I Изобретение относится к машинострое- Йию и может найти применение в различных Инструкциях столов и подобного оборудо- бания.
Цель изобретения - расширение технологических возможностей механизма за счет возможности изменения расстояния между соседними выступами.
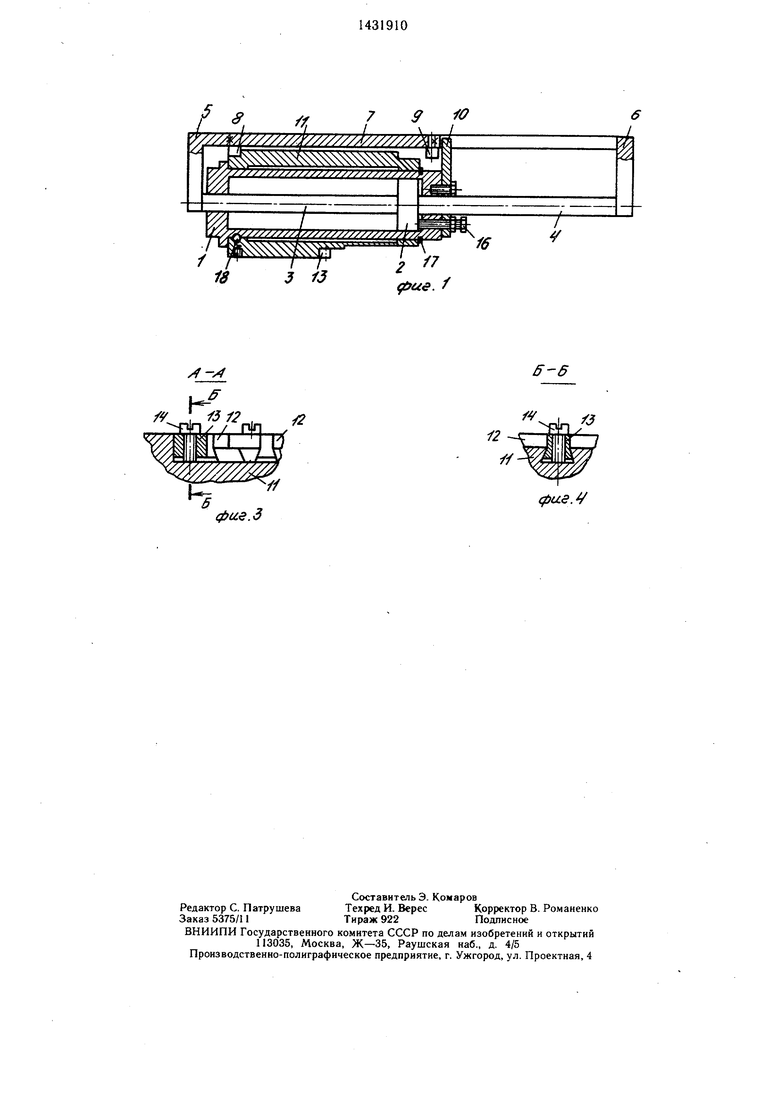
На фиг. I изображено устройство, разрез; на фиг. 2 - развертка образующей б арабана; на фиг. 3 - разрез А-А на фиг. 2; ьа фиг. 4 7- разрез Б-Б на фиг. 3.
Механизм состоит из корпуса 1 сило- Еого цилиндра, в котором перемешается горшень 2. Поршень 2 содержит два штока 3 и 4, которые посредством фланцев Е и 6 соединены с салазками 7. На салазках 7 жестко установлено два стопора 8 I 9. Для предотвращения поворота салазок 7 вокруг оси штоков 3 и 4 служит Ограничитель 10, закрепленный на корпусе 1, И своим выступом установленный в пазу (|алазок 7. На образующей цилиндричес- 11ой поверхности корпуса 1 с возможностью поворота вокруг его оси установлен барабан П. На барабане 11 по винтовой ли- Йии (угол наклона К) выполнен уступ 12. РЯДОМ с уступом ниже в осевом направ- ении выполнены пазы типа «ласточкин Хвост. В пазах устанавливаются быстро- Съемные выступы 13. Количество всех вы- Ступов соответствует максимальному числу точек позиционирования.
Быстросъемные выступы 3 могут иметь два положения: рабочее и холостое. Рабочее ({:оответствует положению, когда выступ 13 установлен рядом с уступом 12. Для вывода быступа 13 в одно из положений необходимо отвернуть слегка винт 14 и сдвинуть выступ 13 в осевом направлении в ту или другую сторону: если в рабочее положение, iro до упора в уступ 12, если в холостое, то от уступа 12 на расстояние, при котором при взаимодействии стопора 9 с уступом 12 стопор 9 .свободно проходит между уступом 12 и холостым выступом 13. Для вывода стопора 9 из взаимодействия с очередным выступом 13 служат наклонные поверхности 15, обеспечивающие поворот барабана 11, при взаимодействии с ними стопора 8. Осевую нагрузку поршня 2 с правой стороны воспринимают регулируемый упор 16. Стопорит барабан 11 в осевом направлении кольцо 17, а в радиальном - фиксатор 18 предельного момента.
Механизм работает следующим образом. Вначале его настраивают на требуемый
шаг, сдвигая выступ 13 в нужном порядке. Затем рабочая среда подается в правую полость цилиндра 1. Салазки 7 при этом перемещаются на определенное расстояние и стопор .9 вначале взаимодействует с клиновой поверхностью 15 выступа 13, а затем после
поворота барабала 11 - с винтовой поверхностью уступа 12 до взаимодействия его боковой поверхности с боковой поверхностью выступа 13. Барабан 11 при этом поворачивается и останавливается в определенном положении. Затем рабрчая среда подается в левую полость цилиндра 1 и стопор 8, взаимодействуя с клиновой поверхностью зубца, поворачивает барабан 11
0
на J- оборота, т. е. угол, соответствующий Ил
тому, чтобы стопор 9 при обратном перемещении взаимодействовал с очередным выступом 13. Затем рабочая среда снова подается в правую полость цилиндра 1 и
г салазки 7 перемещаются по заданной программе, т. е. до упора стопора 9 в очередной выступ 13. И так цикл повторяется до тех пор, пока барабан 11 не. сделает полный оборот. После чего он снова повторяется по набранной из выступов 13 про0 грамме.
Формула изобретения Механизм перемещення исполнительного органа, содержащий салазки, соедн- ненные с силовым цилиндром, стопор, расположенный на салазках, и барабан с двумя
5 рядами выступов, расположенных на его образующих, один из которых размещен по винтовой линии с возможностью взаимодействия с упомянутым стопором, отличающийся тем, что, с целью расширения технологических возможностей, механизм снаб0 жен дополнительный стопором, а барабан установлен соосно с силовым цилиндром, при этом на поверхности барабана по винтовой линии выполнен уступ, вдоль которого размещены с возможностью перемещения
г выступы, взаимодействующие с основным стопором, а основной и дополнительный стопоры установлены с возможностью взаимодействия соответственно, с поверхностью уступа и вторым рядом выступов.
J /J
gCfue. /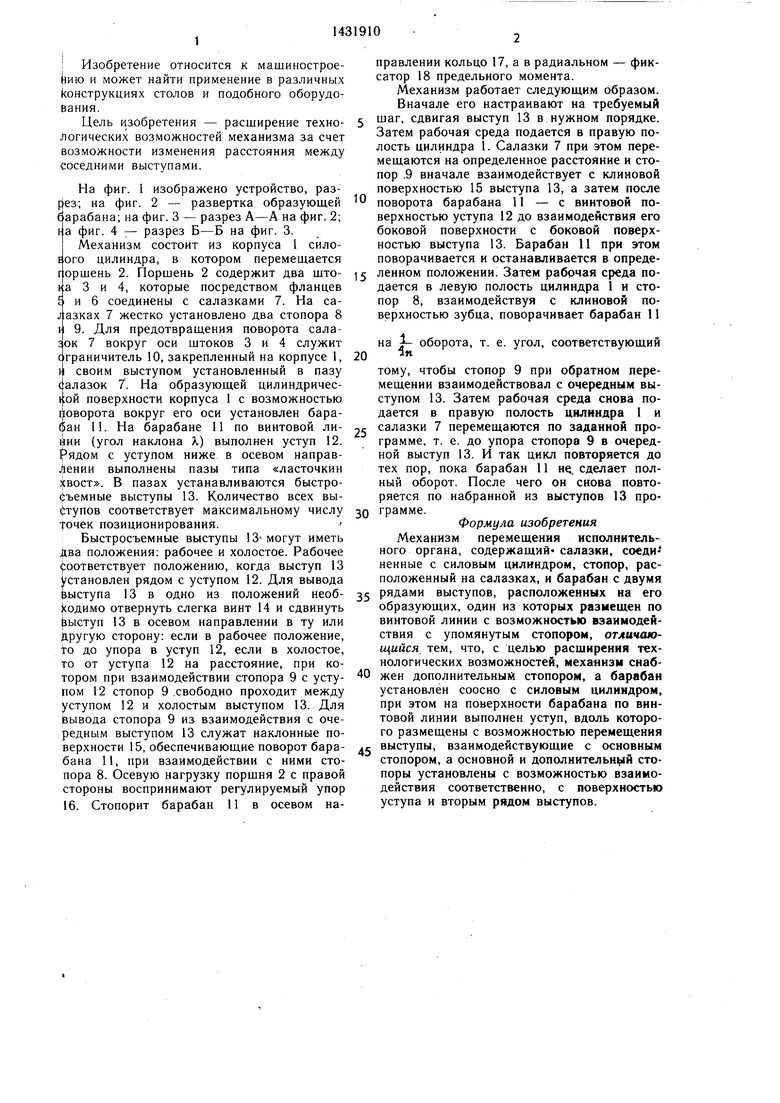
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения стола | 1986 |
|
SU1366346A1 |
| Устройство для клеймения | 1988 |
|
SU1667982A2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЗУБЧАТЫХ КОЛЕС ПОСРЕДСТВОМ ВАЛЬЦЕВАНИЯ ГОРЯЧИХ ЗАГОТОВОК | 1946 |
|
SU69665A1 |
| Устройство для позиционирования | 1985 |
|
SU1301622A1 |
| Механизм перемещения исполнительного органа | 1985 |
|
SU1271704A1 |
| Пистолет | 1982 |
|
SU1787256A3 |
| Токарно-винторезный станок | 1981 |
|
SU1160926A3 |
| СУППОРТ ТОКАРНО-РЕВОЛЬВЕРНОГО АВТОМАТА | 1973 |
|
SU406646A1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| СУППОРТ ТОКАРНО-РЕВОЛЬВЕРНОГО АВТОМАТА | 1973 |
|
SU405646A1 |
Изобретение относится к механизмам перемещения столов и аналогичных узлов по заданной программе. Цель изобретения - расширение технологических возможностей. При перемещении салазок с закрепленными на них стопорами 8 и 9 влево клиновая поверхность стопора 9 взаимодействует с аналогичной поверхностью упора 13, скользит по ней, поворачивая барабан 11, до тех пор, пока не сойдет с упора 13, после чего стопор 9 продолжает поступательное перемещение влево до взаимодействия с уступом 12, выполненным по винтовой линии барабана 11, скользит по нему, поворачивая барабан 11 до тех пор, пока стопор 9 не упрется в боковую поверхность очередного упора 13. Салазки переместились на требуемую величину. При обратном ходе салазок стопор 9 скользит по боковой повер.х- ности упора 13/выходит из взаимодействия с ним, после чого стопор 8 взаимодействует с упорами второго ряда и поворачивает барабан 11. Расположение быстросъемных упоров 13 в требуемой последовательности позволяет достичь по ставленной цели. 4 ил. S (Л с 4 со со
/f
7
фае.З
ff 6
X
//
фае.
| Механизм перемещения исполнительного органа | 1985 |
|
SU1271704A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
