|i
00
ий
N
, Изобретение относится.к вычислительной технике и может быть испольовано в специализированных и уни- 1 ерсальных ЭВМ для обработки полез- аых сигналов в измерительных и навигационных системах на фоне внешних и внутренних шумов в трактах этих сис- ;Тем.
Цель изобретения - повышение точ ности фильтрации.
I На чертеже изображена структурная г лектрическая схема регуляризованно - ро.фильтра Калмана.
I Регуляризованный фильтр Калмана содержит вычитатель 1, первый сумматор 2, первый усилитель 3, второй сумматор 4, интегратор 5, генератор стационарного случайного процесса, первый 7 и второй 8 матричные умно- 5Мтели, К блоков 9 - 9ц; возведения, Т1 квадрат, третий сумматор 10, дели- 11, второй 12 и третий 13 уси- Jп тeJiи, третий матричный умножитель |4, кo fflapaтop 15 и электронньй
16,.
I Регуляризованный фильтр Калмана работает следующим образом, I На первый вход вычитателя 1 посту пает п-мерньш сигнал, не имеющий
пума в К составляющих, а на второй 13ХОД - прогнозируемое измерение H(t) (t) от второго матричного шожителя 8. На выходе вычитателд
1 образуется невязка
(t) Z(t) - H(t)X(t),
IB которой к известных составляющих Ьодаются на вход блоков .9) - 9i; возведения в квадрат (каждая составляющая на свой- блок).
Па выходах блоков образуются величины, котор Ые складываются на третьем сумматоре 10 и делятся на величину К в делителе 11. Таким образом, на выходе делителя 11 образуется величина интенсивности стабилизирующего шума:
и ,
oi(t) 1/к 21 erct).
которая подается на генератор 6 стационарного случайного процесса в качестве управляющей величины и на уп равляющие входы первого 3 и второго 12 усилителей. С выхода генератора 6 шум ((t) поступает на второй вход
5 0 5
0
5
0
5
0
5
второго сумматора 4, на первый вход которого подаются известные (без шума) К-составляющие невязки (t) от вычислителя 1.- На выходе второго сумматора 4 образуется загаумленная невязка
g.(t) (t) + f(t).
которая подается на вход первого усилителя 3, на выходе которого осуществляется вычисление регуляризо- ванного коэффициента усиления
K(t) Vj(t)-H (t)(fJ(t) -f
+ 6i(t)ET
)
где Л(Ё) - определяется из уравнения
VA(t) F(t)V(t) + V{(t)F (t) +
XX
+ G(t) Q v(t)r/(t) - )H (t) x(/t) +6i(t)Ej.H(t)V(t)
и поправки , X(t) (t), . учитывающей поступивише измерения. На выходе второго усилителя 12 осуществляется вычисление величины А H(t)V: ) + , которая поступает на третий матричный умножитель 14, на второй вход которого поступает загаумленная невязка с выхода второго сумматора 4. На выходе третьего матричного умножителя 14 осуг5ествляется вычисле ше квадратной формы , которая подается на пер вый вход компаратора 15, на второй вход которого подается сигнал с третьего усилител я 13, равный
, где 7( одно из собственных значений матрицы AJ - один из диагональных элементов матрицы А. В случае превьпяения сигнала с третьего матричного умножителя 14 над сигналом с третьего усилителя 13, сигнал с компаратора 15 запирает электронный ключ 16, который не пропускает сигнал с выхода первого уси лителя 3. В это время оценка на выходе интегратора 5 строится только на основе предсказания в соответствии с дифференциальным уравнением:
X(t) F(t)Xt(t).
В противном случае на первом сумматоре 2 происходи.сложение предсказанной оценки-F(t)X(t) с выхода первого матричного умножителя 7 и поправки , X(t)J с выхода элект- ронного ключа 16. На выходе интегратора 5 образуется искомая оценка в соответствии с дифференциальным уравнением:
Лг -1
X(t) F(t)X(t) + ,X(t)J.
Таким образом, по сравнению с прототипом, в котором при наличии ано- tS мальных измерений, которые неизбежно присутствуют в реальных измерительных системах, в предлагаемом устрой- стве, невозможно возникновение явле-; ни расходимости фильтра и точность 20 формируемых оценок возрастает за счет .того, что аномальные измерения не участвуют в формировании оценки. Это позволяет повысить точность фильтрации на 15-17%. 25
Формула изобретения
Регуляризованный фильтр Калмана по авт. св. NJ 1166275, отличающийся тем, что, с целью повышения точности фильтрации, в него введены дополнительные второй и третий усилитель, третий матричньй умножитель, компаратор и электронный ключ, причем выход делитрля соединен через второй дополнительный усилитель с входом третьего дополнительного усилителя и первым входом третьего матричного умножителя, второй вход которого подключен к выходу второго сумматора, а выход матричного умножителя соединен с первым входом компаратора, второй вход которого соединен с выходом дополнительного третьего усилителя, причем выход усилителя подключен к первому входу первого сумматора через электронньй ключ к управляющему входу которого подключен выход компаратора.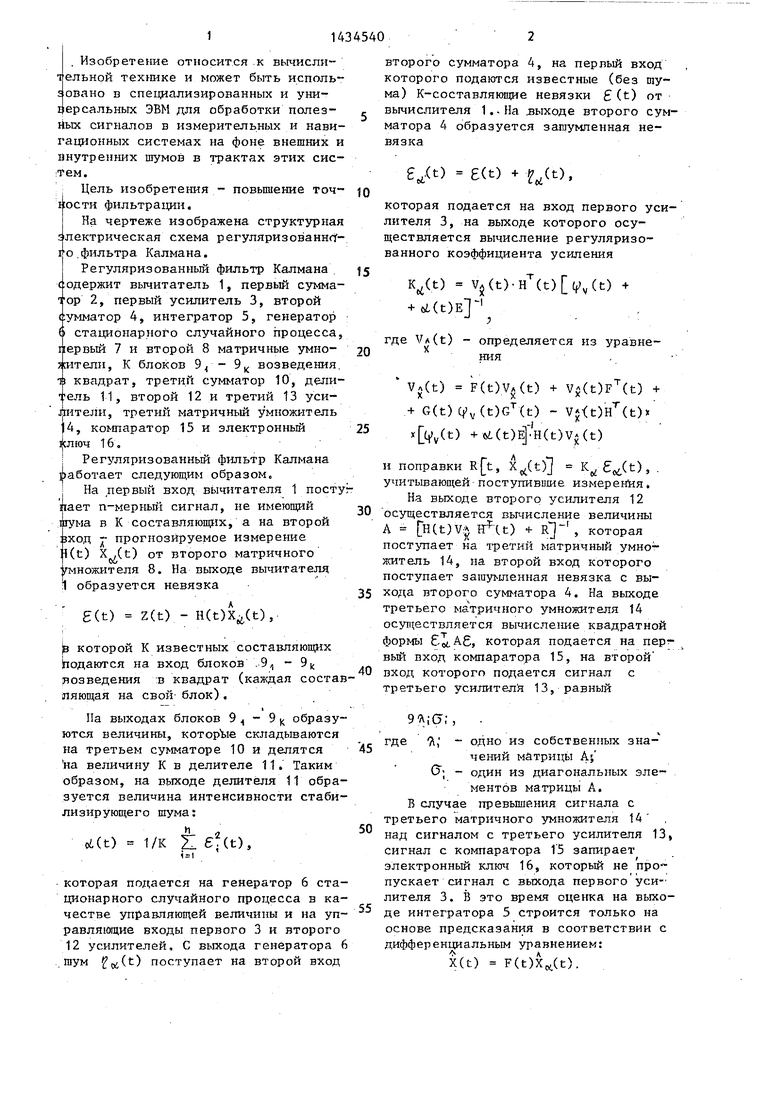
| название | год | авторы | номер документа |
|---|---|---|---|
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Регуляризованный фильтр Калмана | 1985 |
|
SU1317652A1 |
| Регуляризованный фильтр | 1990 |
|
SU1739482A1 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| Двумерный фильтр | 1988 |
|
SU1555829A1 |
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| МОДИФИЦИРОВАННЫЙ ФИЛЬТР КАЛМАНА | 1992 |
|
RU2160496C2 |
| Следящий измеритель | 1982 |
|
SU1061082A1 |