Изобретение относится к области навигационного приборостроения, а . , тбчйеге к методам девиационных работ
с арйацйёнЯЙМй дйЬта йцШнны м магнитными компасами (ДИК), предназначенным для аэимуфаяьной коррекции кур- 5 еаавых гйроскопс :й по магнитному курсу и мож1ет выть ийпб азовайо при ДёвйацийнйШ 1 авотаХ с морскими ДГ4К.
Hfeeeeteil/iciimcpe о аций суййОст i oTopbro заключается 10
$ fbMf VTO объ&кУ устанавгайзвай на 8 румбов через 45,Ьйрейёйяк) ни
У1кх румбаз г с no ipaifcfe/STajKSMSbix;- средств.. ;дё0с ВйТеА&;нре уёйёШййб , едгйй й(5го iieiiiBleiaV s одЦоврёМёийо С ЭТИМ значеййя jcoNsnacн ; гЬ Курсга ДИК вычисляют noirpeie- : нсхзтьйМК йа Курсах черва 45°Kaic разность между компасным курссял и действи1 ел тш значением магнитного ;... курса; объекта, нспольэуя приближённое роставление ;пдг1иацйя в виде пя1ги Первых КОЭФФИЦИЕНТОВ ряда , KOTopi e затем йспольэуют для ксжпенсации Г12. - с Н остатком способа йвляются брльйая трудоемкость авйиа циснных работ, при которых нёобхояшто спользовать буксировочные средства, создаюбше магнитные помехи, нео€ходимость строительства специальншс до- -.30 рогостоящих HeMarHKTtttiix пжяцадок или поворотных кругов.
Наиболее близкш к иэобретению техническим решением является способ определения полукруговой девиации 35 датчика магнитного курса летательноо аппарата, исключанадий необходимость поворота последнего.
Сущность способа эактвочается в магнитных измерениях и последующей 0 математической обработке результатов измерений, в процессе которых измеряют величины магнитных полей, дейст вуняцих в объеме чувствительных элементов датчика магнитного курса, . в горизонтальной плоскости по оси V и по оси f, затем, используя эталонное значение величины горизонтальной составляющей магнитного поля Земли (МПЗ) в месте выполнения дейиационных работ при угловом положе- 50
НИИ да Чгйка Относительно горизонтальной составлянзадей МПЗ, рассчитывают коэффициенты полукруговой девиации, При этом имеется в виду, что четвертная девиация, вызываемая влияни- 55 ем мягкогЪ железа, заблаговременно устранена или достаточна мала 112J. Недостатком способа является достаточно большой объем вычислительных операций и необходимость нали- 60 чия эталонного значения горизонтальной составляющей магнитного поля Землиц / . ;. . ,
целью изобретения является Опре елениё полукругойой девиаций и 5
., . -;
любом пункте, путем исключения расчета эталонного значения горизонтальной составляющей магнитного поля Эемли, , , Поставленная цЬль достигается TeMf что в способе определения полукруговой девиации, заключающемся в измерении горизонтальной составляющей магнйт ногопрля Земли налета; ёйьной д атчикОм маг нитного курса, измерении его азимута и сравнейий Сойтэвйяющей с ее эталонным значением для данного пункта, эталдйноеэйачёниё горизонтальной составляющей магну.тнОгбпбля Земли Определяют путем установки датчика магйитного курса ifia земной поверхности и ориентирования ёгО под тем же ази.мутом. ,-;-,.:.; ;;;;.,,„;- :.. ;, :
На фиг, 1 и 2 предстайдвйн вёК торные диаграмма и блок-схемы, поясняющие йущностб способа, На чё|)ежахп6ка9ада датчик 1 магнитного курса маятникового типа с двумя взадайо перпендикулярными чувсТВHTeJibHbiM t элементами, кото- , рые при устайоёке датчика йа 2 ориентйруютгся вдолЙ осей X и У объекта сбОтвёгсгвенйо, 3 -. йэмерятельно-кон енсациойный блок 3, теодолит 4, огриентир 5,. н - йектор индукции горизонтальной составляющей МПЗ; д- магнйт{шй датчика; -V Мд - магййтнОй Ki/pc объекта; JSy,H проекции Н йа чувствительные элементы датч.ика, Ь| йёйтйров4ййае вдоль осей X и Y объекта сботйетственнб, : Jy, JY окй задаваемые в оейиютку . чувствительных элементов датчики для компенсации Ну сООТветственйоУ U(, С/у- напряаёйие с сй:Нйал ьных обмоток чувствительных элё 4eйтoв датчика; В, С вёктори йвдУкции магнитного поля объекта, соответствующие одноименйнм Коэффициентом полукруговой девиации, в способе ощ едвяейие полукруговой девиации производится С учетом того, что четвертйая девиация вазываемай влиянием мягкого железа заблаговременно устранена, или достаточна мала
Способ заклк}чается s следующем.
Устанавливают датчик 1 на курс М. равный с,точностью -fS курсу объ- екта V , Визируют теодолит 4 на выбранный ориентир 5 и соединяют жестко датчик и «еодчолйт фиг, 1) Ориентация датчика -в выбранном направлении с точностью +5° Обеспечивает точйос ь измерений В и С не 0,5%, :
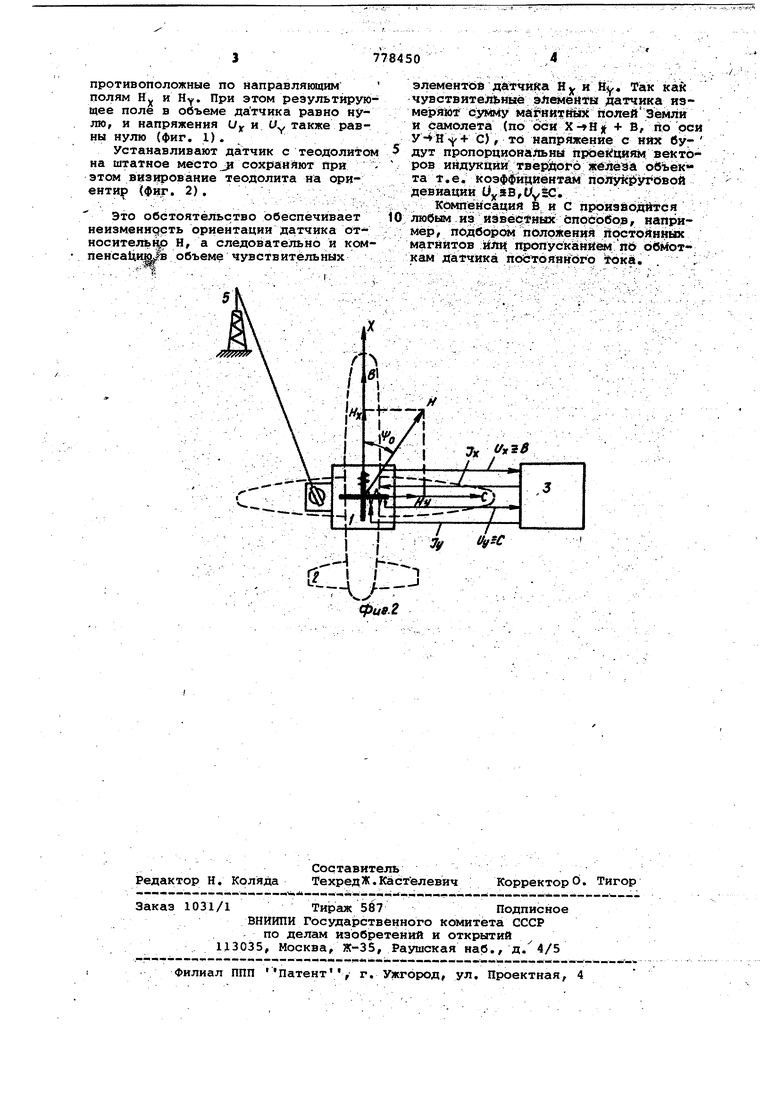
;.Й6дкЯю«сай1гдатчик l к измерительно к5 отенсацйонйоМу блоку 3, от которого в сигйальные o6M6tKH его чувстййтё й ййх элементов задают токи Vy и Чу, которчые создают магнитнйе поли, равные fto величинам и противоположные по направлякицим полям Hjj и Ну. При этом реэультирук5 вдее поле в объеме датчика равно нулю, и напряжения U и Uy равны нулю (фиг. 1). Устанавливают датчик с теодолито на штатное место и сохраняют ftp этом визирование теодолита на ориентир (Фиг. 2). Это обстоятельство обеспечивает неизменис рть ориентации датчика относитель1Ю Н, а следовательно и ком пенсаЦщд в объеме чувствительных элементЬй датгчнйа Hjf и Ну. Так кай чувствительные эЛй14 ей ы датчика измерШ магнитйых йолейЗеМли и самолета (по с)си « В, rip оси у4 С), тб напряжение с них будут пропорциональны прЬейциям вектЬ-ров индукций; TBepitotp eJTtes;a объекта t, е, коэффидйёнтам riortyiciijrrbBofll девиации ,t,lc, компенсация В и С прризйод;йтся любым из иэвёсфных: опосрбоз, например, подбором положения йостойниЫх магнитов или; пропускйййем п6 обМоткам датчика поЬтбяннгОго fbka, ;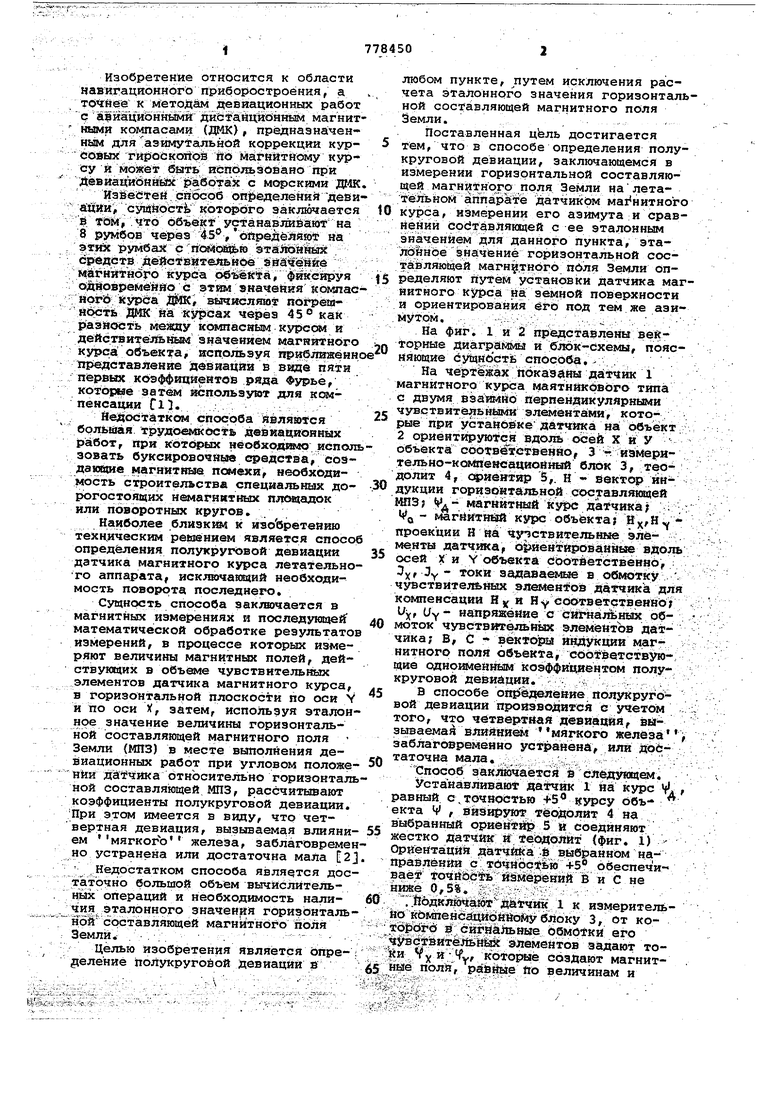
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения полукруговой девиации | 1986 |
|
SU1362931A1 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
| Способ определения полукруговой девиации | 1987 |
|
SU1434258A1 |
| Способ магнитометрической разведки | 1932 |
|
SU34086A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| СПОСОБ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА ПЕШЕХОДА | 2012 |
|
RU2503923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ, заключакяцийся в измерении горизонтальной составляквдей магнитного поля Земл.и на летательном аппарате датчиком магнитного курса, измерений его азимута и сравнении составляющей с ее эталонным значением для данного пункта, от л и ч а ю щ и И с я ем, что, с целью определения полукруговой девиации в любом пункте путем исключения расчета эталонного 311;ачения го-, ризонтальной составлякядёьй магнитного поля Земли,эталонные значения горизонтальной составляющей магнитуного поля Земли определяют путем установки датчика магнитного курса на земной поверхности и О1 йентирования его под тем же азимутом. :..:------- :-:.:- ::Ч :--v-:- V--V Х JflL ig 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| В.Г | |||
| Кожухов, Девиация Mar-i нитного компаса | |||
| М., транспорт, 1976, с | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ пуска синхронного компенсатора | 1940 |
|
SU73773A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
