Даь
)
сд
со со со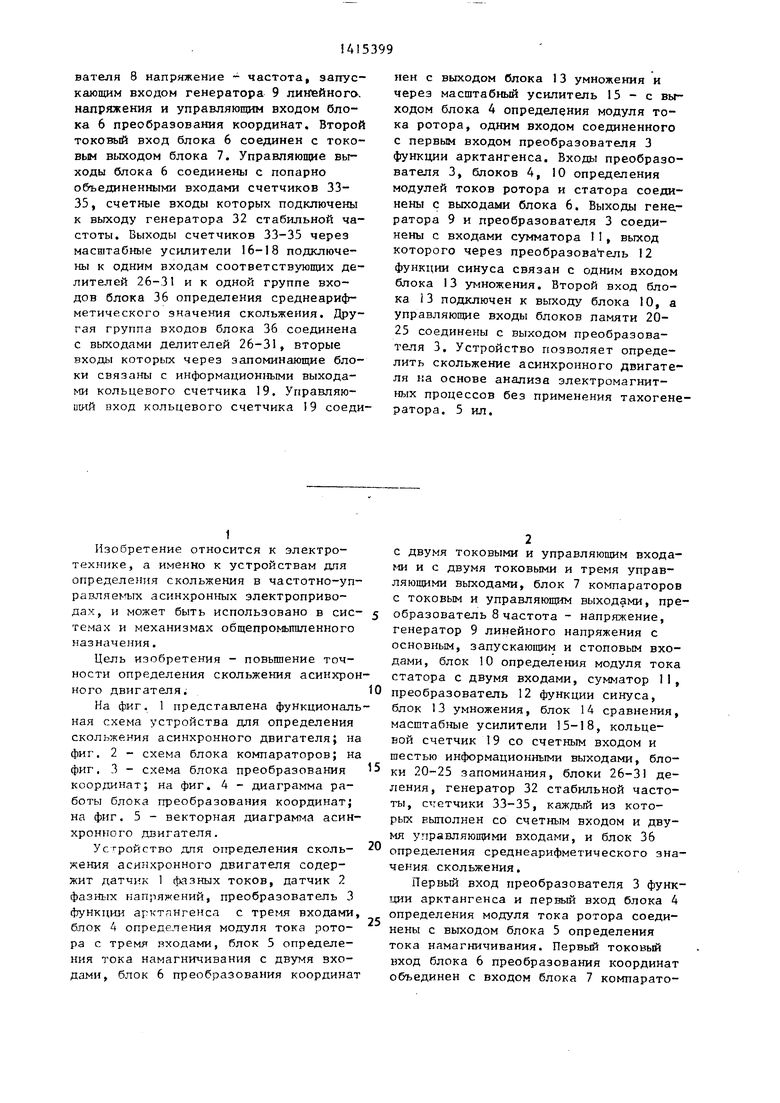
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| Устройство для определения скольжения асинхронного двигателя | 1987 |
|
SU1429037A1 |
| Устройство для определения скольжения асинхронного двигателя | 1988 |
|
SU1525583A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| Асинхронный электропривод | 1982 |
|
SU1117813A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
Изобретение относится к электротехнике и может быть использовано в системах и механизмах общепромьшшэнного назначения. Целью изобретения является повышение точности определения скольжения аси гхронного двигателя. Устройство опредепения скольжения асинхронного двигателя содержит датчик 1 фазных токов и датчик 2 на- пр5окений, подключенные выходами к блоку 3 определения тока намагничивания. В устройство введены блок 7 компараторов и блок 6 преобразования координат, управляющим и токовьгм входами соответственно подключенные к выходу датчика 1. Управляющий выход блока 7 соединен с входом преобразо
Фиг. 1
TtJ
вателя 8 напряжение - частота, запускающим входом генератора 9 лин ейногсх. напряжения и управляющим входом блока 6 преобразования координат. Второй токовый вход блока 6 соединен с токовым выходом блока 7. Управляющие выходы блока 6 соедине1Ш с попарно объединенными входами счетчиков 33- 35, счетные входы которых подключены к вьгходу генератора 32 стабильной частоты. Выходы счетчиков 33-35 через масштабные усилители 16-18 подключены к одним входам соответствующих делителей 26-31 и к одной группе входов блока 36 определения среднеари(}г- метического значения скольжения. Другая группа входов блока 36 соединена с выходами делителей 26-31, вторые входы которых через запоминающие блоки связаны с информационньми выходами кольцевого счетчика 19. Управляющий вход кольцевого счетчика 19 соеди1
Изобретение относится к электротехнике, а именно к устройствам для определения скольжения в частотно-уп- равляеьтых асинхронных электроприводах, и может быть использовано в сие- темах и механизмах общепромышленного назначения,
Цель изобретения - повьшение точности определения скольжения асинхронного двигателя.
На фиг, 1 представлена функциональная схема устройства для определения скольжения асинхронного двигателя; на фиг. 2 - схема блока компараторов; на фиг, 3 - схема блока преобразования координат; на фиг. 4 - диаграмма работы блока преобразования координат; на фиг. 5 - векторная диаграмма асинхронного двигателя.
Устройство для отфеделения сколь- жения асинхронного двигателя содержит датчик 1 фазных токов, датчик 2 фазных нап 1яжений, преобразователь 3 функции арктангенса с тремя входами, блок 4 определения модуля тока ротора с тремя входами, блок 5 определения тока намагничивания с двумя входами, блок 6 преобразования координат
нен с выходом блока 13 умножения и через масштабный усилитель 15 - с выходом блока 4 определения модуля тока ротора, одним входом соединенного с первым входом преобразователя 3 функции арктангенса. Входы преобразователя 3, блоков 4, 10 определения модулей токов ротора и статора соединены с выходами блока 6. Выходы генератора 9 и преобразователя 3 соединены с входами сумматора 1, выход которого через преобразователь 12 функции синуса связан с одним входом блока 13 умножения. Второй вход блока 13 подключен к выходу блока 10, а управляющие входы блоков памяти 20- 25 соединены с выходом преобразователя 3. Устройство позволяет определить скольжение асинхронного двигателя на основе анализа электромагнитных процессов без применения тахогене ратора. 5 ил.
с двумя токовыми и управляющим входами и с двумя токовыми и тремя управляющими выходами, блок 7 компараторов с токовым и управляющим выходами, преобразователь 8 частота - напряжение, генератор 9 линейного напряжения с основным, запускающим и стоповым входами, блок 10 определения модуля тока статора с двумя входами, сумматор II, преобразователь 12 функции синуса, блок 13 умножения, блок 14 сравнения, масщтабные усилители 15-18, кольцевой счетчик 19 со счетным входом и шестью информационными выходами, блоки 20-25 запоминания, блоки 26-31 деления, генератор 32 стабильной частоты, счетчики 33-35, каждый из которых выполнен со счетным входом и двумя управляющими входами, и блок 36 определения среднеарифметического значения скольжения.
Первый вход преобразователя 3 функции арктангенса и первый вход блока 4 определения модуля тока ротора соединены с выходом блока 5 определения тока намагничивания. Первый токовый вход блока 6 преобразования координат объединен с входом блока 7 компараторов 7 и с первым входом блока 5 определения тока намагничивания и подключен к выходу блока датчиков 1 фазных токов. Управляющий выход блока 7 компараторов соединен с входом преобразователя 8 частота - напряжение, запускающим входом генератора 9 линейного напряжения и с управляющим входом блока 6 преобразования координат,
Токовый выход блока 7 компараторов соединен с вторым токовым входом блока 6 преобразования координат, токовые выходы которого соединены соответственно с вторыми и третьими входами блока 4 определения модуля тока ротора и преобразователя 3 функции арктангенса и соответствующими входами блока 10 определения модуля тока статора, выход которого соединен с одним их входов блока 13 умножения. Выход блока 13 умножения соединен с первым входом блока 14 сравнения. Выход преобразователя 3 арктангенса соединен с одним из входов сумматора 11, вы- ход которого через преобразователь 12 функции синуса соединен с вторым входом блока 13 умножения. Второй вход блока 14 сравнения через пср зый масштабный усилитель 15 соединен с выходом блока 4 определения модуля тока ротора, выход блока 14 сравнения соединен со стоповым входом генератора 9 линейного напряжения и со счетным входом кольцевого счетчика 19, выходы которого подключены к управляющим входам шести блоков запоминания 20-25, вторые входы которых объединены и подключены к выходу преобразователя 3 функции арктангенса. Выходы блоков 20-25 запоминания подключены к первым входам соответствующих блоков 26-31 деления. Вторые входы блоков 26 и 29 деления соединены через масштабный усилитель 16 с выходом счетчика 33, вторые входы блоков 27 и 30 деления - через масштабный усилитель 17 с выходом счетчика 34, вторые входы блоков 28 и 31 деления - через масштабньй усили- тель 18 с выходом счетчика 35. Счетные входы счетчиков 33-35 подключены к выходу генератора 32 стабильной частоты.
Управляю111,ие выходы блока 6 пре-- образования координат подключены к попарно объединенным управляю дим входам счетчиков 33-35. Выход преобразователя В частота - напряжение соединен с основным входом генератора 9 линейного напряжения, выход которого соединен с вторым входом сумматора 1 1, Второй вход блока 5 определения тока намагничивания соединен с выходом датчика 2 фазных напряжений.
Выходы блоков 26-31 деления и масштабных усилителей 16-18 соединены с входами блока 36 определения среднеарифметического значения скольжения, выход которого образует выход устройства,
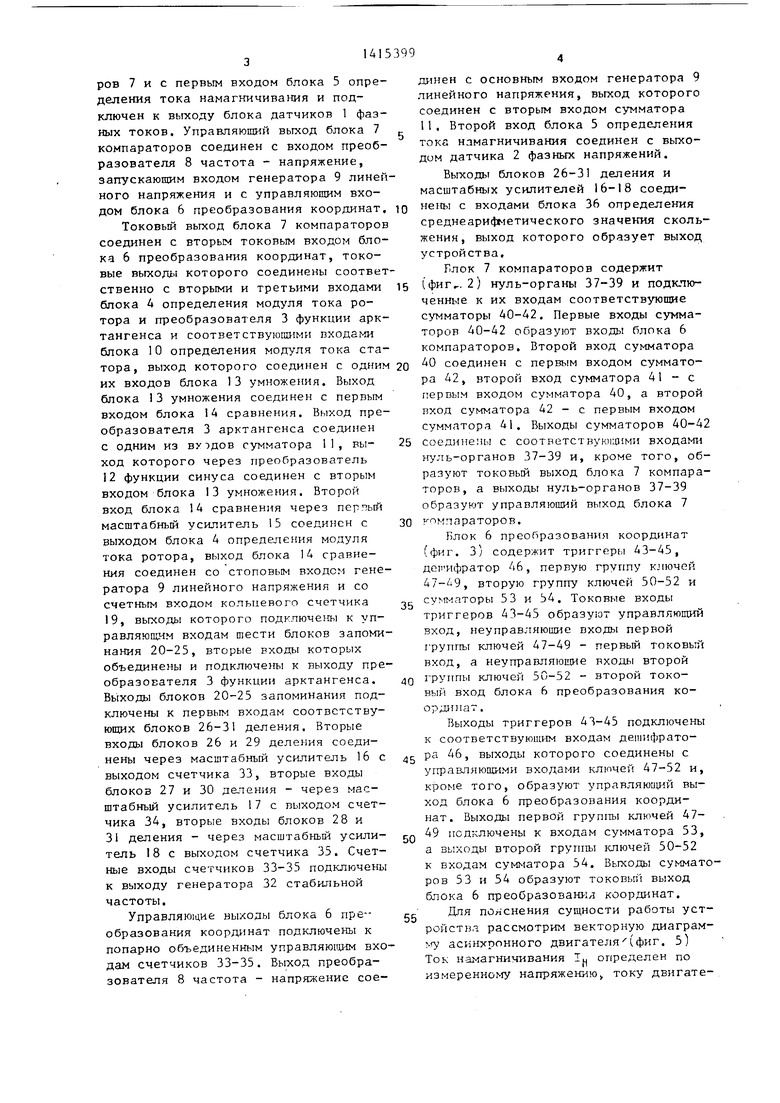
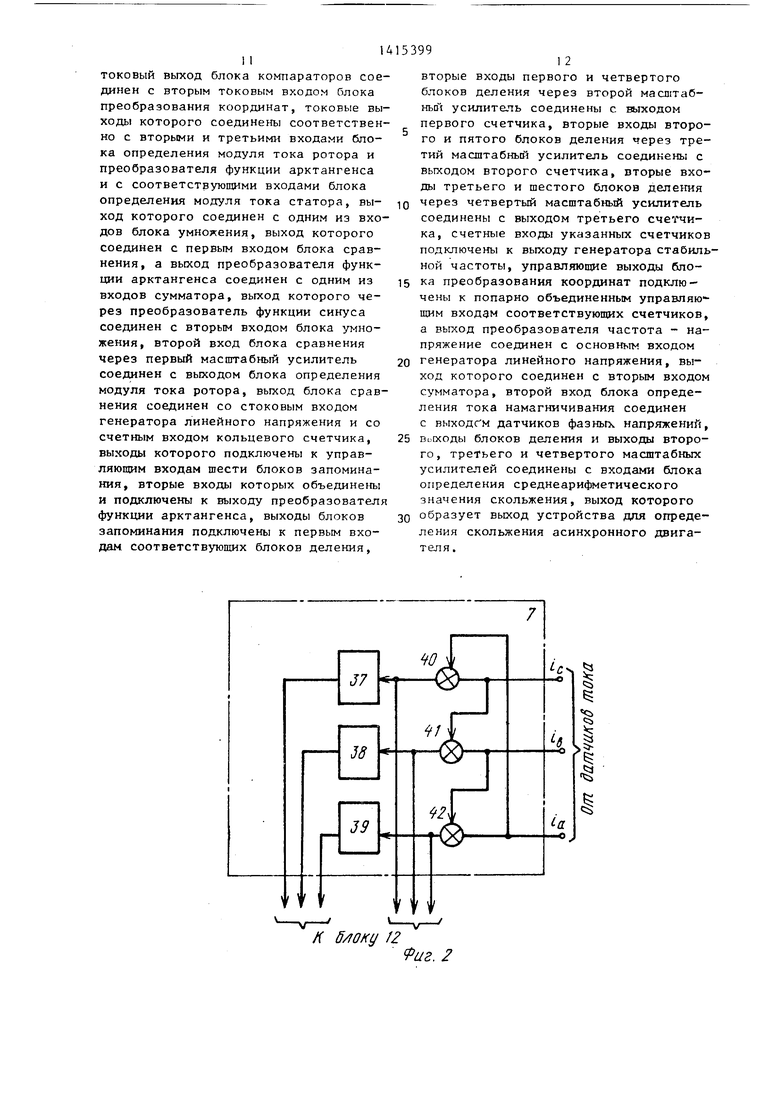
Блок 7 компараторов содержит (фиг,., 2) нуль-органы 37-39 и подключенные к их входам соответствующие сумматоры 40-42. Первые входы сумматоров 40-42 образуют входь блока 6 компараторов. Второй вход сумматора 40 соединен с первым входом сумматора 42, второй вход сумматора 41 - с первым входом сумматора 40, а второй вход сумматора 42 - с первым входом сумматора 41. Выходы сумматоров 40-4 соединены с соответствукнцими входами нуль-органов 37-39 и, кроме того, образуют токовый выход блока 7 компараторов, а выходы нуль-органов 37-39 образуют управляющий выход блока 7 компараторов.
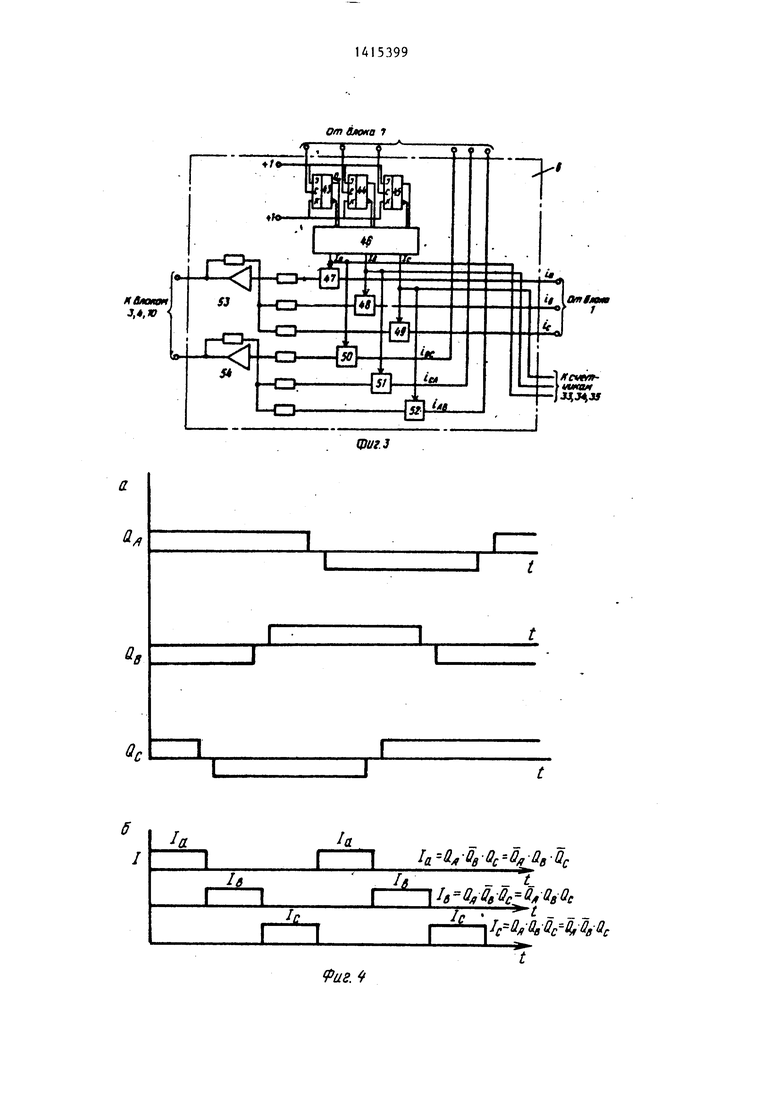
Блок 6 преобразования координат (фиг. З) содержит триггеры 43-45, деи ифратор 46, первую группу ключей , вторую группу ключей 50-52 и сумматоры 53 и 54, Токовые входы триггеров 43-45 образуют управляющий вход, неуправляющие входы первой группы ключей 47-49 - первый токовый вход, а неуправляющие входы второй группы ключей 50-52 - второй токовый вход блока 6 преобразования координат.
Выходы триггеров 43-45 подключены к соответствующим входам дешифратора 46, выходы которого соединены с управляющими входами ключей 47-52 и, кроме того, образуют управляющий выход блока 6 преобразования координат. Выходы первой группы ключей 47- 49 подключены к входам сумматора 53, а выходы второй группы ключей 50-52 к входам сумматора 54, Выходы сумматоров 53 и 54 образуют токовый выход блока 6 преобразования координат.
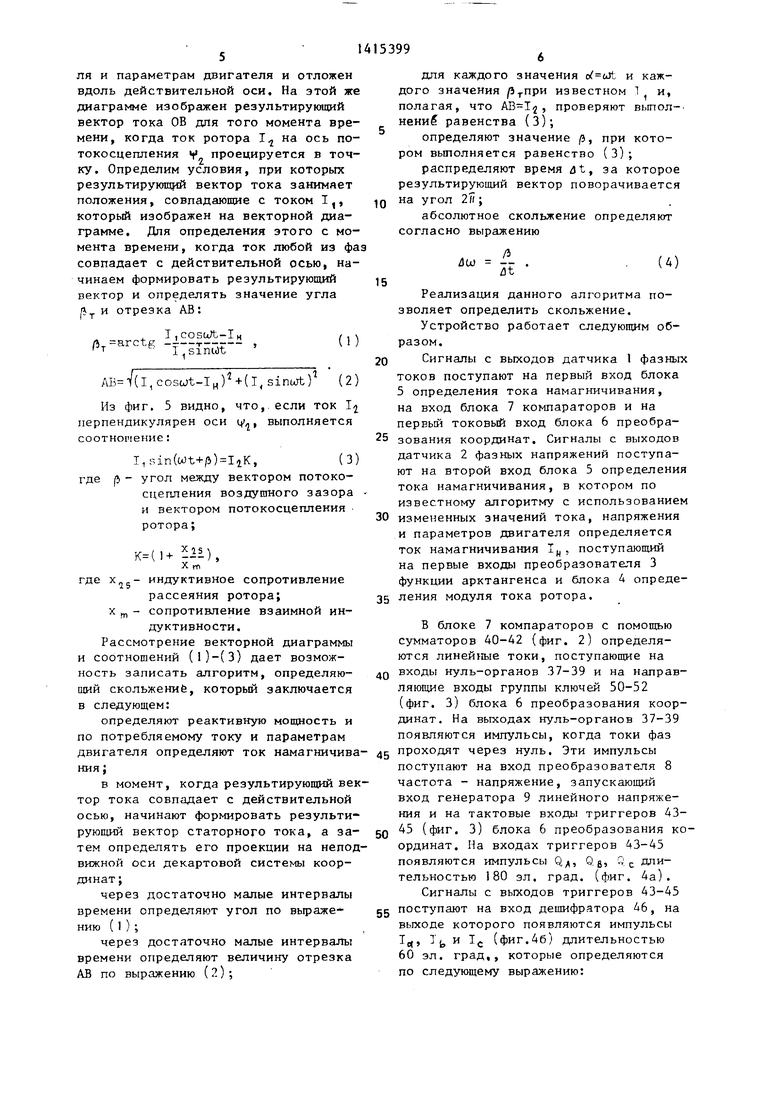
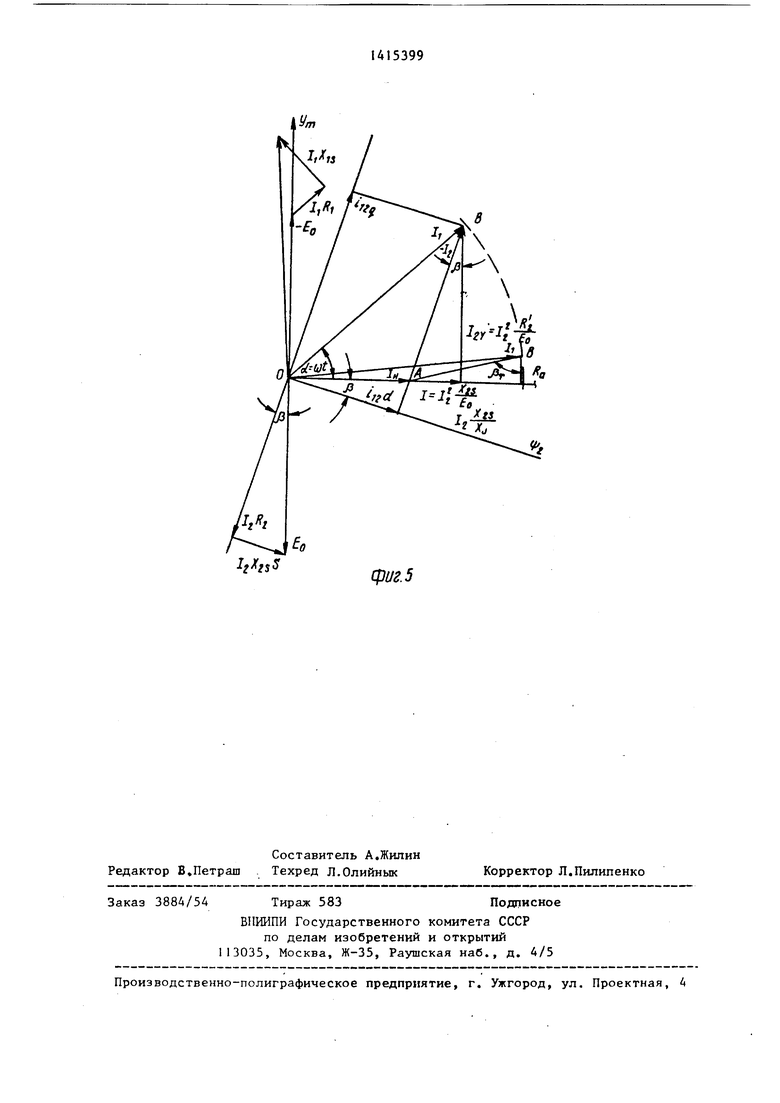
Для пояснения сущности работы устройства рассмотрим векторную диаграм- r-fy асинхронного двигателя (фиг. 5) Ток намагничивания 1 определен по измеренному напряжению току двигателя и параметрам двигателя и отложен вдоль действительной оси. На этой же диаграмме изображен результирующий вектор тока ОБ для того момента времени, когда ток ротора 1 на ось пов точу проецируется Определим условия, при которых
токосцепления ку
результирующ вектор тока занимает положения, совпадающие с током 1, который изображен на векторной диаграмме. Для определения этого с момента времени, когда ток любой из фа совпадает с действительной осью, начинаем формировать результирующий вектор и определять значение угла и отрезка АВ:
N
1,СОБ1Л-1ц
.arctg , (l,coscJt-In)+(l,sinu)t)
АВ
Из фиг. 5 видно, перпендикулярен оси соотношение:
(1) (2)
что, если ток 1 ц, выполняется
Tisin(wt+/i)IaK, (3 где р- угол между вектором потоко- сцепления воздушного зазора и вектором потокосцепления ротора;
К(1 Н),
X гп
где индуктивное сопротивление
рассеяния ротора; X - сопротивление взаимной индуктивности.
Рассмотрение векторной диаграммы и соотношений (1)-(3) дает возможность записать алгоритм, определяющий скольжение, который заключается в следующем:
определяют реактивную мощность и по потребляемому току и параметрам двигателя определяют ток намагничивания ;
в момент, когда результирующий вектор тока совпадает с действительной осью, начинают формировать результирующий вектор статорного тока, а затем определять его проекции на неподвижной оси декартовой системы координат ;
через достаточно малые интервалы времени определяют угол по выраже- - нию (1);
через достаточно малые интервалы времени определяют величину отрезка АВ по выражению (2);
для каждого значения и каждого значения известном Т и, полагая, что , проверяют выпол- нениб равенства (З);
определяют значение ft, при котором вьшолняется равенство (3);
распределяют время 4t, за которое результирующий вектор поворачивается на угол
абсолютное скольжение определяют согласно выражению
/)Сх) -/)t
(4)
Реализация данного алгоритма позволяет определить скольжение.
Устройство работает следующим образом.
Сигналы с выходов датчика 1 фазных токов поступают на первый вход блока 5 определения тока намагничивания, на вход блока 7 компараторов и на первый токовый вход блока 6 преобразования координат. Сигналы с выходов датчика 2 фазных напряжений поступают на второй вход блока 5 определения тока намагничивания, в котором по известному алгоритму с использованием измененных значений тока, напряжения и параметров двигателя определяется ток намагничивания Т. поступающий на первые входы преобразователя 3 функции арктангенса и блока 4 определения модуля тока ротора.
В блоке 7 компараторов с помощью сумматоров 40-42 (фиг. 2) определяются линейные токи, поступающие на входы нуль-органов 37-39 и на направляющие входы группы ключей 50-52 (фиг. 3) блока 6 преобразования координат. На выходах нуль-органов 37-39 появляются импульсы, когда токи фаз проходят через нуль. Эти импульсы поступают на вход преобразователя 8 частота - напряжение, запускающий вход генератора 9 линейного напряжения и на тактовые входы триггеров 43- 45 (фиг. 3) блока 6 преобразования координат. На входах триггеров 43-45 появляются импульсы Q, Q, 6, Q, j. длительностью 180 зл. град. (фиг. 4а).
Сигналы с выходов триггеров 43-45 поступают на вход дешифратора 46, на выходе которого появляются импульсы Ijj, Т и If. (фиг.4б) длительностью 60 эл. град,, которые определяются по следующему выражению:
Trt Q/iBeOc-Q/iQBQc, ., ic QflQBQc Q Qe-c.
В момент проявления импульса на выходе дешифратора Д6 ключи 47-52 открываются. Например, при-появлении импульса Гд, открываются ключи 47 и 50 и на выходе сумматора 53 появляется сигнал, пропорциональный фазному току фазы А, а н. выходе сумматора 54 - сигнал, пропорциональньй линейному току фаз В и С. Аналогично работает блок 6 преобразования координат при появлении импульсов
Ib и IcТаким образом, при наличии импульса 1(5,, I у, или If. блок 6 преобразования координат начинает по текущи токам фаз А, В и С формировать составляющие векторов TjCoriJt и I sinoot в ортогональной неподвижной системе координат. Сигналы с выходов сумматоров 53 и 54 поступают на входы преобразователя 3 функции арктангенса, блока 4 определения модуля тока ротора и блока 10 определения модуля тока статора. В блоке 3 по току намагничивания I,j и выходным сигналам сумматоров 53 и 54 определяется величина угла ft согласно вьфажению (1), а в блоке 4 по тем же входным параметрам определяется значение отрезка АВ по выражению (2).
Функциональные преобразователи 3 и 12 могут быть реализованы программно, методами кусочно-линейной аппроксимации (методами аналоговой техники) или с помощью дешифратора (методом дискретной техники).
Для вычисления текущих значений переменных необходимо иметь напряжение, пропорциональное углу поворота результирующего вектора тока. Это осуществляется с помощью преобразователя 8 частота - напряжение и генератора 9 линейного напряжения. На вход преобразователя 8 частота - напряжение с выхода нуль-органов 37-39 (фиг. 2) подается сигнал в виде последовательности импульсов. Напряжение с выхода преобразователя 8 частота - напряжение поступает на основной вход генератора 9 линейного напряжения,- который запускается управляющим выходным сигналом блока 7 компараторов, когда ток очередной фазы проходит через нуль. Сигнал с
выхода генератора 9 линейного напряжения и сигнал с выхода преобразователя 3 функции арктангенса суммируются в сумматоре 11, а затем поступают в функциональный преобразователь 12 синуса, в котором по заданному значению аргумента определяется функция sin(). Далее сигнал с выхода функционального преобразователя 12 синуса поступает в блок 13 умно- жения, на второй вход которого поступает сигнал с выхода блока 10 определения модуля тока статора. Таким
образом, на выходе блока 13 умножения появляется сигнал, пропорциональный левой части выражения (3), кото- рьй поступает на один из в;:одсз блока 14 сравнения. На второй вход этого блока поступает сигнал с блока 4 определения модуля тока ротора, предварительно умноженный в масштабном усилителе 15 на коэффициент . Таким образом, в блоке 14
сравнения осуществляется сравнение двух изменяющихся во времени функций: T,nin(wt + /i) и Т,К.
В момент вьшолнения равенства {3) на выходе блока 14 появляется импульс, которьй заносится в кольцевой счетчик 19, имеющий тесть информационных выходов. По приходу первого импульса с блока 14 сравнения на выходе кольцевого счетчика 19 появляется первый импульс, по которому запоминающий блок 20 читает информацию об угле /i с преобразователя 3 функций арктангенса. По приходу второго импульса с блока 14 сравнения кольцевой счетчик 19 выдает разрешающий импульс на запись информации с функционального преобразователя 3 в запоминающий блок 21. Таким образом,- в течение одного периода в запоминающие блоки 20-25 вносится информация о величине угла f. В следующие моменты времени процессы в кольцевом счетчике и запоминающих блоках повторяются. Спедует отметить, что импульс,
появившийся на выходе блока 14 сравнения, подается на стоковый вход генератора 9 линейного напряжения, по которому он обнуляется, что позволяет определять значение о сЛ шесть раз
за период.
Выполнение равенства (3) означает, что найден угол ft , определяющий положение оси Vj. Таким образом за один период шесть раз определяется числи
, величина которо- выходе запоминающих
тель вьфажения ( го фиксируется на блоков 20-25.
Интервалы времени /3t определяются генератором 32 стабильной частоты и счетчиками 33-35. При появлении сигнала 1д (фиг. 3) с.появляется разрешающий импульс, по которому счетчик 33 начинает заполняться импульсами от генератора 32 стабильной частоты. При появлении импульса 1 счетчик 33 прекращает счет импульсов, а счетчик
35начинает осуществлять счет импульсов от генератора 32, При появлении импульса 1 счетчик 35 прекращает
счет импульсов, а начинает заполняться импульсами счетчик ЗА. Таким образом, за один период каждьй из счетчиков два раза определяет значение времени /3t. В выражении (А) время dt определяет поворот результирующего вектора на угол 2f. На выходах счетчиков 33-35 появляется сигнал, пропорциональный углу поворота результи- рующего вектора только на 60 эл.град Дпя согласования масштаба выходные сигналы счетчиков 33-35 подаются на масштабные усилители 16-18, которые осуществляют умножение входного сигнала в шесть раз. В блоках 26-31 деления осуществляется операция деления согласно выражению (4 ), и на выходе каждого блока один раз за период определяется дискретное значение абсолютного скольжения/Jс). В блоке
36определения среднеарифметического значения скольжения выходные сигналы блоков 26-31 деления суммируются
и делятся на щесть, что позволяет определить среднее значение скольжения за период.
Следует отметить, что устройство дает информацию о величинах /J, t, 2. Это позволяет, изменяя только алгоритм функционирования блока 36, определять дополнительно частоту вращения ротора ыр и относительное скольжение S по следующим вьфажениям:
л+
2ti-K Ъ
и 21Т
(5) (6)
Таким образом, введенные в устрой- ство функциональные преобразователи, блок вычисления тока намагничивания, блок компараторов, блок преобразования координат, генератор стабильной
0
5
5
Q
частоты, счетчики, кольцевой счетчик, запоминающие блоки, блоки деления и блок определения среднеарифметического значения скольжения позволяют определять скольжение асинхронного двигателя на основе анализа электромагнитных процессов без применения тахогенератора и с более высокой точностью в сравнении с известным уст-, ройством.
Формула изобретения Устройство для определения скольжения асинхронного двигателя, содержащее датчики фазных токов и напряжений, отличающееся тем, что, с целью повыщения точности, введены преобразователь функции арктангенса с тремя входами, блок определения модуля тока ротора с тремя входами, блок определения тока намагничивания с двумя вxoдa ш, блок преобразования координаты с двумя токовыми и управляющими выходами, блок компараторов с токовым и управляющим выходами, преобразователь частота - напряжение, генератор линейного напряжения с основным запускающим и стоповым входами, блок определения модуля тока статора с двумя входами, сумматор, преобразователь функции синуса, блоки умножения, блок сравнения, с первого по четвертый g масщтабные усилители, кольцевой счетчик со счетным входом и щестью информационными выходами, шесть блоков запоминания, шесть блоков деления, генератор стабильной частоты, три счетчика, каждый из которых выполнен со счетным входом и двумя уп- равляюшлми входами, и блок определения среднеарифметического значения скольжения, при этом первый вход пре0
образователя функции арктангенса и первый вход блока определения модуля тока ротора соединены с выходом блока определения тока намагничивания, а первый токовый вход блока преобразования координат объединен с входом блока компараторов и с первым входом блока определения тока намагничивания и подключен к выходу блока датчиков фазных токов, управляющий выход блока компараторов соединен с входом преобразователя частота - напряжение, запускающим входом генератора линейного напряжения и с управляющим входом блока преобразования координат.
токовый выход блока компараторов соединен с вторым токовым входом блока преобразования координат, токовые выходы которого соединены соответственно с вторыми и третьими входами блока определения модуля тока ротора и преобразователя функции арктангенса и с соответствующими входами блока определения модуля тока статора, выход которого соединен с одним из входов блока умножения, выход которого соединен с первым входом блока сравнения, а выход преобразователя функции арктангенса соединен с одним из входов сумматора, выход которого через преобразователь функции синуса соединен с вторым входом блока умножения, второй вход блока сравнения через первый масштабный усилитель соединен с выходом блока определения модуля тока ротора, выход блока сравнения соединен со стоковым входом генератора линейного напряжения и со счетным входом кольцевого счетчика, выходы которого подключены к управляющим входам шести блоков запоминания, вторые входы которых объединены и подключены к выходу преобразователя функции арктангенса, выходы блоков запоминания подключены к первым входам соответствующих блоков деления.
/Г 12
иг. 2
вторые входы первого и четвертого блоков деления через второй масштабный усилитель соединены с выходом первого счетчика, вторые входы второго и пятого блоков деления через третий масштабньй усилитель соединены с выходом второго счетчика, вторые входы третьего и шестого блоков деления
через четвертый масштабный усилитель соединены с выходом третьего счегчи- ка, счетные входы указанных счетчиков подключены к выходу генератора стабильной частоты, управляющие выходы блока преобразования координат подключены к попарно объединенным управляющим входам соответствующих счетчиков, а выход преобразователя частота - напряжение соединен с основным входом
генератора линейного напряжения, выход которого соединен с вторым входом сумматора, второй вход блока определения тока намагничивания соединен с выходам датчиков фазных напряжений,
Викоды блоков деления и выходы второго, третьего и четвертого масштабных усилителей соединены с входами блока определения среднеарифметического значения скольжения, выход которого
образует выход устройства для определения скольжения асинхронного двигателя.
Отвлояа 1
Риг.
,,
фиг. 5
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения скольжения асинхронных электродвигателей | 1983 |
|
SU1140043A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
