35
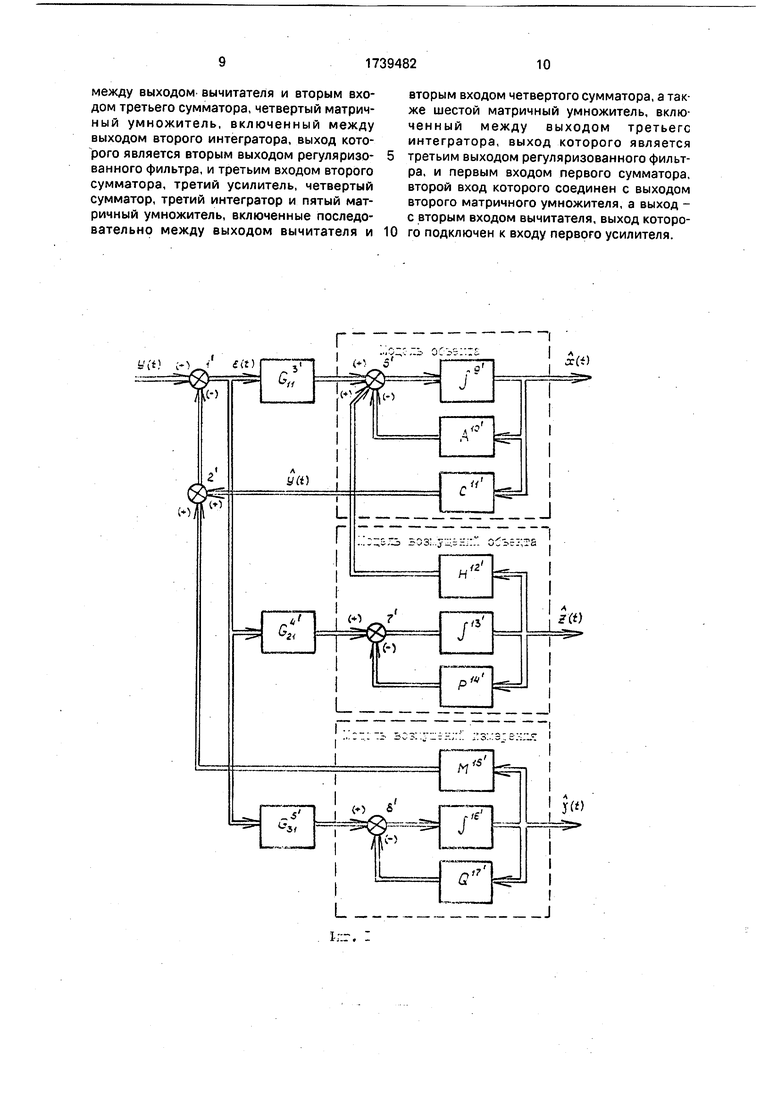
Функциональная схема устройства со
| название | год | авторы | номер документа |
|---|---|---|---|
| Регуляризованный фильтр Калмана | 1985 |
|
SU1317652A1 |
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Регуляризованный фильтр Калмана | 1987 |
|
SU1434540A2 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
Изобретение касается оптимальных систем управления и может быть использовано при построении регуляторов высокой точности для объектов, имеющих недоступные для непосредственного измерения переменные состояния и возмущающие воздействия. Сущность изобретения: регулированный фильтр содержит вычитатель 1 три сумматора 6-8, три усилителя 3-5, три интегратора 9, 13, 16 и шесть матричных умножителей 10-12, 14,15, 17. 1-3-6-9-10- 6, 9-11-2-1, 1-4-7-13-12-6. 13-14-7, 1-5- 8-16-15-2, 16-17-8 Зил.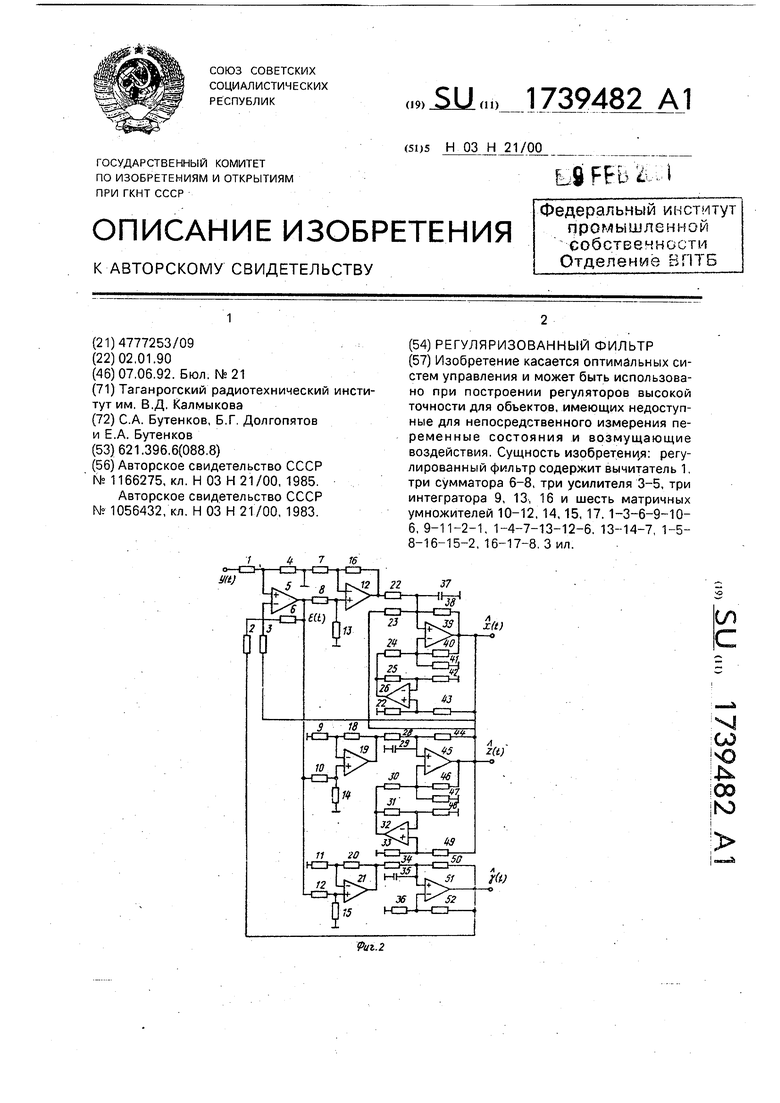
I 0 |МТ
Х(т) Z(t)
J(t)
(2)
где X(t) - вектор состояний объекта; Z(t) - вектор состояний модели возмущений объекта q(t); j(t) - вектор состояний модели возмущений канала измерения q(t); A - матрица динамики объекта; Р - матрица динамики модели возмущений объекта; Q - матрица динамики модели возмущений канала измерения; Ст - матрица состава измеряемых выходов; Нт - матрица состава выходов модели возмущений объекта; Мт - матрица состава выходов модели возмущений канала измерения. Обозначая блочные матрицы из (2) индексом р, можно записать (2) в виде
Xp(t) ApXP(t);(3)
Yp(t) CPTXP(t) .
держит вычитатель 1 . на вход которого подается вектор выхода объекта, второй вход вычитателя соединен с выходом второго сумматора 2 , а выход вычитателя соединен 0 с входами первого 3 . второго 4 и третьего
5усилителей: выход первого усилителя соединен с первым входом первого сумматора
умножителя соединен с вторым входом второго сумматора; шестой матричный умножитель 171 соединяет выход третьего интегратора с вторым входом четвертого сумматора. С выхода первого интегратора снимается сигнал оценки вектора состояний объекта X(t), с выхода второго интегратора - сигнал оценки вектора возмущений объекта Z(t), а с выхода третьего интегратора - сигнал оценки вектора возмущений канала измерения j(t).
Структурная схема устройства содержит суммирующий усилитель 5, первый 17, второй 19 и третий 21 усилители, первый 39, второй 45 и третий 51 интеграторы, интегрирующие конденсаторы 29. 35 и 37, 1, 2, 3, 4. 6,7,8,9, 10, 11, 12, 13, 14, 15, 16, 18,20,22, 23, 24, 25, 27, 28,30, 31, 33,34, 36, 38,40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 52 - резисторы,
Рассмотрим работу фильтра на примере объекта первого порядка
xw - ,(t))
(6)
где Ti - постоянная времени объекта, а возмущающее воздействие co(i) имеет вид:
co(t)Biexp(1/T2)
где Та - постоянная времени возмущения. В канале измерения действует возмущение V(t):
V(t)B2 J/(t-r),(8) где / (t) - функция Хевисайда.
Амплитуды возмущений Bi и Ва неизвестны, неизвестны также и моменты переключения т . Тогда уравнение регуляризованного фильтра, асимптотически оценивающего состояние объекта и возмущения У и V, имеет вид
X(t)(t)(t)-X(t)-Kt):
Z(t)(t)-x(t)-j(t);(9)
(t)93(y(t)-x(ttf(t).
Для объекта первого порядка все векторы и матрицы становятся скалярами. На фиг. 2 приведена структурная схема фильтра (9).
Устройство работает следующим образом.
В начальный момент времени на всех интеграторах фильтра существуют нулевые начальные условия (все выходные величины равны нулю). Поскольку на входе фильтра
5 имеется выходной сигнал объекта y(t), на выходе суммирующего усилителя 5 формируется сигнал разности y(t)-x(y)-j(x), который в начальный момент достаточно велик. Этот сигнал через усилители 17, 19 и 21 подается
10 на интеграторы 39, 45 и 51, В процессе интегрирования на выходах интеграторов формируются сигналы оценок. Если фильтр асимптотически устойчив (т.е. коэффициенты усиления усилителей 17, 19 и 21 выбраны
15 правильно), то разностный сигнал на выходе усилителя 5 стремится к нулю. Скорость уменьшения разностного сигнала, которая определяет быстродействие фильтра, может быть сколь угодно большой (она опреде20 ляется коэффициентами усиления фильтра), если объект полностью наблюдаем.
Каждый раз при изменении амплитуд воздействий СУ и V на выходе усилителя 5 будет появляться разностный сигнал, вызы25 вающий переходный процесс и подстройку моделей возмущений,
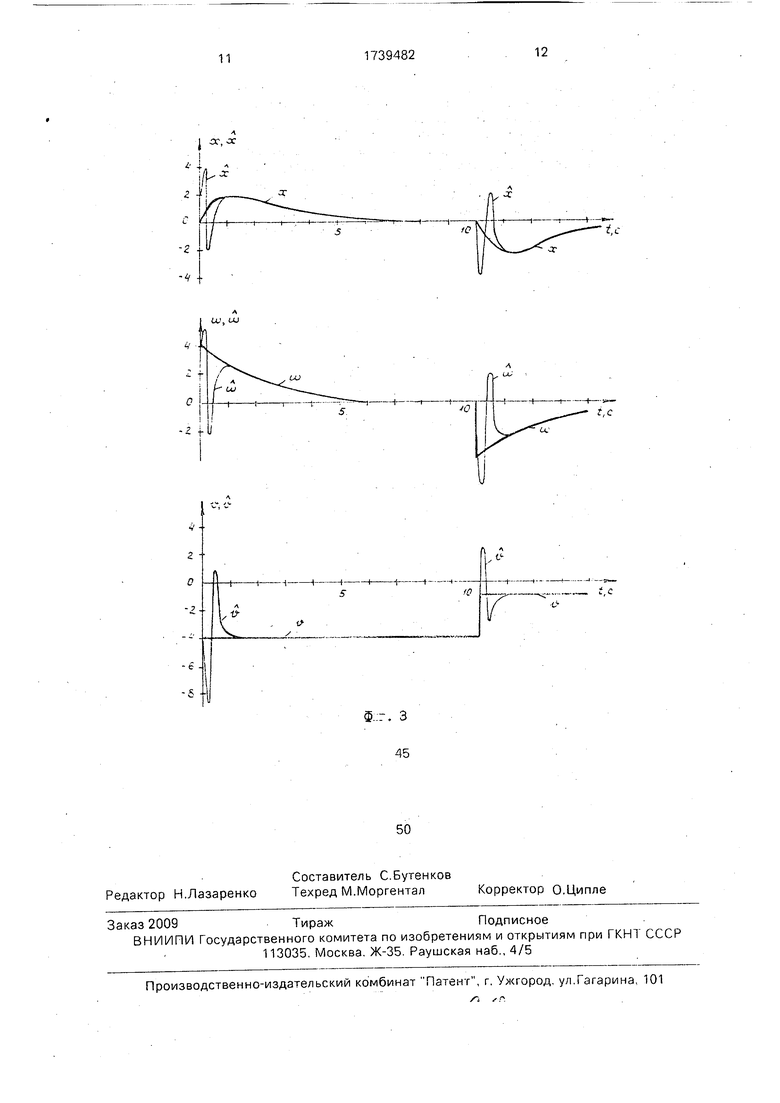
На фиг. 3 приведены осциллограммы формирования оценок состояния и возмущений объекта (6), полученные на модели,
30 построенной на АВК-31 с фильтром по схеме фиг. 2 для и . Амплитуды возмущений со и V выбирались случайным образом.
Фиг. 3 показывает характерные особен35 ности регуляризованного фильтра: оценки асимптотически устойчивы на интервалах постоянства амплитуд возмущений; при изменении амплитуд в фильтре возникает переходный процесс, приводящий к
40 формированию новых оценок; измеряется только выход объекта.
Формула изобретения Регуляризованный фильтр, содержащий вычитатель, первый вход которого яв45 ляется входом регуляризованного фильтра, первый сумматор, последовательно соединенные первый усилитель, второй сумматор и интегратор, выход которого подключен к входам первого и второго матричных умно50 жителей, выход первого из которых соединен с другим входом первого сумматора, а выход интегратора является первым выходом регуляризованного фильтра, отличающийся тем, что, с целью расширения
55 функциональных возможностей путем обеспечения оценки вектора возмущений, введены второй усилитель, третий сумматор, второй интегратор и третий матричный умножитель, включенные последовательно
между выходом вычитателя и вторым входом третьего сумматора, четвертый матрич- ный умножитель, включенный между выходом второго интегратора, выход которого является вторым выходом регуляризо- ванного фильтра, и третьим входом второго сумматора, третий усилитель, четвертый сумматор, третий интегратор и пятый матричный умножитель, включенные последовательно между выходом вычитателя и
Г
0
вторым входом четвертого сумматора, а также шестой матричный умножитель, включенный между выходом третьего интегратора, выход которого является третьим выходом регуляризованного фильтра, и первым входом первого сумматора, второй вход которого соединен с выходом второго матричного умножителя, а выход - с вторым входом вычитателя, выход которого подключен к входу первого усилителя.
I 1М
Ш, AJ
-.I
1-
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Регуляризованный фильтр Калмана | 1982 |
|
SU1056432A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
