us. 1
Изобретение относится к манипуляторам и предназначено для нреннзнонного нози- ционирования в нространстве объектов малой массы при обработке, контроле и сборке.
Целью изобретения является расширение эксплуатационных возможностей за счет перемещения предметного стола по вертикальной координате и увеличение диапазона поворота его вокруг двух .ортогональных осей горизонтальной плоскости.
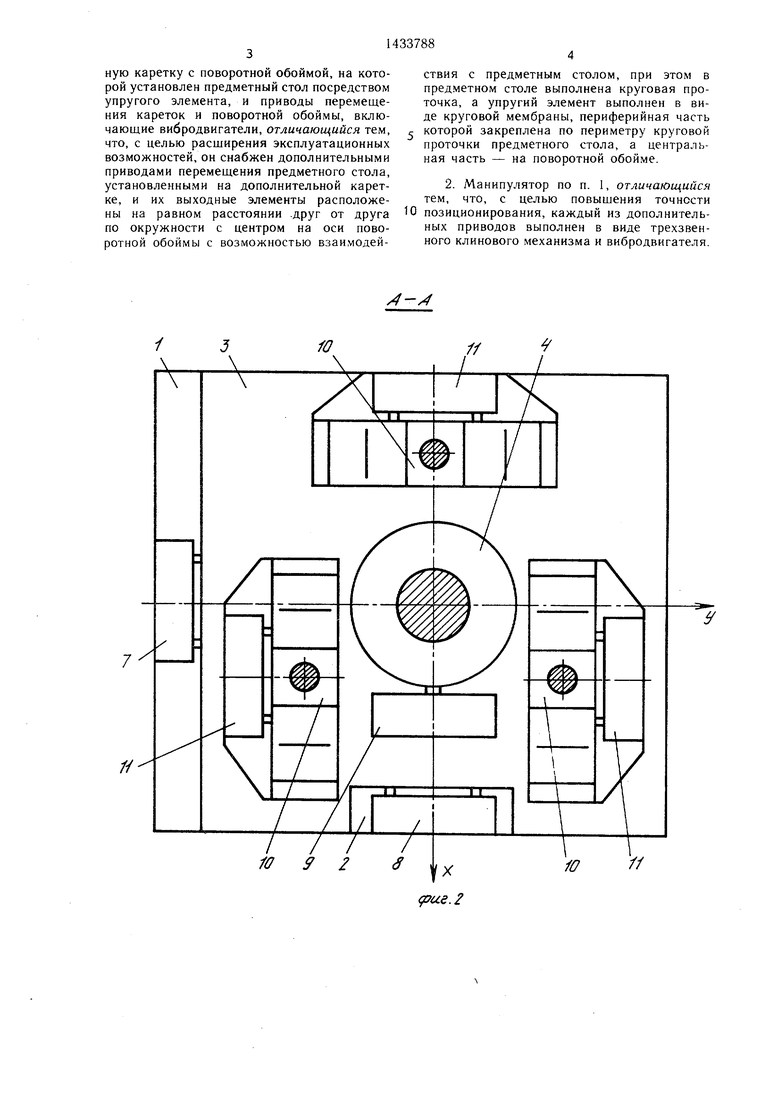
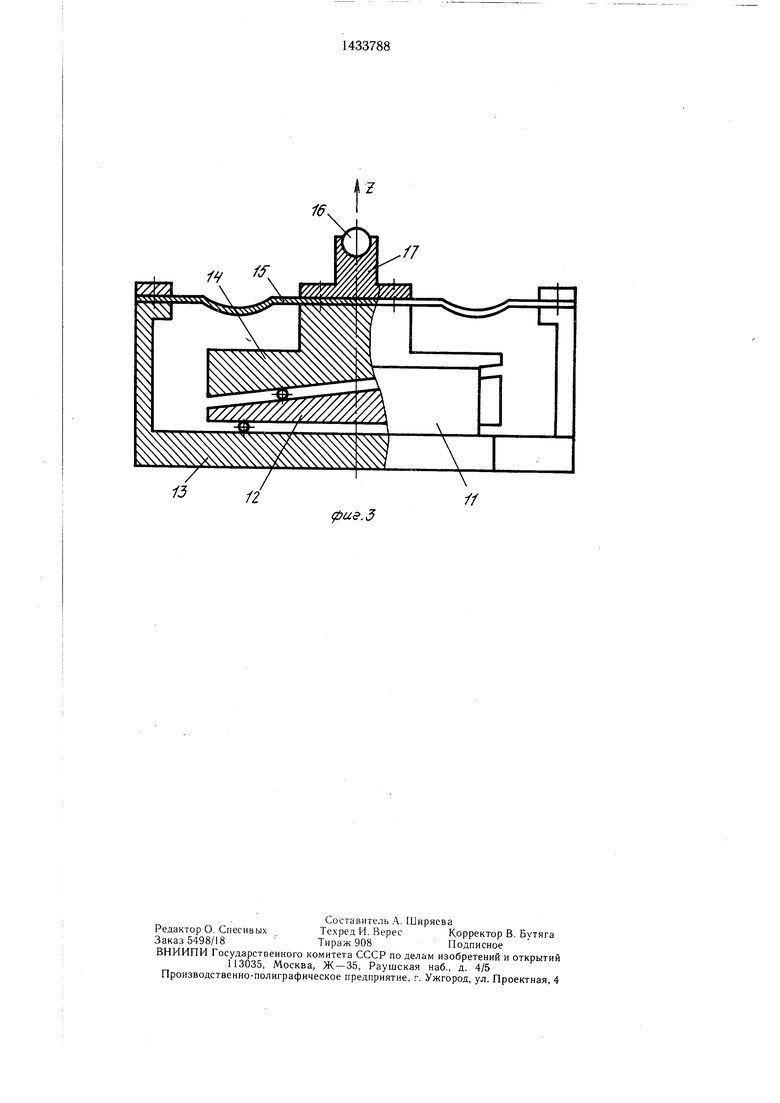
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - общий вид дополнительного привода.
Манипулятор содержит основание 1 с направляющими, на котором установлена каретка 2, несущая дополнительную каретку 3. В нодщипниках дополнительной каретки 3 установлена поворотная обойма 4, на которой посредством упругого элемента в виде круговой мембраны 5 закреплен предметный стол 6. В предметном столе 6 выполнена круговая проточка, причем периферийная часть мембраны 5 закреплена по периметру круговой проточки, а ее центральная часть жестко прикреплена к верхней торцовой части поворотной обоймы 4. Приводы перемещения каретки 2 и дополнительной каретки 3 имеют вибродвигатели 7 и 8 и предназначены для перемещения кареток по двум взаимно перпендикулярным направлениям, соответственно вдоль осей X и У. Привод поворотной обоймы включает вибродвигатель 9, фрик- ционно сопряженный с поворотной обоймой 4, и предназначен для поворота предметного стола 6 вокруг оси Z. На дополнительной каретке 3 установлены три дополнительных привода iO, каждый из которых выполнен в виде трехзвенного клинового механизма и вибродвигателя 11, фрикционно сопряженного с входным звеном 12, которое перемещается в корпусе клинового механизма 13 (фиг. 3). Постоянный кинематический контакт между выходным звеном 14 и входным звеном 12 клинового механизма обеспечивает плоская пружина 15. Шаровая опора 16, соединенная с выходным звеном 14 клинового механизма с помощью стойки 17, обеспечивает кинематическую связь с предметным столом 6, разрешающую пять степеней свободы.
Дополнительные приводы 10 установлены на дополнительной каретке 3 таким образом, что их выходные элементы 14, расположены на окружности с центром на оси поворотной обоймы 4 на равном расстоянии друг от друга.
Манипулятор работает следующим образом.
При подаче синусоидального напряжения резонансной частоты на пьезоэлектрический элемент (не показан) любого из вибродвигателей в нем возбуждаются продольные и изгибные колебания. Концы пьезоэлектрического элемента соверщают эллипсообразное движение и ввиду наличия силы сухого трения в контакте меж- ду ними и поверхностью сопряженной детали появляется движущая сила, которая и перемещает подвижную деталь. При подаче синусоидального напряжения на пьезо- элемент вибродвигателя 7 привода перемещения каретки 2 последняя перемещает0 ся по координате X. Перемещение по координате У осуществляется от вибродвигателя 8 привода перемещения дополнительной каретки 3. При синхронной работе трех вибродвигателей 11 дополнительс ных приводов входные звенья клиновых механизмов совершают перемещения в горизонтальной плоскости. Выходные звенья 14 перемещаются по координате Z вместе с шаровыми опорами 16. Ввиду кинематических связей предметного стола 6 с шаро0 выми опорами 16, разрешающих пять степеней свободы, предметный стол совершает плоскопараллельное перемещение вверх по координате Z. Упругая круговая мембрана 5 деформируется в осевом направлении. При
5 перемещении выходных звеньев 14 вниз предметный стол 6 также соверщает движение вниз ввиду действия восстанавливающей силы деформированной мембраны 5 и силы тяжести. При различных перемещениях выходных звеньев 14 дополнительных
Q приводов 10, что достигается изменением управляющих параметров (частота, а.мпли- туда, фаза, нормальное усилие сопряжения) вибродвигателей 11, обеспечивается сложное движение предметного стола 6, т. е. иово)от его вокруг любой оси, на5 ходящейся в горизонтальной плоскости, с одновременным перемещением по координате Z или только поворот. Упругая круговая мембрана 5 деформируется в осевом направлении и исключает смещение предметного стола 6 в радиальном направле НИИ. Отсутствие упругой деформации мембраны 5 в радиальном и тангенциальном направлениях позволяет при работе вибродвигателя 10 привода поворота пред.мет- ного стола 6 осуществлять поворот обой5 мы 4 вместе с предметным столом 6 вокруг оси Z.
Манипулятор обеспечивает предметному столу шесть степеней свободы, диапазон линейного перемещения по вертикальной координате 5 мм, а диапазон углового
0 поворота вокруг двух ортогональных осей горизонтальной плоскости ±4°. Точность перемещения по вертикальной координате достигается ±0,02 мкм.
55
Формула изобретения
. Манипулятор, содержащий основание с направляющими, каретку, установленную на направляющих и несущую дополнительную каретку с поворотной обоймой, на которой установлен предметный стол посредством упругого элемента, и приводы перемещения кареток и поворотной обоймы, включающие вибродвигатели, отличающийся тем, что, с целью расширения эксплуатационных возможностей, он снабжен дополнительными приводами перемещения предметного стола, установленными на дополнительной каретке, и их выходные элементы расположествия с предметным столом, при этом в предметном столе выполнена круговая проточка, а упругий элемент выполнен в виде круговой мембраны, периферийная часть г которой закреплена по периметру круговой проточки предметного стола, а центральная часть - на поворотной обойме.
2. Манипулятор по п. 1, отличающийся тем, что, с целью повыщения точности
нь1 на равном расстоянии .друг от друга 10 позиционирования, каждый из дополнительно окружности с центром на оси ново-ных приводов выполнен в виде трехзвен- ротной обоймы с возможностью взаимодей-ного клинового механизма и вибродвигателя.
ствия с предметным столом, при этом в предметном столе выполнена круговая проточка, а упругий элемент выполнен в виде круговой мембраны, периферийная часть которой закреплена по периметру круговой проточки предметного стола, а центральная часть - на поворотной обойме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1641606A1 |
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| УСТРОЙСТВО ДЛЯ ПОДБОРА ОПРАВЫ И ЛИНЗ КОРРИГИРУЮЩИХ ОЧКОВ | 1998 |
|
RU2141243C1 |
| Устройство для ориентированного перемещения изделий | 1982 |
|
SU1018265A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ РАЗМЕРОВ ПАРАМЕТРОВ НАРУЖНЫХ ПОВЕРХНОСТЕЙ И РАДИУСОВ СФЕРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2159920C1 |
| Устройство для полирования оптических деталей | 1989 |
|
SU1834787A3 |
| Шарнирный механизм манипулятора | 2020 |
|
RU2756279C1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
Изобретение относится к манипуляторам и предназначено для прециаионного позиционирования в пространстве объектов малой массы при обработке, контроле и сборке. Целью изобретения является расширение эксплуатационных возможнос 7 теи за счет перемещения предметного стола по вертикальной координате и увеличение диапазона поворота его вокруг двух ортогональных осей горизонтальной плоскости. Три дополнительных привода установлены на дополнительной каретке 3 таким образом, что их выходные элементы расположены на равном расстоянии друг от друга по окружности с центром на оси поворота обоймы 4. Эти приводы 10 обеспечивают вертикальное перемещение предметного столика 6 при синхронной работе всех трех дополнительных приводов 10, а также осуществляют поворот предметного стола 6 вокруг двух ортогональных осей в горизонтальной плоскости при различных комбинациях их работы. 1 з.п. ф-лы, 3 ил. с (Л со со 00 00
I / /
W 9 2
Ю
//
(.2
US.3
| Устройство для ориентированного перемещения изделий | 1982 |
|
SU1018265A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
