сл
г ,6 8 91
/1/ /
ХШЛч
li
00 00
СП
СП
00
: Изобретение относится к обработке ме- ;таллов давлением, в частности к оснастке иля листовой штамповки, i Целью изобретения является упрощение изготовления и эксплуатации штампа.
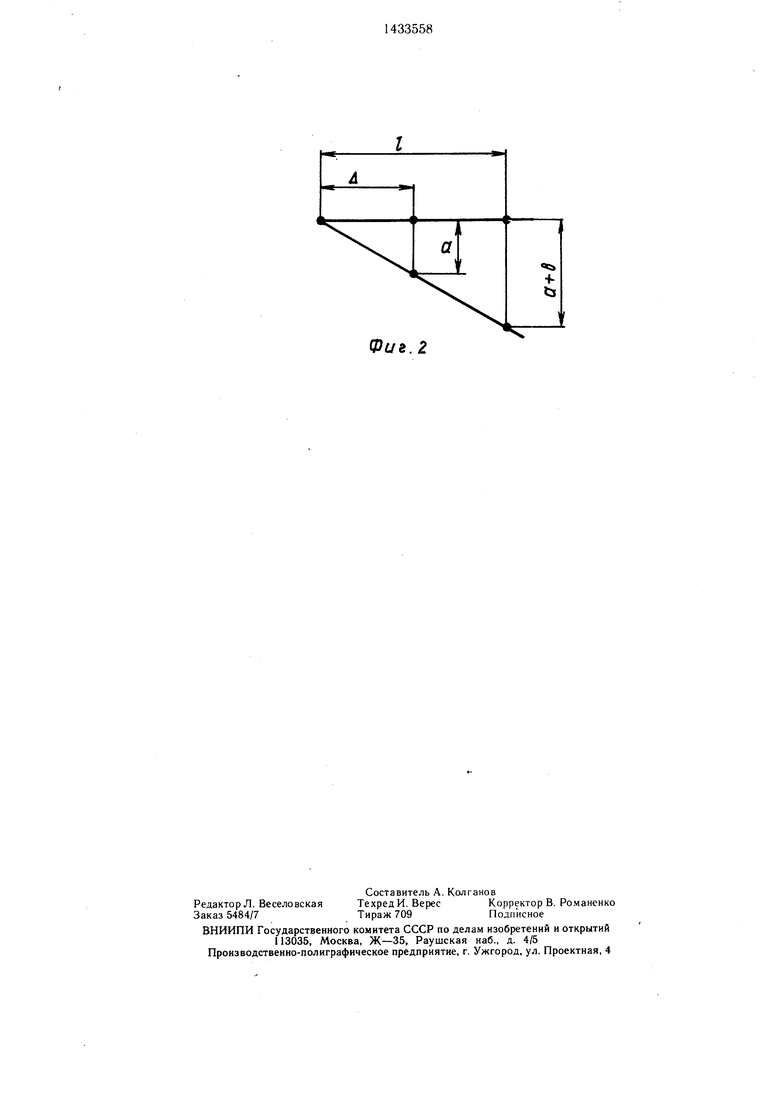
На фиг. 1 представлен штамп, общий вид (слева пуансон в верхнем положении, справа - в конечный момент гибки); на фиг. 2 - i расчетная схема рычага. ; Штамп содержит гибочный пуансон 1, I закрепленный на подвижной верхней плите I(не показана), и матрицу 2, установленную на нижней плите 3. В очке матрицы установлен выталкиватель 4, приводимый в движение буфером пресса (не показан) посредством толкателя 5. В ступенчатых отверстиях матрицы 2 подвижно установлены фиксаторы 6 с буртами, подпружиненные к ней пружинами 7 и опирающиеся на верхнюю поверхность больших плеч рычагов 8, шар- нирно связанных с плитой 3 посредством осей 9. Нижними поверхностями больших плеч рычаги 8 опираются на пальцы 10, установленные в пазах планки 11, закрепленной на выталкивателе 4. Пальцы 10 фиксируются гайками 12. На матрице 2 закреплены кронштейны 13 с установленными в их резьбовых отверстиях ограничительными винтами 14 со стопорными гайками 15.
Из фиг. 1 и 2 следует, что
- А. или Л
t
f +
где ...2 мм - высота верхней части
фиксаторов;
S - толщина обрабатываемого материала;
b - величина выхода фиксаторов и выталкивателя под зеркалом матрицы;
/ - расстояние от оси 9 до оси фиксатора 6; Д - расстояние от оси пальца 10 до
оси 9 рычага 8.
Таким образом, требуемого опережения хода фиксаторов относительно выталкивателя 4 в предлагаемом штампе можно добиться регулировкой величины Л.
Штамп работает следующим образом. Заготовка укладывается на выталкиватель 4 и на опорные поверхности фиксаторов 6. При ходе пуансона 1 вниз средняя часть заготовки прижимается к выталкивателю 4, после чего последний начинает опускаться вместе с планкой 11 и пальцами 10, освобождая рычаги 8, которые под действием фиксаторов 6, перемещаемых вниз
пружинами 7, поворачиваются на угол, регулируемый винтами 14. Поскольку пальцы 10 расположены между осями 9 рычагов 8 и осями фиксаторов 6, фиксаторы 6 опускаются быстрее выталкивателя 4 и пуансона 1 и к моменту соприкосновения заготовки с зеркалом матрицы 2 полностью выходят из отверстий заготовки, не препятствуя проведению процесса гибки. При дальнейшем ходе пуансона 1 вниз происходит процесс гибки.
0 При ходе пуансона 1 вверх выталкиватель 4 поднимает готовую деталь под зеркалом матрицы, пальцы 10 возвращают рычаги 8 в исходное положение. Готовую деталь снимают со штампа.
r Технико-экономический эффект от внедрения данного изобретения состоит в удешевлении изготовления штампа за счет упрощения его конструкции и в повышении стойкости штампа за счет ликвидации интенсивно изнашивающихся клиновых пар.
0
Формула изобретения
Штамп для гибки деталей с отверстиями на отгибаемых полках, содержащий установленный на подвижной плите пуансон и установленную на нижней плите матрицу, смонтированный в окне матрицы выталкиватель с толкателем, размещенные в периферийных отверстиях матрицы фиксаторы
Q и механизм осевого перемещения фиксаторов, при этом в нижней плите выполнен поперечный паз, отличающийся тем, что, с целью упрощения изготовления и эксплуатации штампа, отверстия в матрице для фиксаторов выполнены ступенчатыми, на нижнем
г торце фиксаторов выполнены бурты, а механизм осевого перемещения фиксаторов выполнен в виде пружин сжатия, установленных в ступенчатом отверстии и взаимодействующих с буртами фиксаторов, двух двуа«течих рычагов с неравными плечами,
0 смонтированных в пазу нижней плиты с возможностью качания во фронтальной плоскости и взаимодействия верхней поверхностью большого плеча с нижним торцом фиксатора, ограничительных винтов, уста- новленных на боковых поверхностях матрицы с возможностью взаимодействия с короткими плечами рычагов, планки с пазами на концах, установленной на нижнем торце выталкивателя, и пальцев, размещенных в пазах планки с возможностью горизонтальQ ного перемещения и периодического взаимодействия с нижними поверхностями больших плеч рычагов.
Фиг. 2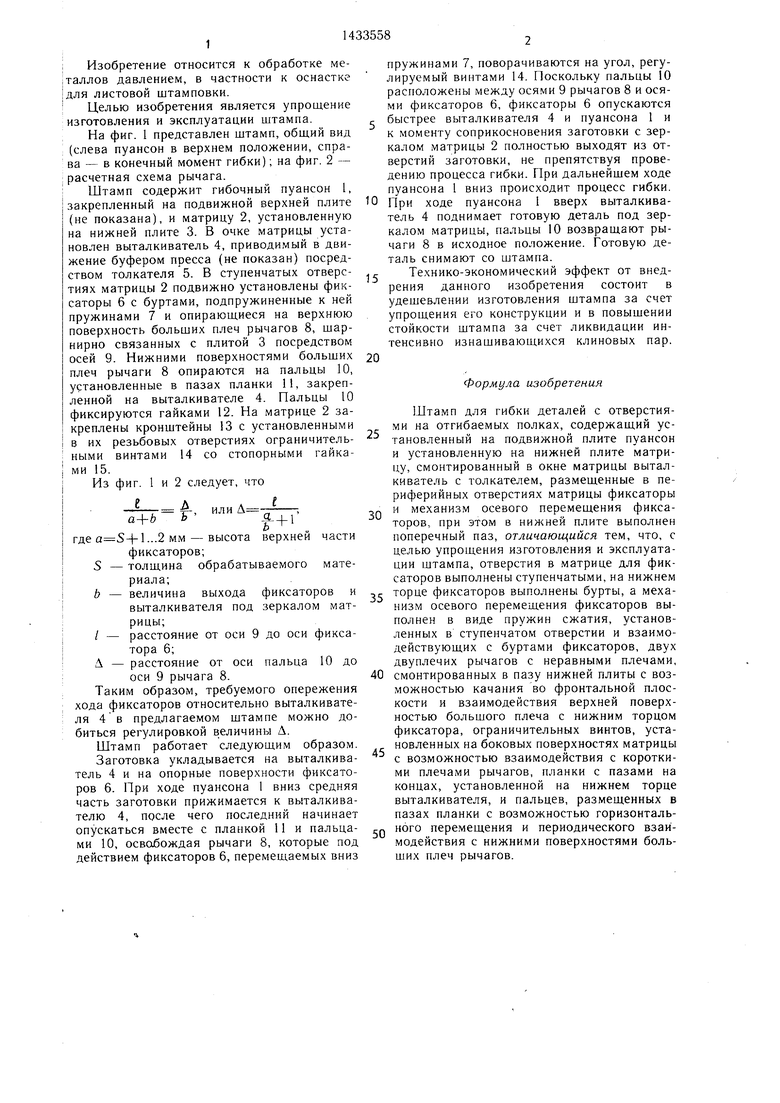
| название | год | авторы | номер документа |
|---|---|---|---|
| Штамп для гибки деталей с отверстиями на отгибаемых полках | 1983 |
|
SU1152687A1 |
| ШТАМП ДЛЯ РАЗДАЧИ ПОЛЫХ ЗАГОТОВОК | 1991 |
|
RU2083307C1 |
| Гибочный штамп для изготовления П-образных деталей с отверстиями в полках | 1980 |
|
SU1009566A1 |
| Автомат для сборки пряжек | 1981 |
|
SU986701A1 |
| ШТАМП-АВТОМАТ | 2000 |
|
RU2193941C2 |
| Штамп совмещенного действия | 1987 |
|
SU1433556A1 |
| Револьверный штамп для изготовления деталей из проволочных заготовок | 1990 |
|
SU1743667A1 |
| Штамп для многопереходной штамповки | 1987 |
|
SU1480935A1 |
| Штамп гибочный | 1980 |
|
SU871912A1 |
| Штамп для изготовления полых деталей | 1987 |
|
SU1634349A1 |
Изобретение относится к обработке металлов давлением, в частности к оснастке для листовой штамповки. Цель изобретения - упрощение изготовления и эксплуатации штампа. Штамп содержит пуансон, матрицу, подпружиненные фиксаторы (Ф) 8 в отверстиях матрицы, выталкиватель с планкой, на концах которой размещены пальцы с возможностью горизонтального перемещения и два двуплечих рычага, взаимодействующих с нижними торцами Ф и с пальцами. При ходе пуансона вниз выталкиватель с планкой опускаются, освобождая рычаги. Пальцы расположены между осью рычага и осью Ф, поэтому Ф опускаются быстрее выталкивателя и к моменту начала гибки выходят из отверстий заготовки. 2 ил.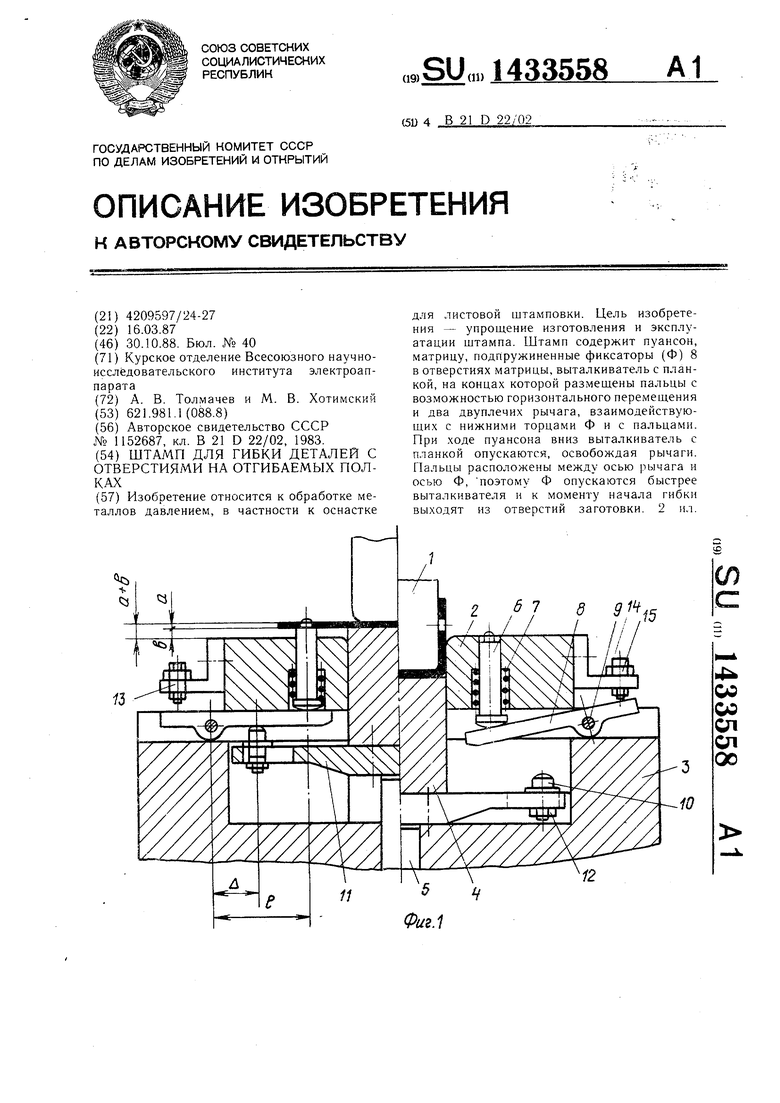
| Штамп для гибки деталей с отверстиями на отгибаемых полках | 1983 |
|
SU1152687A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
