Изобретение относится к сельскохозяйственному машиностроеишо, в частности к машинам для уборки корнеклубнеплодов .
Целью изобретения является повышение качества вьшолнения технологического процесса копирования почвы при уборке корнеклубнегьподов с
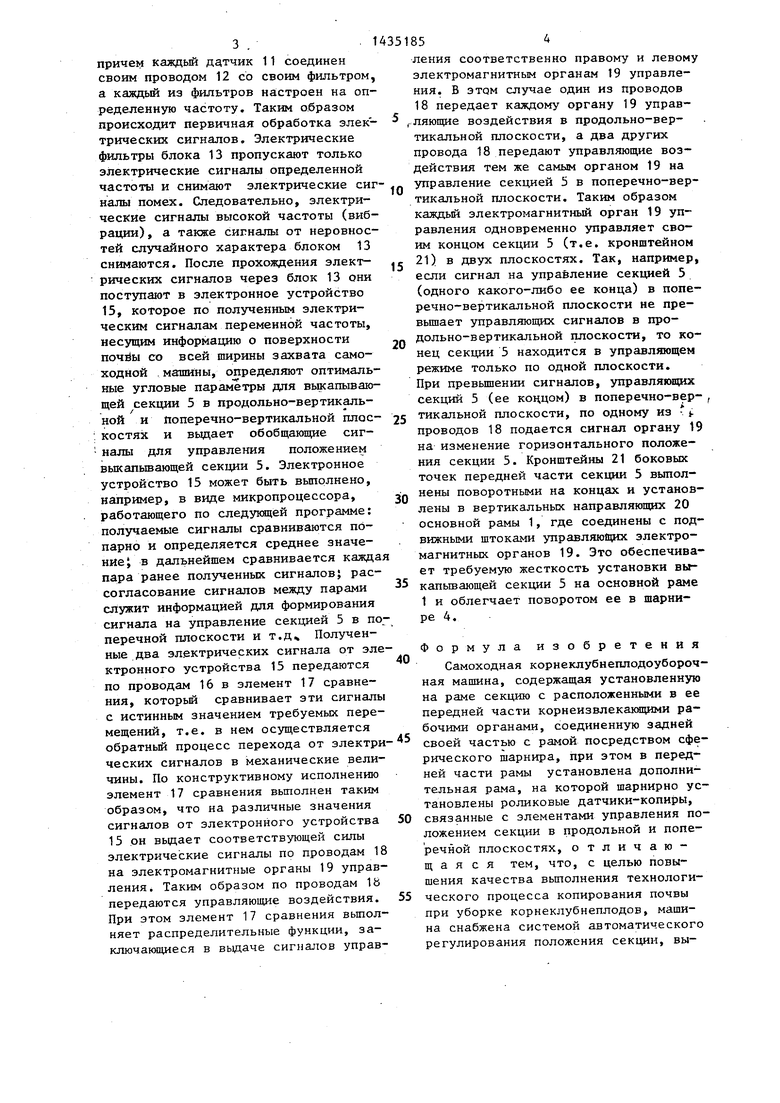
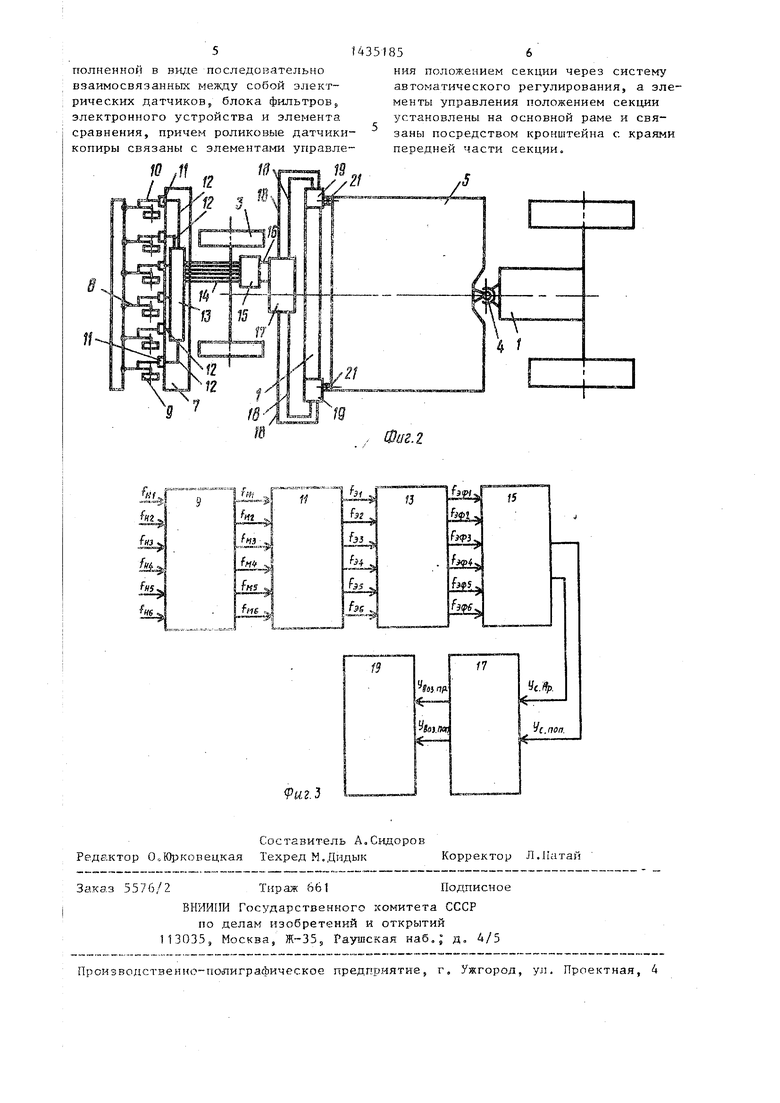
На фиг.1 изображена самоходная корнеклубнеплодоуборочная машина, вид сбоку; на фиг,2 - то же, вид сверху на фиг,3 - блок-схема соединения элементов системы автоматического регулирования положения секции рабочих органов корнеклубнеплодоубо- рочной мапшны, oбec Ieчивaющи: процес .копирования поверхности почвы, На фиг,3 обознач:ены: . - неровности поверхности почвы в междурядья посевов корнеплодов, они же являются входными воздействиями на систему управления-, f.,.-f ,. механические не личины т
M-l Мб
,ё, амплитуды неровностей
нитными органами 19 управления, установленными на основной раме 1 перед выкапывающей секцией 5. На секции 5 имеются вертикальные направляющие 20 с установленными в них поворотными кронштейнами 21. Последние закреплены в крайних точках выкапьюающей секции 5 и связаны со штоками электромагнитных органов 19. Электрическая часть системы управления подключена к источнику питания (не показан).
Самоходная корнеклубнеплодоуборочная машина работает следующим образом .
Выкапьшающая секция 5 с помощыо электромагнитньк органов 19 , управле- ния опускается в рабочее положение, при этом глубина хода в почве выкапывающих рабочих органов 6 устанавливается на трубуемую (фиксируемую)- величину. Эта фиксированная величина в процессе работы машины служит нулевьм уровнем для органов системы управ
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующее устройство многорядной корнеклубнеуборочной машины | 1985 |
|
SU1287769A1 |
| Многорядная корнеклубнеуборочная машина | 1984 |
|
SU1210703A1 |
| Корнеклубнеуборочная машина | 1983 |
|
SU1130222A1 |
| Многорядная корнеклубнеуборочная машина | 1982 |
|
SU1135447A1 |
| Корнеуборочная машина | 1983 |
|
SU1153855A1 |
| Многорядная корнеуборочная машина | 1985 |
|
SU1281193A1 |
| Корнеуборочная машина | 1985 |
|
SU1351534A1 |
| Корнеклубнеуборочный комбайн | 2016 |
|
RU2626758C1 |
| Корнеклубнеуборочный комбайн | 2016 |
|
RU2626720C1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ КОМБАЙН | 2015 |
|
RU2584475C1 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к машинам для.убор- ки корнеклубнеплодов. Целью изобретения является повышение качества выполнения технологического процесса копирования почвы при уборке корнеклубнеплодов. На раме 1, имеющей ходовые 2 и управляемые 3 колеса, посредством сферического шарнира 4 ус10 тановлена выкапывающая секция 5 с рабочими органами 6. В передней части машины смонтирована рамка 7, на которой посредством шаровых шарниров 8 установлены датчики-копиры Э. Датчики 9 через тяги 10 посредством системы автоматического регулирования положения секции 5 связаны с электромагнитными органами 19 управления положения секции 5. Система автоматического управления вьшолнена в виде последовательно взаимосвязанных между собой электрических датчиков 11, блока 13 фильтров, электронного устройства 15 и элемента 17 сравнения и связана с органами 19 управления посредством проводных линий 18. Система автоматического регулирования положения секции 5 обеспечивает получение управляющего сигнала регулирования секции как в продольно-вертикальной, так и в поперечно-вертикальной плоскостях со всей ширины захвата машины. 3 ил. Ф сл . 00 ел 00 01
поверхности почвы} fgi-f 3 - электри- 25 ления выкапьгаающей секцией 5. Роли.ковые датчики-копиры 9 также опускаются в рабочее положение. Машина движется по рядкам убираемых корнеплодов, при этом ходовые 2 и управляемые 3 колеса обеспечивают горизонтальное копирование рядков. Роликовые датчики-копиры 9, подвешенные на рамке 7, с помощью сферических шарниров 8 обкатывают неровности поверхности почвы в междурядьях поческие сигналы переменной частоты} f дф, -f 3|.j - отфильтрованные электрические сигналы переменной частоты YC.OP И YP поп - управляющие сигналы соответственно в продольно-вертикаль- Q ной и поперечно-вертикальной плоскос- тях| Y 601.пр и Y 903.МП - управляющие воздействия соответственно в продольно-вертикальной и поперечно-вертикальной плоскостях.
.ковые датчики-копиры 9 также опускаются в рабочее положение. Машина движется по рядкам убираемых корнеплодов, при этом ходовые 2 и управляемые 3 колеса обеспечивают горизонтальное копирование рядков. Роликовые датчики-копиры 9, подвешенные на рамке 7, с помощью сферических шарниров 8 обкатывают неровности поверхности почвы в междурядьях поСамоходная корнеклубнеплодоубороч- севов корнеплодов, перемещаясь отноная машина содержит основную раму 1, опирающуюся на ходовые 2 и упрайляе- мые колеса 3. На основной раме 1 с помощью сферического шарнира 4 установлена выкапывающая секция 5, прн этом шарнир 4 расположен в задней части секции 5 на оси.ее симметрии. Выкапьгеающая секция 5 имеет в передней своей части рабочие органы 6, В передней части машинь на основной ра ме 1 смонтирована рамка 7, на которой посредством шаровых шарниров 8 установлены роликовые датчики-копиры 9. Датчики 9 через тяги 10 посредством
40
-45
сительно шарниров 8 в продольно-вертикальной плоскости. Таким образом роликовые датчики-копиры 9 преобра- зовьшают неровности почвы в вертикальные перемещения их штоков.Связанные тягами 10 с электрическими датчиками 11 роликовые датчики-копиры 9 свои вертикальные перемещения сообщают штокам электрических датчиков 11, установленных на рамке 7. Основное назначение электрических датчиков 11 заключается в получении информации от датчиков-ко- .пиров 9 и преобразовании механичессистемы автоматического регулирования 50 ких колебательных движений в элект- положения секции рабочих органов, выполненной в виде электрических датчиков 11J связанных проводами 12 с блоком 13 фильтров, подключенных линиями 14 к электронному устройству IS, 55 соединенному проводами 16 с элементом 17 сравнения, связаны посредством проводных линий 18 с электромагрические сигналы. Электрические датчики 11 соединены в электрическую схему, благодаря чему переменные механические амплитуды преобразуются в электрические сигналы переменной частоты. Полученные электрические сигналы от датчиков 11 передаются по проводам 12 на блок 13 фильтров,
ления выкапьгаающей секцией 5. Роли.ковые датчики-копиры 9 также опускаются в рабочее положение. Машина движется по рядкам убираемых корнеплодов, при этом ходовые 2 и управляемые 3 колеса обеспечивают горизонтальное копирование рядков. Роликовые датчики-копиры 9, подвешенные на рамке 7, с помощью сферических шарниров 8 обкатывают неровности поверхности почвы в междурядьях посевов корнеплодов, перемещаясь отно
40
45
сительно шарниров 8 в продольно-вертикальной плоскости. Таким образом роликовые датчики-копиры 9 преобра- зовьшают неровности почвы в вертикальные перемещения их штоков.Связанные тягами 10 с электрическими датчиками 11 роликовые датчики-копиры 9 свои вертикальные перемещения сообщают штокам электрических датчиков 11, установленных на рамке 7. Основное назначение электрических датчиков 11 заключается в получении информации от датчиков-ко- .пиров 9 и преобразовании механических колебательных движений в элект-
рические сигналы. Электрические датчики 11 соединены в электрическую схему, благодаря чему переменные механические амплитуды преобразуются в электрические сигналы переменной частоты. Полученные электрические сигналы от датчиков 11 передаются по проводам 12 на блок 13 фильтров,
причем каждый датчик 11 соединен своим проводом 12 со своим фильтром, а каждый из фильтров на:строен на определенную частоту. Таким образом происходит первичная обработка электрических сигналов. Электрические фильтры блока 13 пропускают только электрические сигналы определенной частоты и снимают электрические сигналы помех. Следовательно, электрические сигналы высокой частоты (вибрации) , а также сигналы от неровностей случайного характера блоком 13 снимаются. После прохождения электрических сигналов через блок 13 они поступают в электронное устройство 15, которое по полученным электрическим сигналам переменной частоты, несущим информацию о поверхности почйы со всей ширины захвата самоходной . машины, определяют оптимальные угловые параметры для выкапьшаю- щей секции 5 в продольно-вертикапь/
ной и Поперечно-вертикальной плоскостях и выдает обобщающие сиг- налы для управления положением ыкапывающей секции 5, Электронное стройство 15 может быть выполнено, апример, в виде микропроцессора, аботающего по следукяцей программе: олучаемые сигналы сравниваются поарно и определяется среднее значеие i в дальнейшем сравнивается каждая ара ранее полученных сигналов} расогласование сигналов между парами служит информацией для формирования сигнала на управление секцией 5 в поперечной плоскости и т.д Полученные два электрических сигнала от электронного устройства 15 передаются по проводам 16 в элемент 17 сравнения, который сравнивает эти сигналы с истинным значением требуемых перемещений, т,е, в нем осуществляется обратньй процесс перехода от электрических сигналов в механические величины. По конструктивному исполнению элемент 17 сравнения выполнен таким образом, что на различные значения сигналов от электронного устройства 15 он выдает соответствующей силы электрические сигналы по проводам 18 на электромагнитные органы 19 управления. Таким образом по проводам 18 передаются управляющие воздействия. При этом элемент 17 сравнения вьшол- няет распределительные функции, заключающиеся в выдаче сигналов управ0
5
0
5
0
5
0
5
0
5
ления соответственно правому и левому электромагнитным органам 19 управления. В этом случае один из проводов 18 передает каждому органу 19 управ- ,ляющие воздействия в продольно-вертикальной плоскости, а два других провода 18 передают управляющие воздействия тем же самым органом 19 на управление секцией 5 в поперечно-вертикальной плоскости. Таким образом каждьй электромагнитный орган 19 управления одновременно управляет своим концом секции 5 (т,е, кронштейном 21) в двух плоскостях. Так, например, если сигнал на управление секцией 5 (одного какого-либо ее конца) в поперечно-вертикальной плоскости не превышает управляющих сигналов в продольно-вертикальной плоскости, то конец секции 5 находится в управляющем режиме только по одной плоскости. При превьшении сигналов, управлякндих секций 5 (ее концом) в поперечно-вер- , тикальной плоскости, по одному из j: проводов 18 подается сигнал органу 19 на изменение горизонтального положения секции 5, Кронштейны 21 боковых точек передней части секции 5 выполнены поворотными на концах и установлены в вертикальных направляющих 20 основной рамы 1, где соединены с подвижными штоками управляющих электромагнитных органов 19, Это обеспечивает требуемую жесткость установки вы- капьшающей секции 5 на основной раме 1 и облегчает поворотом ее в шарнире 4,
Формула изобретения
Самоходная корнеклубнеплодоубороч- ная машина, содержащая установленную на раме секцию с расположенными в ее передней части корнеизвлекакяцими рабочими органами, соединенную задней своей частью с рамой посредством сферического шарнира, при этом в передней части рамы установлена дополнительная рама, на которой шарнирно установлены роликовые датчики-копиры, связанные с элементами управления положением секции в продольной и поперечной плоскостях, отличающаяся тем, что, с целью повышения качества вьшолнения технологического процесса копирования почвы при уборке корнеклубнеплодов, машина снабжена системой автоматического регулирования положения секции, вы11
М -.Г
, Фиг. 2
| Многорядная корнеуборочная машина | 1974 |
|
SU515492A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многорядная корнеклубнеуборочная машина | 1984 |
|
SU1210703A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
