СО
О
4
4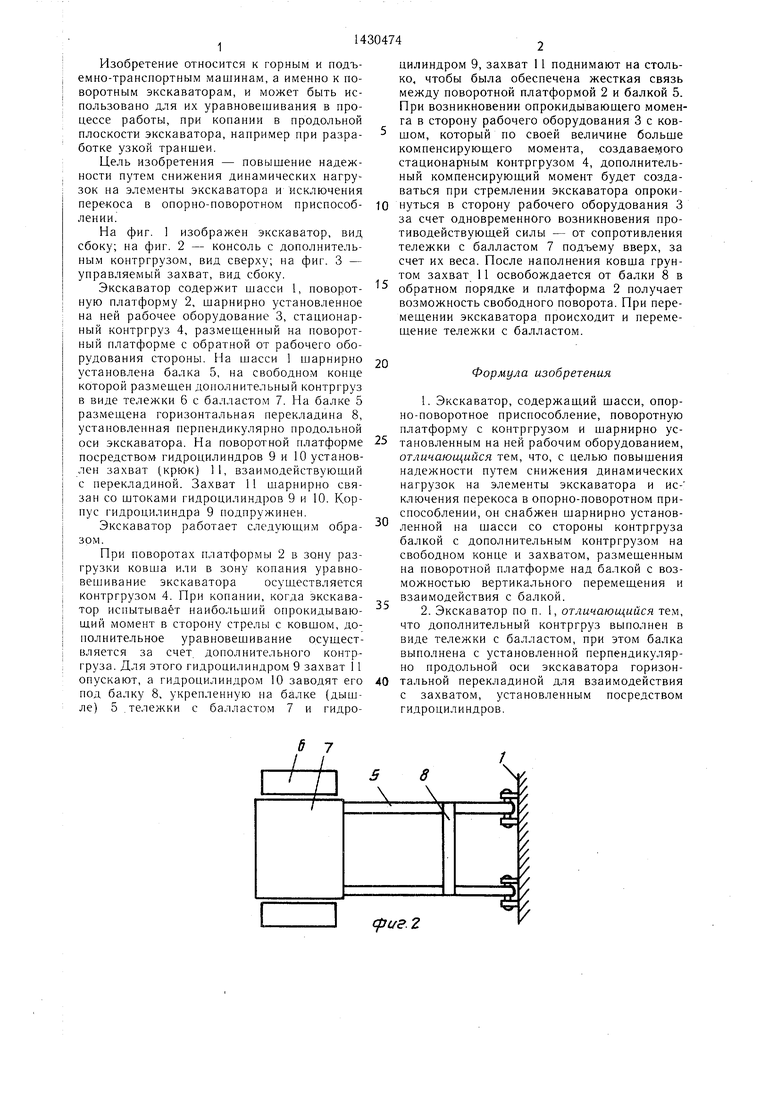
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1991 |
|
RU2018585C1 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2009 |
|
RU2390611C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| Экскаватор | 1986 |
|
SU1411398A1 |
| Рабочее оборудование экскаватора-драглайна | 1988 |
|
SU1666649A1 |
| Землеройная машина | 1983 |
|
SU1138462A1 |

Изобретение относится к горным и подъемно-транспортным машинам. Цель - повышение надежности путем снижения динамических нагрузок на элементы экскаватора и исключения перекоса в опорно-поворотном нриснособленип. Экскаватор включает шасси , поворотную платформу (ПП) 2 и шарнирно установленное на ней рабочее оборудование 3. На ПП 2 установлен стационарно контргруз (КГ) 4. На шасси I шарнирно установлена балка (Б) 5. На свободном конце последней размещен дополнительный КГ в виде тележки 6 с балластом 7. На Б 5 размешена Б 8, с которой взаимодействует захват I I. При копании дополнительное уравновешивание осуществляется за счет дополнительного КГ. Для того захват I) опускают посредством гидроцилиндра (ГЦ) 9, а гидроцилиндром Ю заводят под Б 8. Захват I I поднимают так, чтобы была обеспечена жесткая связь между ПП 2 и Б 5. После наполнения ковша грунтом захват 11 освобождают от Б 8 в обратном по- „ рядке и ПП 2 получает возможность свобод- Ш ного поворота, i з. п. ф-лы, 3 ил. (Л
ff 11 fO
фцг.1
Изобретение относится к горным и подъемно-транспортным машинам, а именно к поворотным экскаваторам, и может быть использовано для их уравновешивания в процессе работы, при копании в продольной плоскости экскаватора, например при разработке узкой траншеи.
Цель изобретения - повышение надежности путем снижения динамических нагру- зок на элементы экскаватора и исключения перекоса в опорно-поворотном приспособлении.
На фиг. 1 изображен экскаватор, вид сбоку; на фиг. 2 - консоль с дополнительным контргрузом, вид сверху; на фиг. 3 - управляемый захват, вид сбоку.
10
цилиндром 9, захват 11 поднимают на столько, чтобы была обеспечена жесткая связь между поворотной платформой 2 и балкой 5. При возникновении опрокидывающего момента в сторону рабочего оборудования 3 с ковшом, который по своей величине больше компенсируюш,его момента, создавае1у1ого стационарным контргрузом 4, дополнительный компенсируюш.ий момент будет создаваться при стремлении экскаватора опрокинуться в сторону рабочего оборудования 3 за счет одновременного возникновения противодействующей силы - от сопротивления тележки с балластом 7 подъему вверх, за счет их веса. После наполнения ковша грунтом захват 11 освобождается от балки 8 в
Экскаватор содержит шасси 1, поворот- обратном порядке и платформа 2 получает ную платформу 2, шарнирно установленноевозможность свободного поворота. При перена ней рабочее оборудование 3, стационарный контргруз 4, размешенный на поворотный платформе с обратной от рабочего оборудования стороны. На шасси 1 шарнирно 20 установлена балка 5, на свободном конце которой размещен дополнительный контргруз в виде тележки 6 с балластом 7. На балке 5 размещена горизонтальная перекладина 8,
мещении экскаватора происходит и перемещение тележки с балластом.
Формула изобретения
Экскаватор работает следуюшим обра- зом.
При поворотах платформы 2 в зону разгрузки ковша или в зону копания уравновешивание экскаватора осуществляется контргрузом 4. При копании, когда экскаватор испытывает наибольший опрокидывающий момент в сторону стрелы с ковшом, дополнительное уравновещивание осуществляется за счет дополнительного контргруза. Для этого гидроцилиндром 9 захват 11
35
отличающийся тем, что, с целью повышения надежности путем снижения динамических нагрузок на элементы экскаватора и ис- ключения перекоса в опорно-поворотном приспособлении, он снабжен шарнирно установленной на щасси со стороны контргруза балкой с дополнительным контргрузом на свободном конце и захватом, размещенным на поворотной платформе над балкой с возможностью вертикального перемещения и взаимодействия с балкой.
под балку 8, укрепленную на балке (дышле) 5 .тележки с балластом 7 и гидрос захватом, установленным гидроцилиндров.
посредством
0
цилиндром 9, захват 11 поднимают на столько, чтобы была обеспечена жесткая связь между поворотной платформой 2 и балкой 5. При возникновении опрокидывающего момента в сторону рабочего оборудования 3 с ковшом, который по своей величине больше компенсируюш,его момента, создавае1у1ого стационарным контргрузом 4, дополнительный компенсируюш.ий момент будет создаваться при стремлении экскаватора опрокинуться в сторону рабочего оборудования 3 за счет одновременного возникновения противодействующей силы - от сопротивления тележки с балластом 7 подъему вверх, за счет их веса. После наполнения ковша грунтом захват 11 освобождается от балки 8 в
обратном порядке и платформа 2 получает возможность свободного поворота. При перемещении экскаватора происходит и перемещение тележки с балластом.
Формула изобретения
тановленным на ней рабочим оборудованием,
отличающийся тем, что, с целью повышения надежности путем снижения динамических нагрузок на элементы экскаватора и ис- ключения перекоса в опорно-поворотном приспособлении, он снабжен шарнирно установленной на щасси со стороны контргруза балкой с дополнительным контргрузом на свободном конце и захватом, размещенным на поворотной платформе над балкой с возможностью вертикального перемещения и взаимодействия с балкой.
с захватом, установленным гидроцилиндров.
посредством
///////// // Oj
Ю
err:
сриа-З
| Патент США № 4402413, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Устройство для уравновешиваниязЕМлЕРОйНОй МАшиНы | 1979 |
|
SU827706A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
