера 1, что и определяет приращение скорости одного из приводов 3, 4. Для этого расстояние между фотодатчиком 12 и первым элементом линейки 13 фотодатчиков выбрано равным длине ящикотары (фиг. 3), а расстояния между элемента.ми линейки фотодатчика 13 рассчитываются из условия линейной зависимости а(ДЬ) угла поворота от приращения измеренной длины ящикотары.
Направление разворота ящикотары и соответственно выбор привода, которому необходимо приращение скорости, определяется с помощью емкостных реле 14, 15 и их датчиков 16, 17 установкой триггера 18.
При появлении тары в зоне фотодиода 12 с него на первый элемент 25 совпадения поступает нулевой логический уровень и включаются приводы 3, 4 со скоростью, определяемой задатчиком 5 скорости и равной скорости конвейера (не показано). При вхождении ящикотары в зону линейки фотодатчиков 13 начинает работать сумматор 27 (фиг. 2е) и на второй вход первого элемента 25 совпадения поступает разрешающий положительный потенциал с первой схемы 24 ИЛИ-НЕ (фиг. 2 в). В это ж.е время устанавливается в единичное состояние емкостное реле 14 (фиг. 26), так как задний край ящикотары развернут в его сторону. При прохож дении ящикотары фотодатчика 12 на второй вход первого элемента 25 совпадения поступает положительный потенциал, который запускает одновибратор 26 (фиг. 2 г), выходной сигнал которого через второй 19 и тре5 тий 20 элементы совпадения разрешает емкостным реле 14 и 15 установить триггер 18 в единичное или нулевое состояние (в данном случае в нулевое), который через элементы 21 и 22 совпадения управляет прохождением выходного сигнала блока 28 хра0 нения через ключи 29 и 30 (фиг. 2 и) на сумматоры 6 и 7. На вторые входы последнего подается управляющий сигнал от задатчика 5 скорости, а выходные сигналы поступают на исполнительные электро5 приводы 3 и 4 (в данном случае сигнал через ключ 30 поступает на сумматор 7 и далее на электропривод 4, увеличивая линейную скорость замкнутой ленты 9).
По выходному сигналу одновибратора 26 производится также фиксация результата
0 сумматора 27 в блоке 28 хранения. После того, как ящикотара будет втянута в ориентирующее устройство сработают тактильные датчики 33, установленные на опорах 31 и 32, и нулевой потенциал элемента 23 И-НЕ (фиг. 2 /с) запретит про5 хождение выходного сигнала блока 28 хранения через ключи 29 и 30 сбросит в нулевое состояние блок 28 хранения и с задержкой, равной времени выхода ящикотары из ориентирующего устройства (не показано), выключит приводы 3 и 4.
При расчете расстояний между элементами линейки фо -одатчика воспользуемся фиг. 3.
На фиг. 3 видно, что
-X
А
cosoc;
(1)
50
Х В
sind.
(2)
где а - угол смещения; А - длина ящикотары; В - щирина ящикотары; С - длина диагонали ящикотары; AL - измеренное приращение длины ящикотары
L А + AL.
(3)
В формулах (1) и (2) выразим X
Х -А- cos а + L;(4)
X В . ( 5 )
Приравняем формулы (3) и (4) и после несложных преобразованнй получнм решение квадратного уравнения:
А. L4 BVC -L ,«. cos ai.2 (6)
Из условия параллельности диагонали С и измеренной длины ящикртары L найдем максимально измеряемый угол отклонения с устранением неоднозначности измерения
угла:
С L;(7)
омакс arccos
f
Из формул (4), (5) с учетом формулы (3) выразим приращение измеренной длины ящи- котары
ДЬ А- cosa + B- sina - А. (9)
Из соотношения размеров ящикотары находим максимальное прираш.ение измеренной длинь яш,икотары:
ДЬ.кс VA +B - А.
Из условия заданной точности Да измерения угла смещения а ящикотары и максимального измеряемого угла отклонения ссиакс ящикотары определяем требуемое количество элементов N в линейке фотодатчиков 13 и расстояние между ними по формуле (9), причем вес каждого элемента линейки фотодатчика 13 равен его порядт ковому номеру, умноженному на приращение угла смещения Да, а веса соседних элементов линейки фотодатчика 13 отличаются на выбранное приращение угла смещения Да.
-,
Формула изобретения Устройство для управления конвейером, содержащее источники излучения, оптически связанные с первым и вторым фото5 датчиками, установленными по обе стороны конвейера, электроприводы с задатчиком скорости, первый и второй сумматоры, отличающееся тем, что, с целью расширения функциональных возможностей путем улуч.- шения ориентации, оно содержит дополнительные фотодатчики в виде последовательной линейки, расположенной по одной из сторон конвейера за вторым фотодатчиком, емкостные реле с датчиками, расположенными по обе, стороны конвейера за пер15 вым фотодатчиком, триггер, первый, второй, третий, четвертый и пятый элементы совпадения, два ключа, одновибратор, блок хранения, третий сумматор, элементы 4И-НЕ и ЫИЛИ-НЕ, входы которого соединены с входами третьего сумматора и выходами
20 фотодатчиков линейки, выход элемента ЫИЛИ-НЕ соединен с первым входом перво го элемента совпадения, второй вход которого соединен с выходом первого фотодатчика, выход через одновибратор - с первым вхо25 дом блока хранения и первыми входами второго и третьего элементов совпадения, вторые входы которых соединены соответственно с выходами соответствующих емкостных реле, выходы второго и третьего элементов совпадения соединены с соответст30 вующими входами триггера, прямой и инверсный выходы которого соединены с первыми входами четвертого и пятого элементов совпадения, вторые входы которых соединены с выходами элемента 4И-НЕ и вторым входом блока хранения, третий вход ко35 торого соединен с выходом третьего сумматора, выход блока хранения соединен с первыми входами ключей, вторые входы которых соединены с выходами четвертого и пятого элементов совпадения, выходы ключей соединены через первый и второй сумматоры с электроприводами, другие выходы которых соединены с входами элемента 4И-НЕ.
40
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| СИСТЕМА КОНТРОЛЯ РАЗМЕРА И СКОРОСТИ КАПЕЛЬ ДОЖДЯ | 2006 |
|
RU2330263C2 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1986 |
|
SU1388205A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| СПОСОБ ГЕНЕРАЦИИ И ПРИЕМА СООБЩЕНИЙ О НЕСАНКЦИОНИРОВАННОМ ДОСТУПЕ К СОДЕРЖИМОМУ КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2344484C2 |
| Устройство для управления поперечной резкой ленты стекла | 1985 |
|
SU1296522A1 |
| Устройство для счета штучных предметов,перемещаемых конвейером | 1984 |
|
SU1161974A1 |
Изобретение относится к пром. автоматике и предназначено для ориентации изделий (И) на конвейерах при создании гибких автоматизированных производств. Цель - расширение функциональных возможностей за счет улучшения ориентации И. Устройство содержит источник 2 излучения, электроприводы (ЭП) 3 и 4, задатчик 5 скорости ЭП, сумматоры 6 и 7, ленты 8 и 9 с механизмами натяжения 10 и перемещения 11, фотодатчик (ФД) 12, линейку ФД 13, емкостные реле 14, 15 с датчиками 16 и 17, опоры 31 и 32 с датчиками 33 и схему обработки информации. Последняя содержит триггер 18, элементы 19-22, 25 совпадения, элементы И-НЕ 23 и 24, одновибратор 26, сумматор 27, блок 28, хранения и ключи 29-30. При прохождении И вдоль системы ФД 12, 13 и датчиков 16, 17 определяется положение продольной координаты И относительно продольной осевой координаты конвейера. По измеренному приращению длины И по отношению к длине И в ориентированном положении ФД 12, 13 с источниками 2 излучения, сумматором 27 и блоком 28 хранения определяется угол смещения продольной координаты И, что и определяет приращение скорости одного из ЭП. Направление разворота И и выбор ЭП, которому необходимо приращение скорости, определяется с помощью реле 14, 15 и датчиков 16, 17 установкой триггера 18. При нахождении И в ориентируюпхем устройстве срабатывают датчики 33, нулевой потенциал элемента И-НЕ 23 сбрасывает блок 28 хранения в нулевое состояние и с задержкой, равной времени выхода И из ориентирующего устройства, выключает ЭП 3, 4. 3 ил. - Л- : J о J гул -L о 4 ОС с: ее ю 
| Машина для внесения органических удобрений | 1983 |
|
SU1113015A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
