Изобретение относится к управлени позиционным электроприводом, осущест вляемому с помощью замкнутой системы подчиненного регулирования, и может быть использовано для приводов, выполняющих перемещение рабочих органов механизмов на заданную величину, как, например, приводы нажимньах винтов, линеек, подъемных столов и других подобных механизмов прокатных станов. Известна система, осуществляющая способ управления позиционным электроприводом, которая содержит каскадно включенные регуляторы токд, скорюсти вращения и положения и блок за дания перемещения, причем на входе регулятора положения сравниваются сигналы заданного и действительного значения позиции, а вьгходной сигнал этого регулятора, являясь заданием скорости вращения электропривода, сравнивается на входе регулятора ско рости с сигналом действительной скорости вращения. Регулятор скорости помимо регулирования этого параметра осуществляет также ограничение ускорения двигателя на заданном уровне за счет избыточного сигнала задания скорости, и, таким образом, регулиро вание перемещения рабочего органа производится при равноускоренном движении электропривода на участках разгона и торможения. При этом основная функция регулятора полож-ения состоит в определении момента начала торможения из условия наиболее быстрой отработки заданного перемещения при заданном ускорении, без перерегулирования ClJ Недостатком этой системы с линейным регулятором положения является относительное увеличение времени отработки перемещений рабочего органа, меньших настроечного, обусловленное тем, что в этом случае коэффициент усиления регулятора оказывается ниже того, который требуется для осуществления данного перемещения за минимальное время. В результате этого торможение,начинаясь преждевременно при относительно меньшей скорости, заканчивается экспоненциальным участком (так называемым дотягиванием). При этом относительное увеличение времени отработки перемещения получается тем большим, чем меньше это перемещение. Наиболее близким к изобретению по .техническому решению является уртройство, содержащее каскадно включенные регулятор скорости, параболический регулятор положения и блок ввода задания перемещения f2}. . Благодаря параболической характеристике регулятора положения момент начала торможения, определяемый равенством выходного сигнала регулятора положения, пропорционального квадратному корню из остатка пути, действительной скорости вращения на входе регулятора скорости, соответствует заданному перемещению, чем обеспечивается наименьшее при заданном ускорении время отработки этого перемещения.
Однако поскольку на практике параболичеркая характеристика реализуется путем аппроксимации параболы линейными участками, припасовываемыми друг к другу и при этом влияющими один на другой, параболический регулятор положэния весьма сложен по устройству и трудоемок в настройке. Это усугубляется необходимостью уменьшения наклона начального участка параболической характеристики для обеспечения монотонности процесса окончания регулирования перемещения .в линейной зоне работы системы, когда не ограничен н( один из параметров элекропривода.
Главный же недостаток параболического регулятора состоит в том, что регулирование перемещения на участке торможения происходит в этом случае практически при отсутствии избыточного сигнала задания скорости, из-за чего точность поддержания заданного значения ускорения при торможении и связанная с этим величина времени отработки перемещения становятся в сильной степени зависимыми от стабильности ряда параметров электропривода, таких, например, как напряжение питания, момент сопротивления и др. Этот недостаток усугубляется в случае перехода к цифровым (дискретным) позиционным системам, поскольку здесь начинает сказываться , и период квантования сигналов.
Таким образом, известное техническое решение не обеспечивает стабильность процесса управления, что ухудшает качество регулирования перемещений и снижает производительность механизма.
Цель изобретения - повышение точности и быстродействия устройства за счет обеспечения стабильности процесса управления при одновременном минимуме времени отработки произвольного перемещения для увеличения производительности механизма.
Поставленная цель достигается тем что в устройство для управления приводом, содержащее последовательно соединенные блок задания перемещения, первый сумматор и регулятор положения и последовательно соединенны зторой сумматор, регулятор скорости, исполнительный элемент и двигатель, выход которого связан с датчиком положения и датчиком скорости, выходы которых подключены соответственно ко второму входу первого сумматора и певому входу второго сумматора, введены после-цс зательно соединенные блок памяти, функциональный преобразователь, первый селектор и делитель и последовательно соединенные источник постоянного напряжения и второй селектор, .выход которого подключен ко входу делителя, первый вход блока памяти соединен со вторым выходом первого сумматора, а второй вход - с вторым выходом блока згщания перемещения, второй вход делителя соединен с выходом регулятора положения, а гдзыход - со вторым входом второго сумматора.
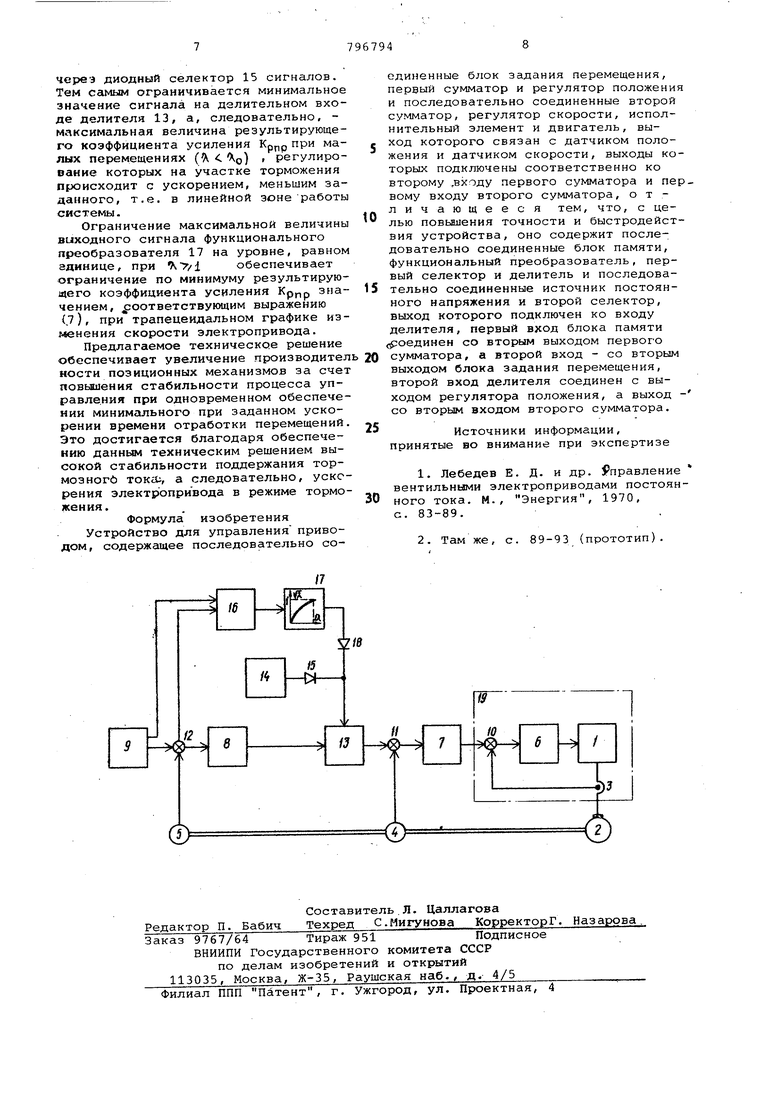
На чертеже представлена функциональная схема устройства.
Устройство содержит тиристорный преобразователь 1, питающий якорь двигателя 2, в цепи которого установлен датчик 3 тока, а с валом механически связаны датчик 4 скорости и датчик 5 положения. Преобразователь управляется трехконтурной системой подчиненного регулирования, состояще из каскадно включенных регулятора 6 тока, регулятора 7 скорости, регулятра 8 положения и блока 9 задания пермещения, при этом выходы датчика 3 тока, датчика 4 скорости и датчика 5 положения подключены соответственно к входам регулятора 6 тока, регулятора 7 скорости и регулятора 8 положения через третий 10, второй 11 и первый 12 сумматоры соответственно. Между сумматором 11 и выходом регулятора 8 положения включен делитель 13.,
Источник 14 постоянного напряжения подключен к второму селектору 15 блок 16 памяти соединен с функциональньли преобразователем 17, выход которого подключен к первому селектору 18. Сумматор 10, регулятор 6 тока, тиристорный преобразователь 1 и датчик 3 тока, образуют исполнительный элемент 19.
CynjHOcTb управления позиционным электро.приводом состоит в том, что выходной сигнал регулятора 8 положения, имеющего коэффициент усиления, пропорциональный- отношению заданного значения ускорения к максимальной скорости вращения
а&
C/f)
1
u,
max
с помощью делителя 13 увеличивают в 1/ раз, где
- относительное значение на-
-птах
чаль1Гб1Ь рассогласования по положению; 6j - ЕО начальное рассогласование по положению; ЕЗ заданное перемещение; ЕО действительное положение механизма в начальный момент регулирования переме-
Ь1ения; g максимальный путь) разгона и торможения привода.
Этот сигнал, .представляющий собой заданное значение скорости вращения OJj, сравнивают на входе регулятора 7 .скорости с сигналом действительной скорости вращения сО . В этом случае результирующий коэффициент усиления контура регулиро вания положения, связывающий сигнал с рассогласованием по положению д, оказывается пропорциональным: , U)3. ЛЬ рпр-де ,. Момент начала торможения в данной системе определяется равенством нулю результирующего сигнала на входе регулятора 7 скорости, т.е. равенством задающего сигнала Ыэ, сигналу действи ,тельной скорости вращения о) , соответствующей моменту начала торможения: г ЧтВеличина рассогласования по положению в момент начала торможения Д с учетом выражений (1), (2) и (3) получается равной ШЕ. , V 2 Поскольку при равноускоренном дв Т(ении электропривода регулирование перемещений, меньших настроечного, осуществляется при треугольном графике изменения скорости связь между .полным перемещением, численно равньм начальному рассогласованию дЕо с ростью вращения 00 выражается зависимостьюе, (5) Совместное решение С5) и (.4) приводит к соотношению представляющему собой условие минимальности времени отработки перемеще ния при равноускоренном движении электропривода. Для перемещений,больших настроечного, . таких, у которых 5s 1, значение сигнала на входе делителя
13 становится равным единице, т.е. в этом диапазоне перемещения
К -v
(О
pnpVuJ
Поскольку такие перемещения реализуются при трапецеидальном графике изменения скорости, то в этом случае
О)
9)
гг.
РП Последнее выражение, так же-как и выражение (б), является условием минимума времени отработки перемещения, производимого с максимальной скоростью Wfnax поскольку правая часть выражения (.9) как раз представляет собой величину тормозного пути для этого случая. Устройство работает следующим образом.. При вводе блоком 9 по команде пуск очередной уставки заданного перемещения E-j на .задающий вход регулятора 8 положения этой же командой , поступающей на стробирующий вход блока 16 памяти, производится запись в него информации о начальной величине рассогласования ДЕ, представляющей собой разность между сигналом заданного значения Б-), и сигналом действительного положения механизма to в момент образования команды пуск, поступающим на вход обратной связи регулятора 8 положения от датчика 5 положения. Сигнал Atg запоминается блоком 16 памяти на весь период отработки заданного перемещения t-j- Выходной сигнал блока 16 памяти, пропорциональный относительному значению начального рассогласования , поступает на вх-од функционального преобразователя 17, осуществляющего операцию извлечения квадратного корня из 9 . Выходной сигнал этого преобразователя, пропорциональный, при поступает через диодный селектор сигналов 18 в качестве делителя на вход делителя 13, на второй вход которого в качестве делимого подан выходной сигнал регулятора 8 положения, имеющего указанный выше неизменный коэффициент усиления ;)рр. Выходный сигнал делителя 13 поступает в качестве сигнала задания скорости на задающий вход регулятора 7 скорости, где сравнивается с сигналом действительной скорости вращения, поступающим с-датчика 4 скорости. При i4.o диодный селектор 18 сигналов оказывается запертым, и в каг честве делителя -на вход делителя 13 подается сигнал от. источника 14
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Устройство для управления вентильным позиционным электроприводом постоянного тока | 1984 |
|
SU1261934A1 |
| Позиционный электропривод | 1984 |
|
SU1228210A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Цифровая система синхронного управления приводами | 1974 |
|
SU543115A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Система управления электроприводом | 1981 |
|
SU995064A2 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
