Изобретение относится к вычислительной технике и может быть использовано для получения оценок состояния сложных технических систем и решения задач навигации.
Цель изобретения - повышение точности фильтра.
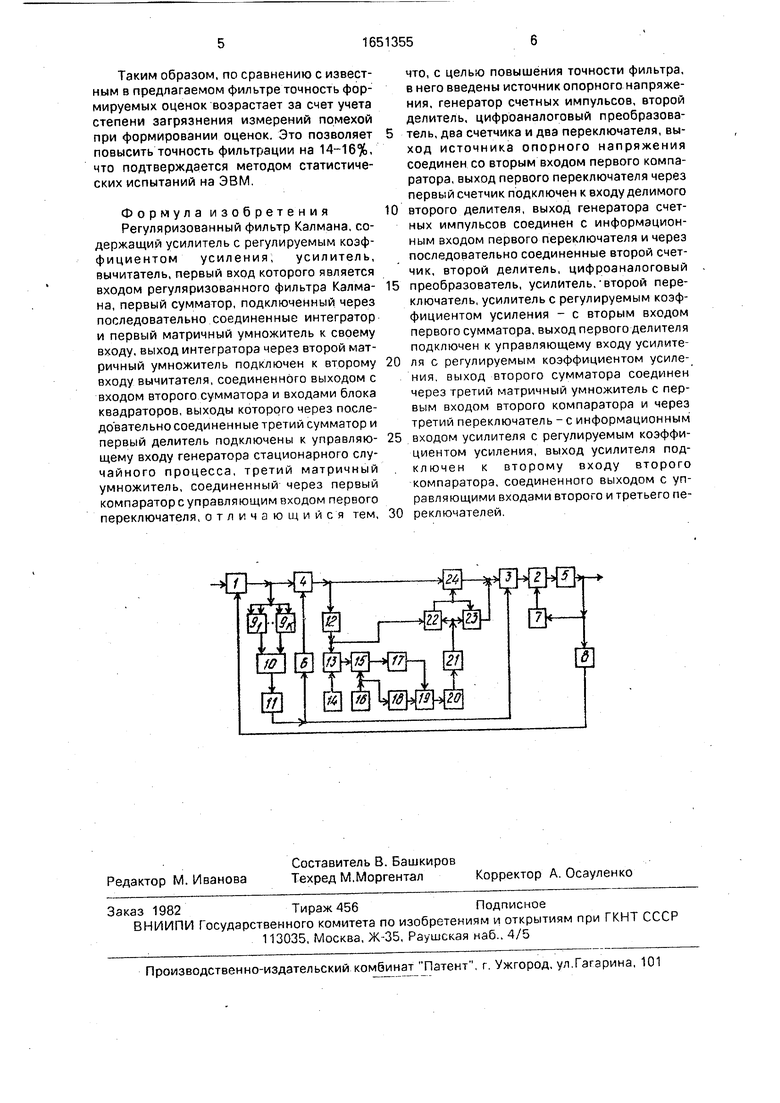
На чертеже представлена структурная схема регуляризованного фильтра Калмана,
Регуляризованный фильтр Калмана содержит вычитатель 1, первый сумматор 2, усилитель 3 с регулируемым коэффициентом усиления, второй сумматор 4, интегратор 5, генератор 6 стационарного случайного процесса, первый 7 и второй 8 матричные умножители, блок 9 квадраторов, третий сумматор 10, первый делитель 11, третий матричный умножитель 12, первый компаратор 13, источник 14 опорного напряжения, первый переключатель 15, генератор 16 счетных импульсов, первый 17 и второй 18 счетчики, второй делитель 19,
цифроаналоговый преобразователь 20, усилитель 21, второй компаратор 22, второй 23 и третий 24 переключатели.
Фильтр работает следующим образом.
На первый вход вычитателя 1 поступает n-мерный сигнал, не имеющий шума в К составляющих, а на второй вход- прогнозируемое измерение H(t)Xo{t) от второго матричного умножителя 8. На выходе вычитателя 1 образуется невязка
еМ ЭД-Н(т.)(дЮ
в которой К известных составляющих подаются на входы квадраторов (каждая составляющая на свой блок).
На выходах блока 9 образуются величины, которые складываются на третьем сумматоре Ю и делятся на величину К в делителе 11 Таким образом, на выходе делителя 11 образуется величина интенсивности стабилизирующего шума
О
ел
СА) СЛ
сл
a(t)
4.1/«.
1
которая подается на генератор 6 стационарного случайного процесса в качестве управляющей величины и на управляющий вход усилителя 3.
С выхода генератора 6 шум a(t) поступает на второй вход второго сумматора 4, на первый вход которого подаются известные (&ез шума) К составляющие невязки Ј (Т.)отвычитателя 1. На выходе второго сумматора 4 образуется зашумленная невязка
Јa(t)e(t)(t), которая подается на информационный вход фетьего переключателя 24 и на вход третьего матричного умножителя 12, в котором производится нормирование невязки. Нормирование заключается в переходе к модифицированной невязке, составляющие шума которой некоррелированы между собой и имеют единичную дисперсию. Этот переход осуществляется путем умножения невязки на матрицу, которая находится из условияi
ТТАТ Е, где Т - матрица нормировки;
А - корреляционная матрица немодифицированной невязки, которая равна А H(t)Vj(t)HT(t) + R;
Е - единичная матрица.
Нормированная невязка поступает на первые входы первого 13 и второго 22 компараторов,
В предлагаемом фильтре вычисление коэффициента загрязнения е производится по количеству измерений, ошибка которых превышает Зет. Поскольку измерения поступают непрерывно, то подсчет этого коли- чества можно произвести путем дискретизации процесса измерений. С этой целью в устройство введен генератор 16 счетных импульсов..С выхода генератора 16 счетные импульсы поступают на второй счетчик 18 и информационный вход первого переключателя 15, При превышении сигнала с третьего матричного умножителя 12 над уровнем источника 14 опорного напряжения сигнал с компаратора 13 отпирает переключатель 15, который пропускает счетные импульсы с выхода генератора 16 счетных импульсов на вход первого счетчика 17. Таким образом, на выходе второго делителя 19 получают отношение
EPS -Na N
где - Na - число измерений, дисперсия которых превышает Зет;
N - число всех измерений, подлежащих обработке.
Для эргодического процесса величина EPS при увеличении длительности сеанса
измерений равна оценке коэффициента загрязнения е,
Таким образом, полученное с выхода второго делителя 19 заключение EPS, преобразованное к аналоговому виду в цифроаналоговом преобразователе 20, подается на вход усилителя 21, на выходе которого осуществляется вычисление порогового значения Кр.
Рассчитанное значение Кр с выхода усилителя 21 подается на второй вход второго компаратора 22 и на информационный вход второго переключателя 23. В случае превышения сигнала с второго усилителя над сигналом с третьего матричного умножителя 12
сигнал с второго компаратора 22 открывает третий переключатель 24 и запирает второй переключатель 23 В результате на вход усилителя 3 поступает зашумленная невязка Јa(t) . На выходе усилителя 3 вычисляется регуляризованный коэффициент усиления
К а (0 V (t)rf (t) ЧЬ (t) + a (t), где Vx(t) - определяется из уравнения Vx(t) F(t)Vx(t) + Vx(t)P(t) + G(t)4V(t)GT(t) - Vx(t) hf (t) 4V(t) + «(t)E Г1 H(t) Vx(t), и поправки , X#(t) (t) , учитывающей поступившие измерения через не- вязку. В этом случае на первом сумматоре 2 происходит сложение предсказанной оценки F (t) XQ (t) с выхода первого матричного
умножителя 7 и поправки , X a (t) с выхода усилителя 3.
На выходе интегратора 5 оценка формируется в соответствии с дифференциальным уравнением
(t) F(t)Xa(t) + ,Xa(t)
В противном случае при превышении
сигнала с выхода третьего матричного умножителя 12 над сигналом с усилителя 21 сигнал с второго компаратора 22 запирает переключатель 24 и отпирает переключатель 23. На вход усилителя 3 проходит пороговое значение Кр,и поправка на его выходе формируется в соответствии с формулой
.Xa(t)J.Ka-Kp, т.е. поступившие измерения учитываются в зависимости от рассчитанного коэффициен
та загрязнения.
В этом случае оценка на выходе интегратора 5 строится в соответствии с дифференциальным уравнением
X(t) F(t) X а W + .X a (t).
Таким образом, по сравнению с известным в предлагаемом фильтре точность формируемых оценок возрастает за счет учета степени загрязнения измерений помехой при формировании оценок. Это позволяет повысить точность фильтрации на 14-16%, что подтверждается методом статистических испытаний на ЭВМ.
Ф о р м у л а и з о б р е т е н и я
Регуляризованный фильтр Калмана, содержащий усилитель с регулируемым коэффициентом усиления, усилитель, вычитатель, первый вход которого является входом регуляризованного фильтра Калма- на, первый сумматор, подключенный через последовательно соединенные интегратор и первый матричный умножитель к своему входу, выход интегратора через второй матричный умножитель подключен к второму входу вычитателя, соединенного выходом с входом второго сумматора и входами блока квадраторов, выходы которого через последовательно соединенные третий сумматор и первый делитель подключены к управляю- щему входу генератора стационарного случайного процесса, третий матричный умножитель, соединенный через первый компаратор с управляющим входом первого переключателя, отличающийся тем,
что, с целью повышения точности фильтра, в него введены источник опорного напряжения, генератор счетных импульсов, второй делитель, цифроаналоговый преобразователь, два счетчика и два переключателя, выход источника опорного напряжения соединен со вторым входом первого компаратора, выход первого переключателя через первый счетчик подключен к входу делимого второго делителя, выход генератора счетных импульсов соединен с информационным входом первого переключателя и через последовательно соединенные второй счетчик, второй делитель, цифроаналоговый преобразователь, усилитель, второй переключатель, усилитель с регулируемым коэффициентом усиления - с вторым входом первого сумматора, выход первого делителя подключен к управляющему входу усилителя с регулируемым коэффициентом усиления, выход второго сумматора соединен через третий матричный умножитель с первым входом второго компаратора и через третий переключатель - с информационным входом усилителя с регулируемым коэффициентом усиления, выход усилителя подключен к второму входу второго компаратора, соединенного выходом с управляющими входами второго и третьего переключателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регуляризованный фильтр Калмана | 1987 |
|
SU1434540A2 |
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Регуляризованный фильтр Калмана | 1985 |
|
SU1317652A1 |
| МОДИФИЦИРОВАННЫЙ ФИЛЬТР КАЛМАНА | 1992 |
|
RU2160496C2 |
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ С АМПЛИТУДНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2042194C1 |
| Регуляризованный фильтр | 1990 |
|
SU1739482A1 |
| Двумерный фильтр | 1988 |
|
SU1555829A1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| Устройство для определения закона распределения случайной величины | 1986 |
|
SU1425713A1 |
Изобретение относится к вычислительной технике и может быть использовано для получения оценок состояния сложных технических систем и решения задач навигации. Цель изобретения - повышение точности фильтрации. Регуляризованный фильтр Калмана содержит вычитатель 1, первый сумматор 2, усилитель 3 с регулируемым коэффициентом усиления, второй сумматор 4, интегратор 5, генератор 6 стационарного случайного процесса, первый 7 и второй 8 матричные умножители, блок 9 квадратов, третий сумматор 10, первый делитель 11, третий матричный умножитель 12, первый компаратор 13, источник 14 опорного напряжения, первый переключатель 15. генератор 16 счетных импульсов, первый 17 и второй 18 счетчики второй делитель 19, цифроаналоговый преобразователь 20, усилитель 21, второй компаратор 22, второй 23 и третий 24 переключатели. Цель изобретения достигается за счет введения блоков 14,16-20;22-24 1 ил.
ЈЈ
ii
т-ш
II
W Щ
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Регуляризованный фильтр Калмана | 1987 |
|
SU1434540A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
