м
О9
ьо
t1432707
Изобретение относится к электротехнике и может быть использовано в ктроприводах постоянного тока.
Целью изобретения является повышение, точности позиционирования и быстродействия .
На фиг. Г приведена схема электропривода; на фиг. 2 - характеристика первого функционального преобразователя, на фиг. 3- характери:стика второго функционального преобразователя.
эле-
I
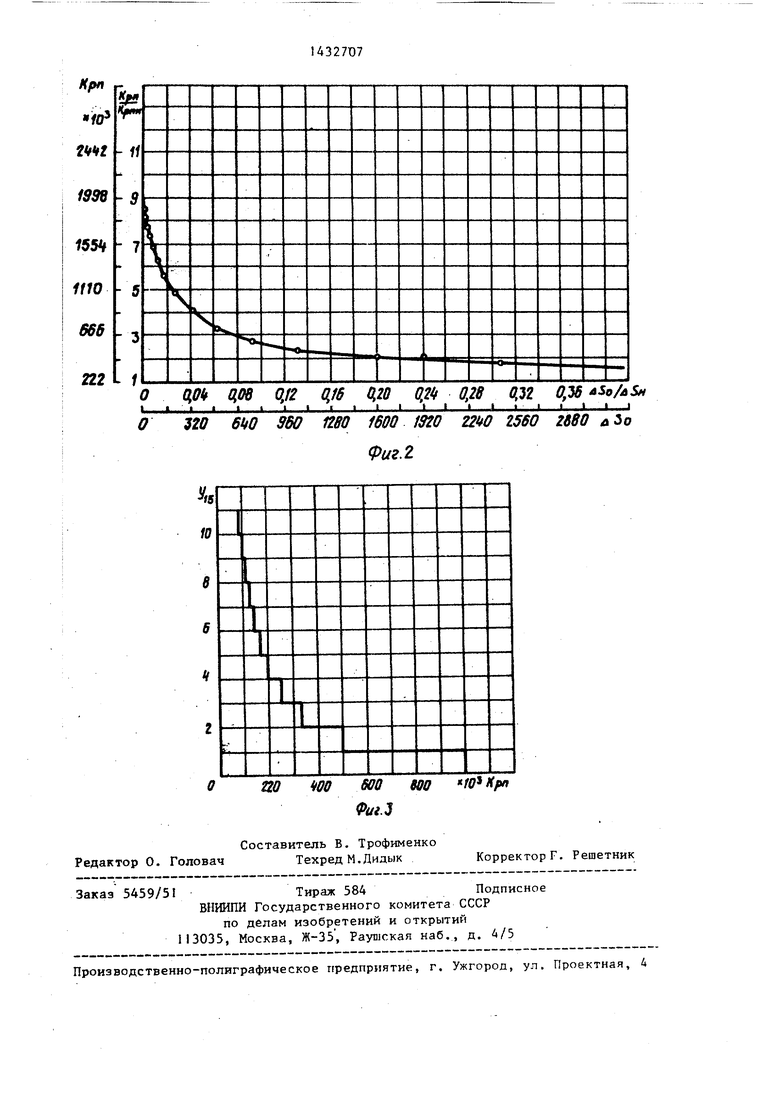
Позиционный электропривод постоянного тока содержит электродвигатель подключенный к вентильному преобразователю 2, последовательно соединенные блок 3 ввода задания, регулятор.- А положения, первый сумматор 5 и регулятор 6 частоты вращения, выход ко- 20 торого связан с входом вентильного преобразователя 2, датчики 7 и 8 час- I тоты вращения и положения, выходы которых соединены с вторыми входами со10I,15
I.
35
ответственно первого сумматора 5 и ре-25 где Е - обозначение целой части вы- гулятора 4 положения, включакяцего последовательно соединённые блок 9 памяти и первый функциональный преобразователь 10, причем управляющий вход блока 9 памяти подк.пючен к пер- 30
; вому выходу блока 3 задания. Электропривод также содержит последователь; но соединенные комбинационный сум1 матор 1I, блок 12 умножения-деления
и биполярный цифроаналоговый преоб; разОБатель 13, выход которого явля ется выходом регулятора положения, второй функциональный преобразова; тель 14, вход которого соединен с выходом первого функционального пре- 40 образователя 10 и вторым входом блока 12 умножения-деления, первый, второй и третий входы к омбинационного сумматора 11 соединены соответственно с выходом второго функционального преобразователя 14, с вторым .выходом блока 3 ввода задания и выходом датчика 8 положения, информационный выход комбинационного сумматора 11 подключен к информационному входу блока 9 памяти, а знаковый выход соединен со знаковым входом биполярного цифроаналогового преобразователя 13. Между выходом регулятора 6 частотывра- щения и входом вентильного преобразо- « вателя 2 включены последовательно соединенные сумматор 15 и регулятор 16 тока, к входу сумматора 15 подключен выход датчика 17 тока.
45
50
ражения.
Одновременно с вводом уставки задания на управляющий вход блока 9 памяти от блока 3 ввода задания пере мещения поступает управляющий сигнал, по которому блок 9 памяти осуществляет запоминание информации, по ступающей на его второй вход, т.е. значение коДа Y,, соответствующее абсолютной величине начального рассогласования по положению (uSg), Сигнал Y(o поступает на вход первог функционального преобразователя 10, реализующего зависимость (/ДВо/) (фиг. 2), которая обеспечивает опред ление коэффициентов усиления регулятора положения для получения предель ного апериодического процесса отработки любых перемещений.
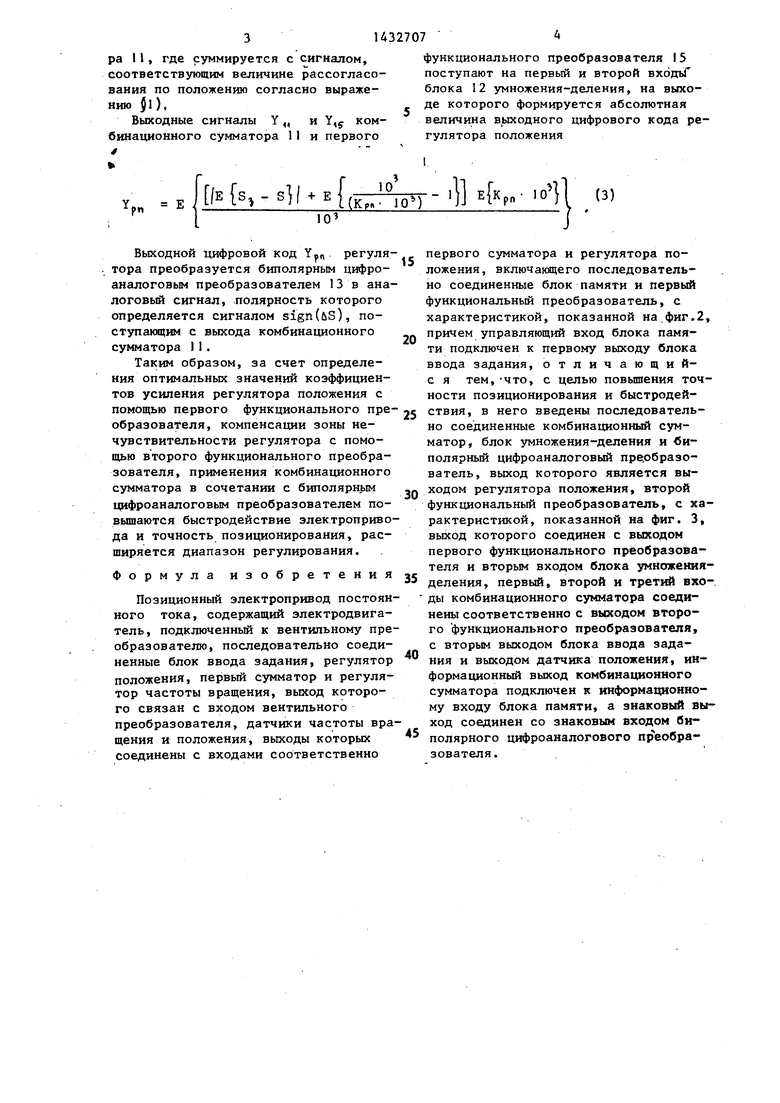
Выходной сигнал Y первого функц онального преобразователя 10, соответствующий значению К 10, где 10 - масштабирукнций множитель, пост пает на вход второго функционального преобразователя 14, реализующего зависимость уставки компенсации зоны н чувствительности от коэффициента уси ления регулятора положения (фиг. 3)
- | (2)
10
YU Е |(Кр„. 10) J .
Выходной сигнал Y(4 второго функционального преобразователя 14 посту пает на вход комбинационного суммато
Электропривод работает следующим
Уставка задания S.. вводится с помощью блока 3 задания перемещения
20 . на второй вход комбинационного сумматора I, на третий вход которого подается от датчика 8 положения цифровой сигнал, соответствующий факти- 10 ческому положению механизма S, а на первый вход - от второго функционального преобразователя 14 цифровой код уставки компенсации зоны нечувствительности Y, . Комбинацион- 15 ный сумматор I1 определяет на своих выходах 1 и 2 соответственно цифровой код, абсолютной величины рассогласования по положению Y и знак sign(uS)
Y« /EfSj - + Y,ji (1)
sign(uS)
I.
при при
где Е - обозначение
5
5 где Е - обозначение целой части вы- 0
0
5
0
ражения.
Одновременно с вводом уставки задания на управляющий вход блока 9 памяти от блока 3 ввода задания перемещения поступает управляющий сигнал, по которому блок 9 памяти осуществляет запоминание информации, поступающей на его второй вход, т.е. значение коДа Y,, соответствующее абсолютной величине начального рассогласования по положению (uSg), Сигнал Y(o поступает на вход первого функционального преобразователя 10, реализующего зависимость (/ДВо/)) (фиг. 2), которая обеспечивает определение коэффициентов усиления регулятора положения для получения предельного апериодического процесса отработки любых перемещений.
Выходной сигнал Y первого функционального преобразователя 10, соответствующий значению К 10, где 10 - масштабирукнций множитель, поступает на вход второго функционального преобразователя 14, реализующего зависимость уставки компенсации зоны нечувствительности от коэффициента усиления регулятора положения (фиг. 3)
- | (2)
10
YU Е |(Кр„. 10) J .
Выходной сигнал Y(4 второго функционального преобразователя 14 поступает на вход комбинационного суммато3U32707
pa 1 1, где суммируется с сигналом, соответствующим величине рассогласования по положению согласно выражению $1),
Выходные сигналы Y,, и Y, комбинационного сумматора 11 и первого /
функционального преобразователя I5 поступают на первый и второй входъГ блока 12 умножения-деления, на выходе которого формируется абсолютная величина вьтходного цифрового кода регулятора положения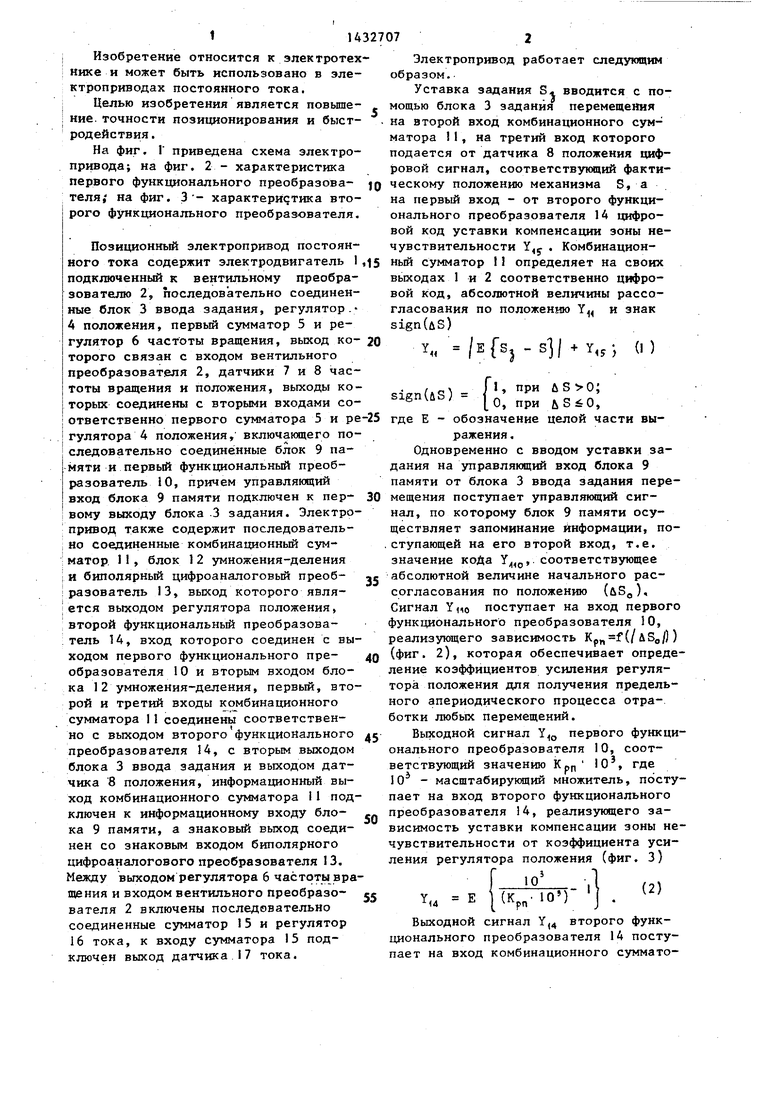
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным позиционным электроприводом постоянного тока | 1984 |
|
SU1261934A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Система управления вибростендом | 1984 |
|
SU1275396A1 |
| Устройство для регулирования частоты вращения электродвигателя | 1979 |
|
SU900390A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Устройство для отображения информации | 1980 |
|
SU1068978A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повышение точности позиционирования и быстроде1 1ствия. Регулятор 4 положения содержит блок 9 памяти, первый функциональный преобразователь 1-0, сумматор 11, блок 12 умножения-деления и биполярный цифреаналоговый пре- образователь 13, вход которого является выходом регулятора положения 4. Вход второго функционального преобразователя 14 соединен с выходом первого функционального преобразователя 10 и вторым входом блока 12 умножения- деления. В данном устройстве обеспечиваются определение оптимальных значений коэффициентов усиления и компенсации зоны нечувствительности регулято- g pa положения. 3 ил. (Л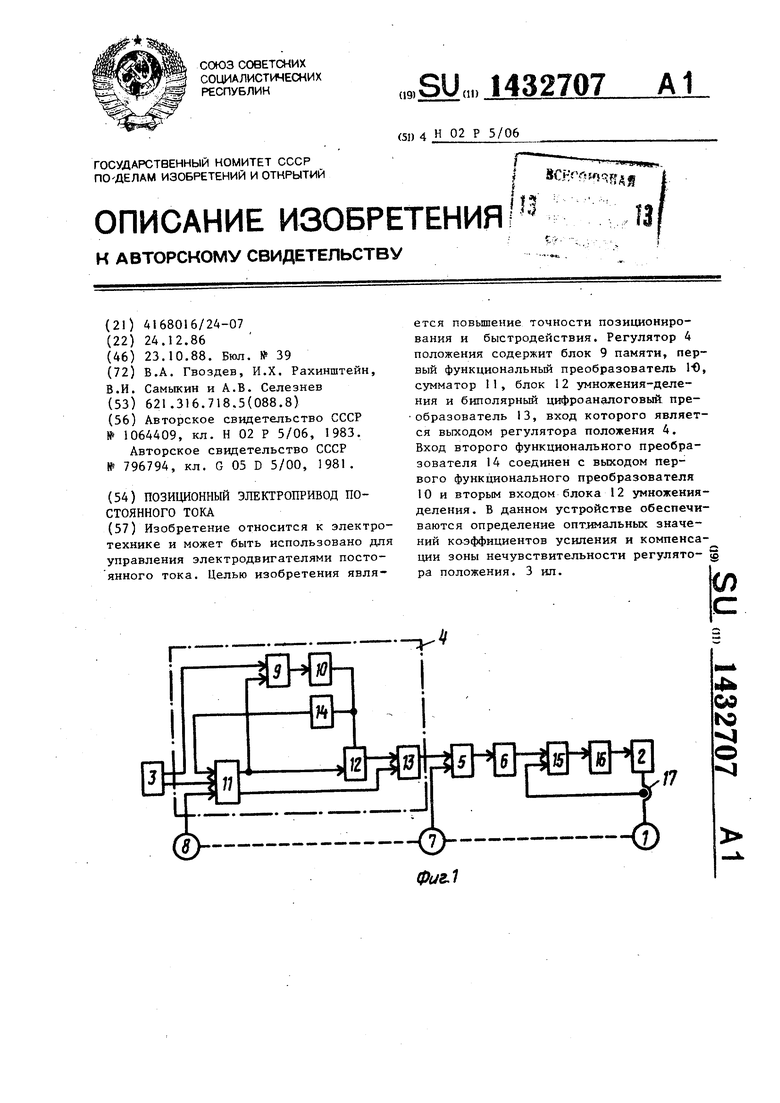
рп
Е
,.E(.-l ,„.
Выходной цифровой код Yyin . регулятора преобразуется биполярным цифро- аналоговым преобразователем 13 в аналоговый сигнал, полярность которого определяется сигналом sign(bS), по- ступакяцим с выхода комбинационного сумматора I 1 .
Таким образом, за счет определения оптимальных значений коэффициентов усиления регулятора положения с помощью первого функционального преобразователя, компенсации зоны нечувствительности регулятора с помощью второго функционального преобразователя, применения комбинационного сумматора в сочетании с биполярн.ым цифроаналоговым преобразователем повышаются быстродействие электропривода и точность позиционирования, расширяется диапазон регулирования.
Формула изобретения
Позиционный электропривод постоянного тока, содержащий электродвигатель, подключенный к вентильному преобразователю, последовательно соединенные блок ввода задания, регулятор положения, первый сумматор и регулятор частоты вращения, выход которого связан с входом вентильного преобразователя, датчики частоты вращения и положения, выходы которых соединены с входами соответственно
(3)
первого сумматора и регулятора положения, включанядего последовательно соединенные блок памяти и первый функциональный преобразователь, с характеристикой, показанной на,фиг.2, причем управляющий вход блока памяти подключен к первому выходу блока ввода задания, отличающий- с я тем, -что, с целью повьш1ения точности позиционирования и быстродействия, в него введены последовательно соединенные комбинационный сумматор, блок умножения-деления и биполярный цифроаналоговый пре образо- ватель, выход которого является выходом регулятора положения, второй функциональный преобразователь, с характеристикой, показанной на фиг. 3, выход которого соединен с выходом первого функционального преобразователя и вторым входом блока умножения- деления, первый, второй и трепй входы комбинационного сумматора соединены соответственно с вькодом второго функционального преобразователя, с вторым выходом блока ввода задания и выходом датчика положения, ин- формационный выход комбинационного сумматора подключен к информационному входу блока памяти, а знаковый выход соединен со знаковым входом би полярного цифроаналогового преобразователя.
Нрп 10
flfft
- ff
666
т
0 Ц08 OJ2 0,16 Q.2Q 0.2 0.28 О.П 0, лЗо/лЗн
20 6ltO 360 12ffO 160Q mo 22 tO 1560 Z6BO л До
Фиг.2
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления приводом | 1978 |
|
SU796794A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
