(Л С
О9 9)
14
адресным входам постоянных запоминающих устройство (ПЗУ) 15,16 и одному входу регулятора 7 частоты вращения. Выход регулятора 7 через компаратор 9 соединен с входом дешифратора коман
(ДК) 4,, к другому входу которого под ключей выход задатчика 12 максимального тока статора через блок 8 сравнения и компаратор 10. К остальным входам ДК 4 подключены соответственно выходы D-триггеров 22,23 и объединенные выход и входы датчика 6 и ПЗУ 15,16 соответственно. Выходы ПЗУ 15, 16 соединены с входами цифро-аналоговых преобразователей 17,18, вторые входы к-рых подключены к соответствующим выходам координатного преобразователя 14, а выходы - к входам блока
19суммирования. Вых(д блока 19 через компаратор уровня 11 связан с информационными входами D- триггеров 22,23, счётные входы к-рых подключены к прямому и инверсному вьс;одам СТ 21 о Вход СТ 21 соединен с выходом генератора
20и одним входом элемента 24, другой вход к-рого подключен к прямому выходу СТ 21, а выход элемента 24 - к старшим разрядам ПЗУ 1S,16. Выход датчиков 2 тока соединен со входами ко ординатного преобразсиателя 14 и измерителя 13 модуля мгксимального тока статора, выходом подключенного к второму входу блока 8. 1ход датчика 2 через преобразователь 3 соединен с выходом ДК 4. 1 ил. 1 табл.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1988 |
|
SU1534737A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
Изобретение относится к электротехнике и может быть использовано в промьшшекных системах воспроизведения движения, Hanpimep в станках с числовым программным управлением. Целью изобретения является упрощение электропривода. Для этого он снабжен генератором 20 прямоугольных импульсов, счетным триггером (СТ) 21, D-тригге- рами 22 и 23 и элементом ИСКЛЮЧАЮЩЕЕ ИЛИ 24. На валу синхронного двигателя (СД) 1 установлены датчик 6 поло- жения ротора и тахогенератор 5,выходы к-рых подключены соответственно к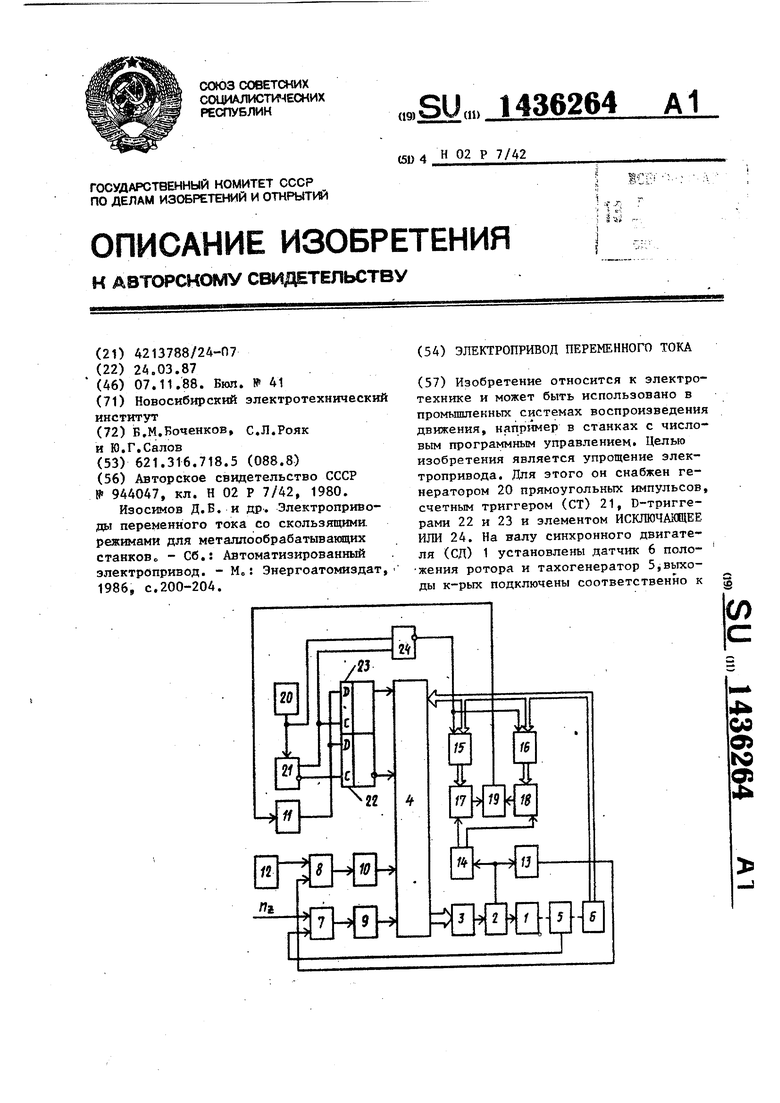
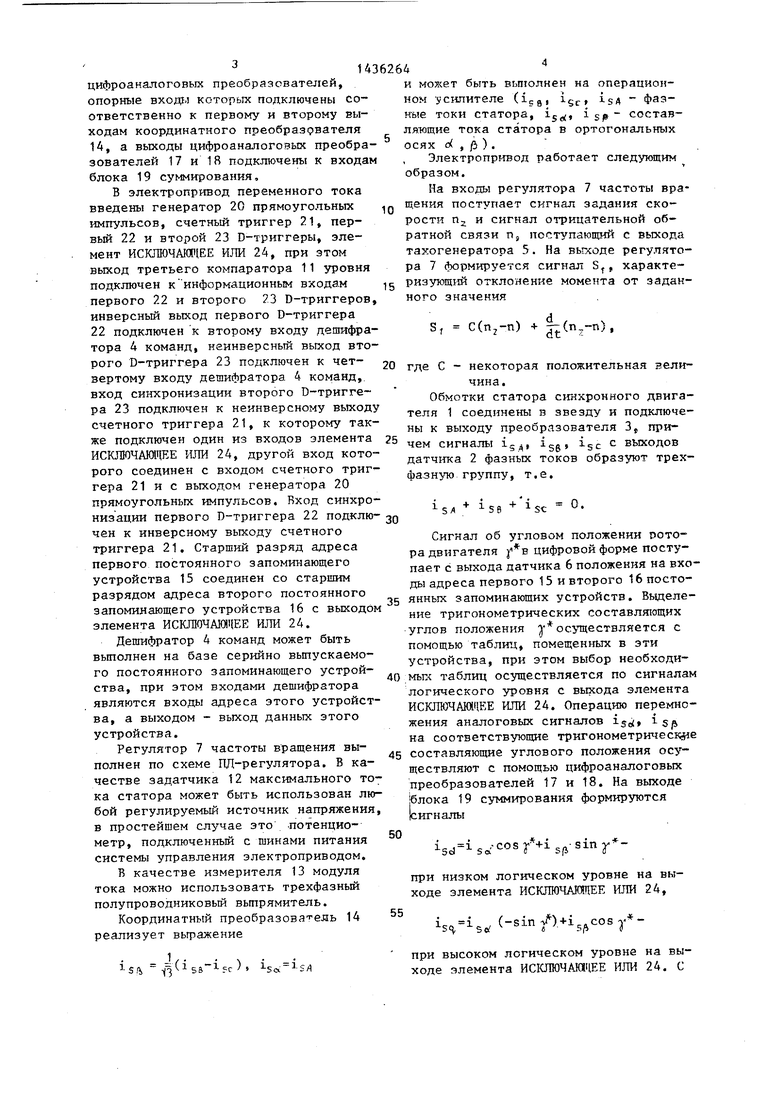
Изобретение относится к электротехнике и может быть использовано в управляемом электроприводе на базе синхронного электродвигателя с магнитоэлектрическим возбуждением, при- меняемым в промьппленных системах воспроизведения движений где требуется высокая точность отработки заданных параметров управления, в частности в станках с числовым программным уп- равлением.
Цель изобретения - упрощение электропривода переменного тока.
На чертеже представлена функциональная схема электропривода переменнего тока.
Электропривод переменного тока содержит синхронный электродвигатель 1 с магнитоэлектрическим возбуждением, фазные обмотки которого через дйтчик 2 фазных токов статора подключены к выходу мостового полупроводникового преобразователя 3, подключенного своим входом к выходу депш4фатора 4 команд, имеющего пять входов, а также тахоге- нератор 5 и датчик 6 положения ротора, сочлененные механически с валом синхронного электродвигателя 1, регулятор 7 частоты вращения, блок 8 сравнения, первый 9, второй 10 и третий 11 компараторы уровня с нелинейными характеристиками типа гистерезис, задатчик 12 максимального тока
статора, измеритель 13 модуля максимального тока статора, координатный преобразователь 34, первое 15 и второе 16 постоянные загоминающие устройства, первый 17 и второй 18 цифро- аналоговые преобразователи, блок 19 .сзт мирования, выход которого подключен к входу третьего компаратора 11 уровня. Выход тахогекератора 5 соединен с одним из регулятора 7 частоты вр ащения, другой вход которого образует вход электропривода, выход регулятора 7 частоты вращения через первый компаратор 9 уровня подключен к первому Bxofy дешифратора 4 команд, выходы дат1ика 2 фазных токов статора подключены к входам ко ординатного преобразователя 14 и измерителя 13 модуля максимального тока статора, выход которого соединен с одним из входов блс:ка 8 сравнения, другой вход которого подключен к за- датчику 12 максимальюго тока статора, а выход блока сргвнения через второй компаратор 10 уровня подключен к третьему входу дешифратора 4 команд, выход датчика 6 полояения ротора подключен к пятому входу дешифратора 4 команд и к входам ад1еса первого 15 и второго 16 постояш ых 3 апоминакядих устройств, выходы да1 ных которых подключены соответствен ;о к информационным входам первого 17 и второго 1В
цифроанапоговых преобразователей, опорные входи которых подключены соответственно к первому и второму выходам координатного преобразователя 14, а выходы цифроаналоговых преобразователей 17 и 18 подключены к входам блока 19 суммирования,
В электропривод переменного тока введены генератор 20 прямоугольных импульсов, счетный триггер 21, первый 22 и второй 23 D-триггеры, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 24, при этом выход третьего компаратора 11 уровня подключен к информационным входам первого 22 и второго 23 D-триггеров, инверсный выход первого D-триггера 22 подключен к второму входу дешифратора 4 команд, неинверсный выход второго D-триггера 23 подключен к чет- вертому входу дешифратора 4 команд, вход синхронизации второго В-тригге ра 23 подключен к неинверсному выходу счетного триггера 21, к которому также подключен один из входов элемента ИСКЛЮЧАЮ111ЕЕ ИЛИ 24, другой вход которого соединен с входом счетного триггера 21 и с выходом генератора 20 прямоугольных импульсов. Вход синхронизации первого D-триггера 22 подклю- чен к инверсному выходу счетного триггера 21. Старший разряд адреса первого постоянного запоминающего устройства 15 соединен со старшим разрядом адреса второго постоянного запоминающего устройства 16 с выходом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24.
Дешифратор 4 команд может быть выполнен на базе серийно выпускаемого постоянного запоминающего устройства, при этом входами дешифратора являются входы адреса этого устройства, а выходом - выход данных этого устройства.
Регулятор 7 частоты вращения выполнен по схеме ПД-регулятора. В качестве задатчика 12 максимального тока статора может быть использован любой регулируемый источник напряжения, в простейшем случае это -потенциометр, подключенный с шинами питания системы управления электроприводом.
В качестве измерителя 13 модуля тока можно использовать трехфазный полупроводниковый вьшрямитель.
Координатный преобразова ель 14 реализует выражение
J/-
si /
аам
1436264
и может быть вьпюлнен на ном усилителе (i
58 I si-1
кые токи статора, ij, ISP составляющие тока статора в ортогональных осях о , /J ) .
Электропривод работает следующим образом.
На входы регулятора 7 частоты врашения поступает сигнал задания скорости П; и сигнал отрицательной обратной связи Hj поступающий с выхода тахогенератора 5. На вьпсоде регулятора 7 формируется сигнал S, характеризующ1й отклонение момента от заданного значения
S, C() + -(П..-П),
где С - некоторая положительная величина.
Обмотки статора синхронного двигателя 1 соединены в звезду и подключены к выходу преобразователя 3, причем сигналы ig 56 SC выходов датчика 2 фазных токов образуют трехфазную группу, т.е.
ЧА 56 + 1st
0.
2о 25 Q
Сигнал об угловом положении ротора двигателя цифровой форме поступает с выхода датчика 6 положения на входы адреса первого 15 и второго 16 посто35 янных запоминающих устройств. Вьщеле- ние тригонометрических составляющих углов положения J осуществляется с помощью таблиц, помещенных в эти устройства, при этом выбор необходи40 мьп таблиц осуществляется по сигналам логического уровня с выхода элемента ИСКЛЮЧАЮ1НЕЕ ИЛИ 24. Операцию перемножения аналоговых сигналов ist isa на соответствующие TpHroHOMeTpH iecKsie
45 составляющие углового положения осуществляют с помощью цифроаналоговых преобразователей 17 и 18. На выходе 1блока 19 суммирования формируются сигналы
50
i5d isa-C sf- isft-sinr
#
при низком логическом уровне на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24,
55
SC 4
(-sin /)+i cos 5ft H
При высоком логическом уровне на выходе элемента ИС1а1ЮЧАЮ ЦЕЕ ИЛИ 24. С
выхода блока 19 суммирования сигналы о компонентах тока статора i, iga. во вращакицейся системе координат поступают на третий компаратор 11 уровня, при этом на его выходе формируется сигнал L2. при низком логическом уровне на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24 и сигнал L4 при высоком логическом зфовне на выходе элемента ИС-; KnrotlAfflDIEE ИЛИ 24, т„е.
Т , если i 0,
если i если
если i. , О,
5сч
. e OЗадатчик 12 максимального тока статора формирует сигнал задания максимального тока статора 2. ° торый в блоке 8 сравнения сравнивается со значением модуля максимального тока макс Изл Кзв Usc i формируемым в измерителе 13 модуля по сигналам igc с выходов датчика 2, На выходе блока 8 сравнения формируется сигнал S3
м а КС 2
-макс ligfll , ligB IJi-sc
который подается на вход компаратора на выходе которого формируется сиг нал L3:
, если S3 , , если S3 0.
С выхода регулятора 7 сигнал S1 подается на вход компаратора 9, при этом на его выходе формируется сигнал L1:
, если S1 0, L1-0, если S1 0.
50
Наличие низкого логического уровня на выходе элемента ИСКЛЮЧАЩЕЕ ИЛИ 24 вызывает формирование на выходе третьего компаратора 11 сигнала L2, при этом с приходом положительного фронта синхроимпульса на вход синхро-55 низации первого D-триггера 22, на его инверсном выходе формируется сигнал L2, который запоминается в первом
П-триггере 22, до п)ихода следуняцего синхроимпульса с иниерсного выхода счетного триггера 2 . Наличие йысоко- го логического уровня на выходе элемента ИСКЛЮЧАМЦЕЕ ИЛИ 24 вызывает формирование на выходе третьего компаратора 11 сигнала L4, при этом с приходом положительного фронта синхроимпульса на вход синхронизации второго D-триггера ;3 на его неинверсном выходе формируе:тся сигнал L4, который запоминаете :-so втором D-триг- гере 23 до прихода следукяцего синхроимпульса с неинверсгого выходи счетного триггера 21. Чг стота синхронизации fс определяется тактовой частотой fp генератора 20 имгульсов. Логичес
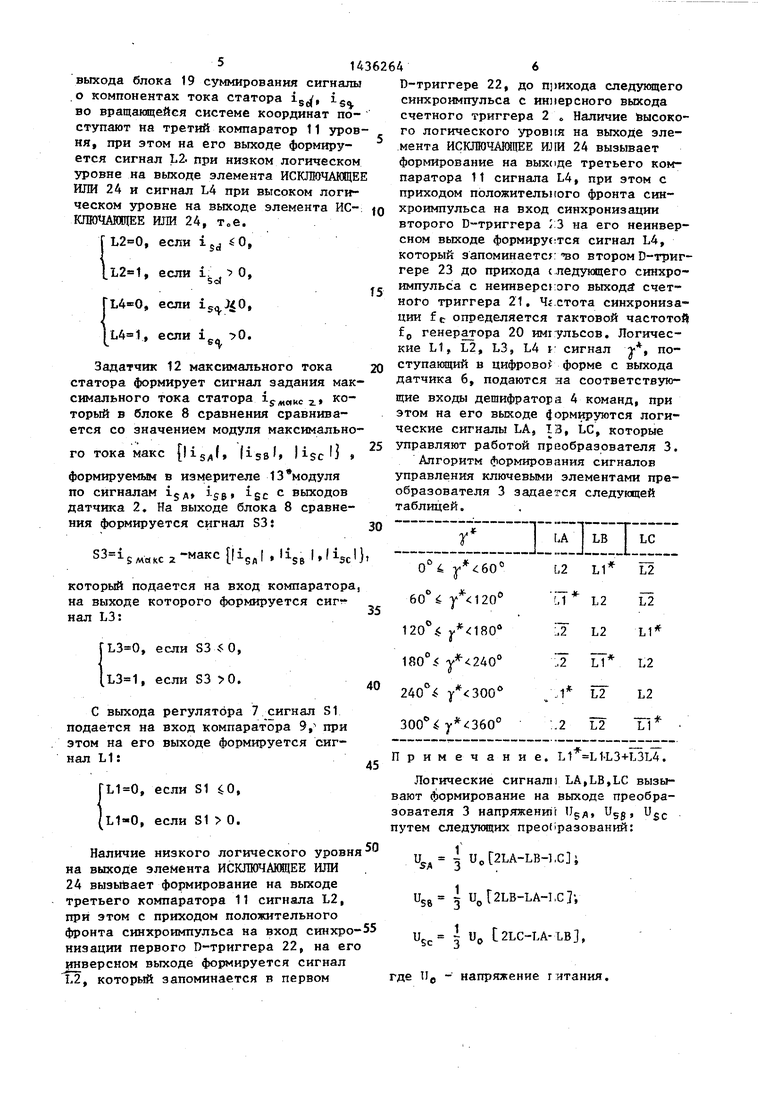
кие L1, L2, L3, L4 I сигнал т-, поступающий в цифровое форме с выхода датчика 6, подаются на соответствующие входы дешифратора 4 команд, при этом на его выходе формируются логические сигналь LAj IB, LC, которые управляют работой преобразователя 3.
Алгоритм формирования сигналов управления ключевыми элементами преобразователя 3 задается следующей таблицей.
Примечание. L1 L1-L3+L3L4.
Логические сигнали LA,LB,LC вызывают формирование на выходе преобразователя 3 напряжени1г Ug, Ugg sc путем следзпощих прео(|разований:
SA 5 Uo 2LA-LB-l,
Ц
S8
и„Г2ЬВ-ЬА-1,,
so 5 о
2LC-LA-LB,
где
о -
напряжение гятания.
Определенный алгоритм формирова- , ния компонентов напряжения статора двигателя USA, Use обеспечивает функционщ ование электропривода в скользящем режиме. Этим достигается стабилизация частоты вращения двигателя 1, ограничение токов статора 5Л 58 5с заданном уровне и обеспечивается равенство нулю продольной составляющей тока статора ig, что определяет наибольший элек- тромагнитный момент двигателя при заданном значении модуля тока стато- Ра.
Таким образом, введение в состав электропривода переменного тока с разрывным управлением генератора прямоугольных импульсов, счетного триггера, первого и второго D-триггеров, элемента ИСКЛЮЧАЩЕЕ ИЛИ позволяет формировать логические сигналы L2 и L4 на соответствующих входах дешифратора команд без использования сложных координатных преобразователей, требующих наличия четьфех цифроана- логовых преобразователей, двух устройств сравнения и четырех компараторов уровня, а следовательно, позволяет конструктивно упростить электропривод.
Формула
изобретения
Электропривод переменного тока, содержащий синхронный электродвигатель с магнитоэлектрическим возбуждением, фазные обмотки которого через датчик фазных токов статора подключены к выходу мостового полупроводникового преобразователя, подключенного своим входом к выходу дешифратора команд, выполненного с пятью входами, тахогенератор и датчик положения ротора, механически сочлененные с валом указанного синхронного электродвигателя, регулятор частоты вращения, блок сравнения, первый, второй и третий компараторы уровня с нелинейными характеристиками типа гистерезис, задатчик максимального тока статора, измеритель модуля максимального тока статора, координатный преобразователь, первый и второй постоянные запоминающие устройства, первый и второй цифроаналоговые пре
тьего компаратора уровня, выход та- хогенератора соединен с одним из входов регулятора частоты вращения другой вход которого образует вход электропривода, выход регулятора частоты вращения через первый коммутатор уровня подключен к первому входу- дешифратора команд, выходы датчика фазных токов статора подключены квхо дам координатного преобразователя и измерителя модуля максимального тока статора, выход которого соединен с с одним из входов блока сравнения, другой вход которого подключен к эа- датчику максимального тока статора, а выход блока сравнения через второй компаратор уровня подключен к третьему входу дешифратора команд, выход . датчика положения ротора подключен к пятому входу дешифратора команд и к входам адреса первого и второго постоянных запоминающих устройств, выходы которых подключены соответственно к информационным входам первого и второго ци4фоаналоговых преобразователей, опорные входы которых подключены соответственно к первому и второму выходам координатного преобразователя, а выходы цифроаналоговых преобразователей подключены к входам блока суммирования, отличающийся тем, что, с целью упрощения, введены генератор прямоугольных импульсов, счетный триггер, первый и второй D-триггеры и элемент ИСКЛЮ-. ;ЧАЮП1ЕЕ ИЛИ, при этом выход третьего компаратора уровня подключен к информационным входам первого и второго D-триггеров, инверсный выход первого D-триггвра подключен к второму входу дешифратора команд, прямой выход второго D-триггера подключен к четвертому входу дешифратора команд, вход в синхронизации второго D-триггера подключен к прямому выходу счетного триггера, к которому подключен .хздин из входов элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, другой вход которого соединен с входом счетного триггера и с выходом ге- нератора прямоугольных импульсов, вход синхронизации первого D-триггера под-, ключен к инверсному выходу счетного триггера, старшие разряды адреса запоминающих устройств объединены и под
| Устройство для управления электродвигателем переменного тока в следящем режиме | 1980 |
|
SU944047A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| йзосимов д.Б | |||
| и др | |||
| Электроприводы переменного тока со скользящими, режимами для металлообрабатьгаанлцих станково - Сб | |||
| Автоматизированный электропривод | |||
| - Мо: Энергоатомиздат, 1986, с.200-204. | |||
