.4
оо 4
1
Изобретение относится к устройствам контроля и регулирования процессов электролитического нанесения покрытий, в частности на агрегатах электролитического лужения жести, и является усовершенствованием устройства, описанного в авт. св. № 1341618.
Цель изобретения повышение качества регулирования.
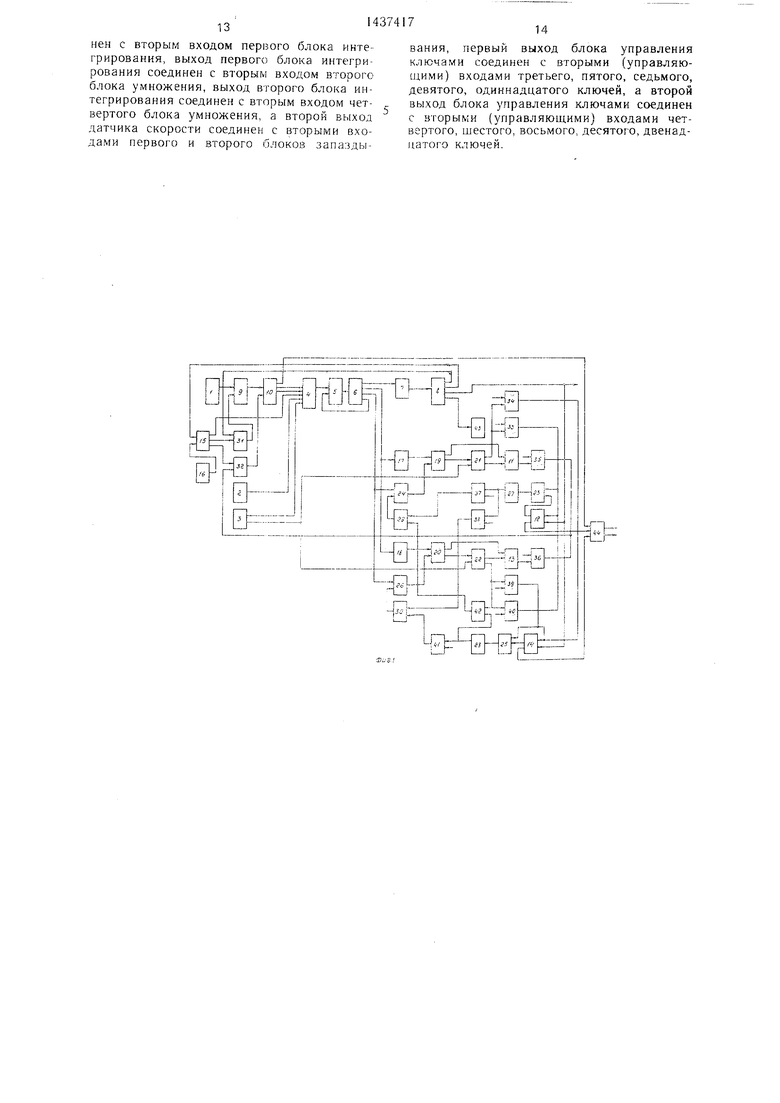
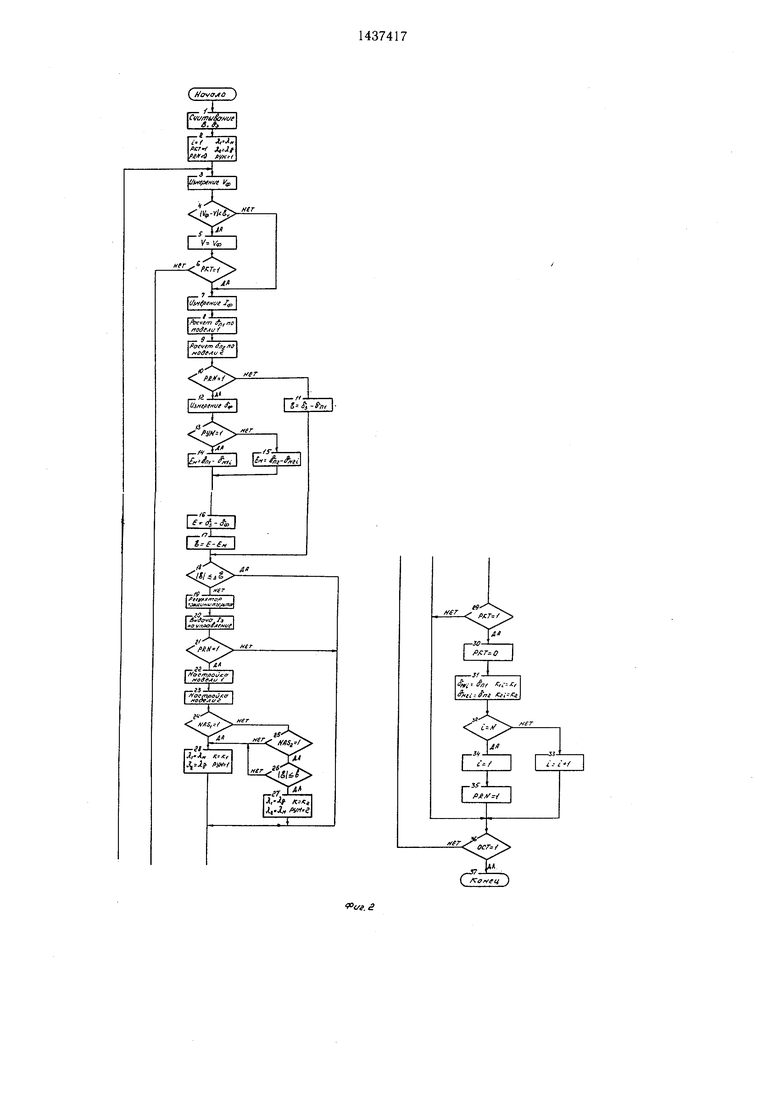
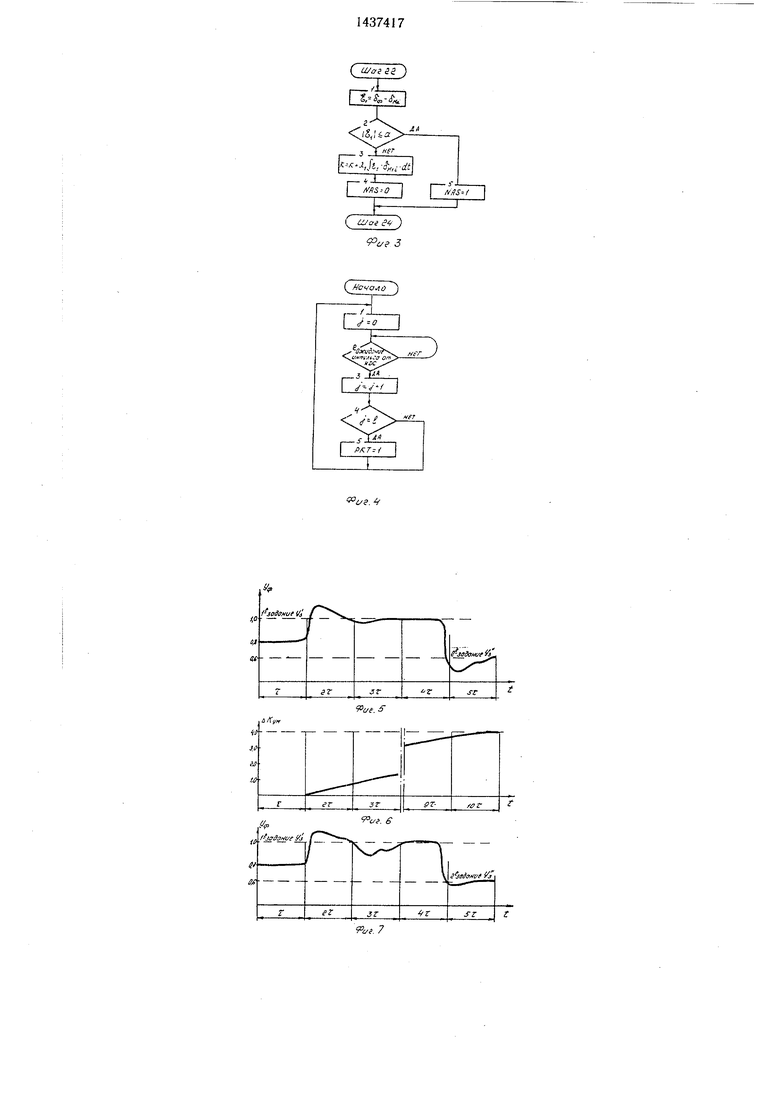
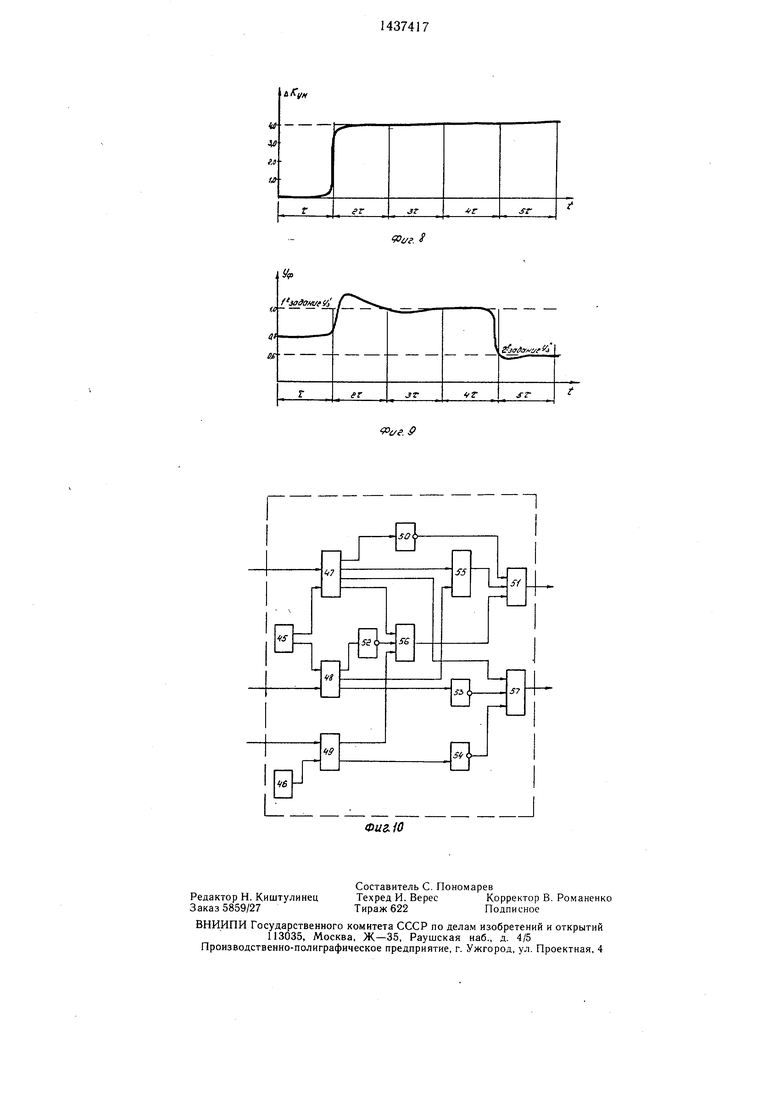
На фиг. 1 изображена блок-схема системы автоматического регулирования толщины покрытия жести; на фиг. 2 - блок- схема алгоритма автоматического регулирования толщины покрытия жести; на фиг. 3 -- блок-схема алгоритма настройки модели объекта; на фиг. 4 - блок-схема алгоритма модели, реализующей транспортное запаздывание объекта; на фиг. 5 -- переходный про- цесс в системе с контуром медленной (обычной) самонастройки модели; на фиг. б - процесс настройки коэффициента усиления K.V в контуре медленной самонастройки; на фиг. 7 - переходный процесс в системе с контуром быстрой самонастройки модели; на фиг. 8 - процесс настройки коэффициента усиления K.VV в контуре быстрой самонастройки; на фиг. 9 - переходный процесс в системе, блок-схема которой представлена на фиг. ; на фиг. 10 - блок-схема блока уп- равления ключами.
Система автоматического регулирования ТОЛЩИНЫ покрытия жести содержит задатчик I толпдины покрытия, задатчик 2 ширины полосы, датчик 3 скорости полосы, регулятор
4 толщины покрытия, регулятор 5 тока лужения, силовой преобразователь б, объект 7 регу;1ирования, датчик 8 толщины покрытия, су.м.маторы 9-14, компаратор 15, блок 16 задания константы, .модели 17 и 18 объекта, модели 19 и 20 датчиков толщины покрытия, блоки 21 и 22 запаздывания, блоки 23-26 умножения, блоки 27 и 28 коэффициентов, блоки 29 и 30 интегрирования, ключи 31--42, индикатор 43 и блок 44 управления ключами, причем выход задатчика 1 толщины покрытия соединен с первым входом сумматора 9, второй вход которого соединен с выходом ключа 31, выход сумматора
9соединен с первым входом сул1г атора 10, второй вход которого соединен с выходом ключа 32, первый и второй выходы сумматора
10соединены соответственно с третьим и четвертым входа.ми регулятора 4 толпдины покрытия, пятый вход которого соединен с первым выходом компаратора 15, второй и третий выходы компаратора 15 соединены с управляю цдими входами ключей 31 и 32, первый вход компаратора 15 соединен с выхо- до.м блока 16 задания константы, третий выход силового преобразователя 6 соединен с входами моделей 17 и 18 объекта, выходы которых соед.инены с первыми входами моделей датчиков 19 и 20 толщины покрытия, а вторые входы последних - с выходам.ч блоков 24 и 26 умножения, первые входы которых соединены с четвертым выходом сило
0
0
5 5
г
0
5
0
5
0
вого преобразователя 6, первые выходы моделей 19 и 20 датчиков толщины покрытия соединены с первыми входами блоков 21 и 22 запаздывания, вторые выходы моделей датчиков 19 и 20 толщины покрытия соединены соответственно с вторыми входами сумматоров 11 и 13, а первые входы последних соединены с первыми выходами блоков 21 и
22запаздывания, причем второй выход блока 21 запаздывания соединен с первыми (информационными) входами ключей 33 и 34, а второй выход блока 22 запаздывания соединен с первыми (информационными) входами ключей 39 и 40, выход сумматора 11 соединен с первым (информационным) входом ключа 35, а выход сумматора 13 соединен с первым (информационным) входом ключа 36, выходы ключей 33 и 40 соединены с первыми входами сумматора 12 и блока 23 умножения, а выходы ключей 34 и 39 соединены с первыми входами сумматора 14 и блока 25 умножения, вторые входы сумматоров 12 и 14 соединены с третьим выходом датчика 8 толщины покрытия, 1ервый выход которого соединен с вторым входом компаратора 15, второй выход датчика 8 толщины покрытия соединен с информационным входом ключа 3, а четвертый выход того же датчика 8 соединен с индикатором 43, первые сумматора 12 и 14 соединены с вторыми входами соответственно блоков
23и 25 умножения, вторые входы сумматора 12 и 14 соединены соответственно с первым и вторым входами блока 14 управления ключами, а третий вход последнего соединен с третьим выходом сумматора 10, выходы блоков 23 и 25 умножения соединены соответственно с входами блоков 27 и 28 коэффициентов, выход блока 27 коэффициентов соединен с информационными входами ключей 37 и 38, выход блока 28 коэффициентов соединен с первыми (информационными) входами ключей 41 и 42, выходы ключей 35 и 36 соединены с информационным входом ключа 32, выход ключа 37 соединен с первым входом блока 29 интегрирования, выход ключа 38 соединен с первым входом блока 30 интегрирования, выход ключа 4 соединен с вторым входом блока 30 интегрирования, выход ключа 42 соединен с вторым входом блока 29 интегрирования, выход блока 29 интегрирования соединен с вторым входом блока 24 умножения, выход блока 30 интегрирования соединен с вторым входом блока 26 умножения, а второй выход датчика 3 скорости соединен с вто- )ыми входами блоков 21 и 22 запаздывания, первый выход блока 44 управления ключами соединен с вторыми (управляющими) входами 33, 35, 37, 39 и 41 ключей, а второй выход блока 44 управления ключами соединен с вторыми (управляющими) входами ключей 34, 36, 38, 40 и 42.
Пример реализации блока 44 управления ключами приведен на фиг. 10. Блок 44 управления содержит блок 45 задания константы а, блок 46 задания константы в, компараторы 47-49, схемы 50-54 ИЛИ, схемы 55-57 И, причем первый выход блока 46 задания константы -соединен с вторым входом компаратора 47, первым входом которого является первый вход блока 44 управления ключами, первый выход компаратора соединен с входом схемы 50 ИЛИ, выход которой соединен с первым входом схемы 51 ИЛИ, вторым входом которой является выход схемы 55 И, а четвертый выход компаратора 47 соединен с первым входом схемы 56 И, вторым входом которой является выход схемы 52 ИЛИ, вход последней соединен с первым выходом компаратора 48, первым входом которого является второй выход блока 45 задания константы а, вторым входом схемы 55 И является второй компаратора
48, вторым ЗХОДОл которого ЯВ., ;ЯетСЯ ВХО 1
блока 44 управлеки5; ;с. 1;очами- третий (;д компаратора 48 соелн :еи с входом 53 ИЛИ, выход которой сое/ЁИнеи с вторым входом схемы 57 И. выход ко: опсм является сторым выходом блока 44 управления ключами, третьим входом схемы 57 И является выход схемы 54 ИЛИ, вход которой соединен с вторым выходом компаратора 49, первым входом которого является третий вход блока 44 управления ключами, а вторым входом - пы- ход блока 46 задании константы в, первый выход компаратора 49 соединен с третьим входом схемы 56 И, выход которой соединен с третьим входом схемы 51 ИЛИ, выход которого является первым входом б. юка 44 управления ключами.
Система автоматического регулирования толщины покрытия жести работает следующим образом,
С выхода задатчика 1 толщины покрытия сигнал, пропорциональный заданной толщине покрытия жести, поступает ,ча первый вход сумматора 9, где сравнивается с сигналом, пропорциональным фактической толщине покрытия, поступающим с второго выхода датчика 8 толщ.ины покрытия через ключ 31 на второй вход сумматора 9.
Ключи 31 и 32 открываются и закрываются сигналами с выходов компаратора 15, поступающими на управляющие входы этих ключей.
Компаратор 15 предназначен для переключения каналов регулирования, например, после заправки полосы в агрегат, когда лужение полосы в ваннах уже производится, а под датчиком 8 толщины покрыт11я еще находится нелуженная полоса - регулирование осуществляется разомкнутой системой, а после появления луженой полосы под датчиком 8 толщины покрытия - регулирование осуществляется замкнутой системой,
С выхода сумматора 9 на первый вход сумматора 10 поступает сигнал, который сравнивается с выходным сигналом сумматора 1,
10
15
4
проходящим через ключи 35 и 32 на второй вход сумматора 10,
С первого и второго выходов сумматора 10 сигналы поступают на третий и четвертый входы регулятора 4 толщины покрытия жести,
С задатчика 2 щирины полосы сигнал, пропорциональный ширине полосы, поступает на первый вход регулятора 4 толщины покрытия жести, на второй выход которого поступает с ,да датчика 3 скорости полосы сигнал, пропорциональный скорости полосы,
С выхода регулятора 4 толщины покрытия жести сигнал поступает на первый вход ре- 5 тока лужения,
луженая полоса отсутствует под толщины покрытия на выходе ре- TO iuu:; bi покрытия фо|)л1И 1уе гся
гулятора
Когда
датчиком
Г ЛЯТСП;: СИГНсЛ
vB-V, ток задания;
коэффициент пропорциональности; Б - lunpHHa полосы; V -- скорость полосы; 6з - заданная толщина покрытия; Когда луженая полоса находится под датчиком толщр НЫ покрытия, регулятор 4 то,:1Плииь покрытия преобразуется в 11г1Д- регулятор с передаточной функцией
1,V где 1, - К 0
5
0
5
0
5
- . 1 Ki
и ) 6--rtV, Vi+n6,
к. Кз
-K,iP,
пропорцио- интегрально- дифферепциs(P) где Ki K-B-V - коэффициент
нального звепа; коэффициент го звена; - коэффициент
ального звена.
Передаточная функция регулятора 4 толщины покрытия определяется из условия модульного оптимума систем подчинепного регулирования,
С выхода регулятора 5 тока лужения сигнал поступает на вход силового преобразователя 6, выходной сигнал которого поступает на вход объекта 7 регулирования, модели 17 и 18 объекта регулирования, первые входы блоков 24 и 26 у,множения. и в качестве сигнала обратной связи - на второй вход регулятора 5 тока лужения. Главная функция силового преобразователя 6 - создание тока лужения в электролите ванн между электродами (оловянными) и полосой, на которую нанос ится покрытие. Датчик 8 толщины покрытия измеряет (за ваннами лужения) толщину нанесенного на полосу покрытия. Сигнал с выхода датчика 8 толщины покрытия, пропорциональный толп1,и- не покрытия полосы, поступает на вторые входы сумматоров 12 и 14, на вход индикатора 43, второй вход компаратора 15 и информационный вход первого ключа 31, С выхода модели 17 объекта регулирования сигнал, пропорциональный модельному значению толщины покрытия, поступает на первый вход модели 19 датчика толщины покрытия, а с выходов последней сигналы поступают на первый вход блока 21 запаздывания и второй вход сумматора -11. С первого выхода блока 21 запаздывания сигнал, пропорциональный модельной толщине покрытия, с запаздыванием т поступает на первый вход сумматора 11, а с второго выхода - на информационные входы ключей 33 и 34.
С выхода модели 18 объекта сигнал поступает на первый вход модели 20 датчика толщины покрытия, а с выходов последнего сигналы поступают на первый вход блока 22 запаздывания и второй вход сумматора 13. С первого выхода блока 22 запаздывания сигнал, пропорциональный модельной толщине покрытия, с запаздыванием т поступает на первый вход сумматора 13, а с (г-о- рого выхода блока 22 запаздывания си1Ч1ал поступает на информационные входы ключей 39 и 40. Сигналы с выходов ключей 34 ;- 39 поступают на первый вход сумматора 14 и первый вход блока 25 умножения.
Сигналы с выходов ключей 33 и 40 гио- ступают на первый вход сумматора 12 и п,ер- вый вход блока 33 умножения. Сигналы с выходов сумматоров 1 и 13 поступают на ин- фор.мационные входы соответственно ключей 35 и 36, а сигналы с выхода последних но- на информационный вход ключа 32, с выхода которого (при наличии сигнала на управляющем входе) сигнал поступает на агорой вход сумматора 10. С первых выходов сумматоров 12 и 14 сигналы поступают па вторые входы соответственно блоков 23 и 25 умножения. С выхода блоха 33 умножения сигнал поступает на вход блока 27 коэффициентов, а с выхода последнего сигнал поступает на информационные входы ключей 37 и 38, причем выходной сигнал с ключа 37 подается на первый вход блока 29 интегрирования, а выходной сигнал ключа 38 подается на первый вход б.. ока 30 интегрирования. Аналогично, сигнал с зыхо.ча блока 25 умножения поступает на вход блока 28 коэффициентов, выходкой сигнал которого подается на информационные входы ключей 41 и 42, причем выходной сигнал ключа 41 подается на второй вход блока 30 интегрирования, а выходной клнэча 42 - на второй вход блока 29 интегрирования, вьгходной сигнал которого подается на второй вход блока 24 умножения, а выходной сигнал последнего - на второй вход модели 19 датчика толщины покрытия, {выходной сигнал блока 30 интегрирования поступает на второй вход блока 26 умножения, с выхода которого сигнал поступает на второй вход модели 20 датчика толщины покрытия. С второго выхода датчика 3 скорости полосы сигнал поступает па вторые входы блоков 21 и 22 запаздывания.
Выходные сигналы с третьего выхода сумматора 10, с второго выхода суммато
0
0
5
0
5
0
5
ра 12 и с второго выхода сумматора 14 поступают на три входа блока 44 управления ключами, причем сигнал с первого выхода поступает на управляющие входы к тючей 33, 35, 37, 39 и 41, а сигнал с второго выхода поступает на управляющие входы кличей 34, 36, 38, 40 и 42.
Условия использования моделей объекта и датчика в контурах быстрой и медленной самонастройки объясняются следующим образом.
Первое условие: - означает, что первая модель, находящаяся в контуре медлен ной самонастройки, не настроена, вторая модель, находящаяся в контуре быстрой самонастройки, также не настроена и поэтому нет причин (условий) для переключения моделей, хотя г;ри возможна замена м;;делей в основном контуре рег улирования;
второе условие: , t -2: s, е b --- означает, что модель. находяи.,аяся в контуре медленной самозастройки, настроена и независимо от велнчи;-п RV и к кз 1енение состояния (например, переключение мо.арлей) не- :1елесообразно, так кэк регулирование осу- н ествляют но настроенной модел ;
третье условие: , , -- означает, что модель в контуре быстрой самонастройки настроена (). ошибка контура регулир01-;ан - я меньше заданной () я HacTpoeiiHVK; модель можно включить в основной контур :;егулирования вместо нена- строе};ной () без внесе ия возмущения к основной контур регулирования:
четвертое условие: , , - означает, что хотя г юдель в контуре быстрой самонастройки настроена (), а модель в основном контуре регулирования (в контуре медле1шой самонастройки) не настроена, переключение нецелесообразно, так как при .возмущение от переключения .1оде; ей иызовет iiepepei -улирование рег} лируемoi-o па)аметра, 1 де К, t 2 -- рассогласования между заданной и модельной значенпя.ми тол- ;nHHbi гюкрытия соответственно для 1ервой- и второй моделей объекта: е О нибка регулирования;
а, Ь -- заданные пределы ошибок.
В начале работы системы, когда модели не настроены (, , ), формируется управ;1яющий сигнал на первом выходе б.юка 44 управления ключами и открыты ключи 33, 35, 37, 39 и 41.
В этом случае сигнал с объекта 7 и сиг- .нал с модели 17 объекта через ключ 33 поступают на входы блока 23 умножения и блока 27 коэ(|:)фициента.
р астройка модели объекта описана в основном изобретении. Блок 27 коэффициентов реализует коэффициент контура медленной самонастройки. Выходной сигнал блока 27 коэффициентов через открытый ключ
37 поступает на первый вход блока 29 ип тегрирования и далее выходной сигнал с этого блока переумножается с сигналом с выхода силового преобразователя 6. С выхода блока 24 умножения сигнал коррекции поступает на второй вход модели 19 датчи- ка толщины. В процессе работы системы модель 17 объекта настраивается и ее выходные сигналы через открытый ключ 35 используются в основном контуре регулирования. Параметры блока 27 коэффициентов выбра- ны так, чтобы в основном контуре регулирования системы переходный процесс проходил без перерегулирования (или с заданным перерегулированием). Однако при этих условиях настройка модели 17 объекта происходит медленно. В это же время сигналы с выхода датчика 8 толщины покрытия и блока 22 запаздывания преробразуются сумматором 14, блоком 25 умножения и блоком 28 коэффициентов (реализует коэффицнен- - контура быстрой самонастройки) и по- ступают на вход блока 30 интегоиро -;аиия, выходной сигна,; которого совместно с ходным сигналом силового преобразователя 6 поступает на входы блока 26 умножения, а с выхода последнего корректипх ю- щий сигнал поступает на вход модели 20 датчика толц|,инь покрытия. Этот сигнал поступает на второй вход модели 20 датчика толщины покрытия и корректирует 3bixo;iiioi: сигнал модели 18 объекта.
Модель 18 объекта настраивается в процессе работы системы, но значительно быстрее первой за счет соответствующего выбора параметров блока 28 коэффициентов. Выходной сигнал модели 18 объекта и модели 20 датчика толщины не используется з основном контуре регулирования cncTe vibi, так как ключ 36 закрыт и темп настройки модели не вносит возмуп1,ения в систему.
Если выполняется условие: , , (т. е. вторая модель настроена, первая - нет и ощибка регулирования равна статической или стремится к нулю), в блоке 44 управления ключами на втором выходе формируется управляющий сигнал и поэтому ключи с четными номерами (начиная с четвертого) открываются, а с нечетными (начиная с третьего) закрываются.
В этом случае выходные сигналы модели 18 объекта и модели 20 датчика толщины покрытия (без запаздывания и с запаздыванием) через открытый ключ 36 подключаются череа открытый ключ 32 к второму входу сумматора 10, т. е. в основном контуре регулирования используется настроенная модель 18 объекта. Модель 7 объекта и модель 19 датчика толщины покрытия (вместе с блоком 21 запаздывания) с помощью ключей включаются в контур быстрой самонастройки (сумматор 14, блок 25 умножения и блок 28 коэффициентов)-, где продолжается настройка модели 17 объекта. Таким образом, модель 17 оказа
5
0 0
0
5
0
5
5
0
/lach н быстрой самонастройки и продолжает настраиваться, а регулирование в системе ведется по настроенной модели 18 объекта.
В случае изменения условий может произойти обратное переключение моделей.
Проведенное моделирование для конкретной системы с ПИД-регулятором показало, что при ,2 (см. фиг. 5) перерегулирование в интервале незначительно (находится в 5%-ной зоне), однако па- стройка коэффициента продолжается п течение Ют (см. фиг. 6). Причем если последующее возмущение произошло в интервале до 7-8т, то первый после приложения возмущения выброс регулируемого параметра значителен, так как модель еще не настроилась.
KoKTvp изстройки модели с .2 0.3 в дальнеЙ 1ем называем модленныл ,.
МоделнрОБЛпмс -оП же сисгем -, : ll;i,4- регулятором, но с /.----0,9 показало (см. фиг. 7), что перерегулирование н иптсм;и;1- ле сущестпеино, но o;l.e.1ь Нлстра: - вается з течение 2т (CN;, фиг. 8). Нсли п;;с.it настройки моде. 1 произошло п(, (например, задания, к,:;к н; (-и 7) i o переход15ый прсцесс зака Ч:1п;к тс : интервале од;;ого т без существе1;|;ог() перс- регулирования.
Таким образог :, быстрая настрш п;: де. выгодна для . ;едую1цей рапоть (после t 37, но вызывает cx iiio- стзенное перерегулlipoeaHne регулnp) ovo;-o параметра (при ), пр;; медленной п:г стройке моде. и; качество переходного процесса в начальном нерподе () лучше, чем в этом же периоде предыду1Г1е1Ч) c. iy- чая, но хуже в дальнейшем при riOBTOp- ных возмущениях в интервале до Ют.
В это же время, т. е. когда настраина- ется модель в контуре медленной самонастройки, ведется настройка второй модели в контуре быстрой самонастройки, без выдачи сигналов с модели в OCHOBHOI; регу,1ирования.
Таким o6pa3ONi, использование модели объекта с медленной самонастройкой в основном контуре регулирования не вызывает перерегулирования. После настройки второй модели в контуре быстрой самонастройки эту модель переключают на место первой (в основной контур регулирования), я первую переключают в контур быст|юй самонастройки и продолжают ее настройку, нри- чем эти онерацип производят при вьпк), 1нс- нии следующих условий:
, О, ir Sib - исходное состояние, когда в основной контур регу. шро- вания включают нервую модель и i-:acTpaii- вают в контуре медленной самонр.стрги к -;:
, . -- сохраняют i;N:o; );iU4 - ся состояние, нереключепиГ ист:
, . осупкч-;- лч ,.- реключение моделей:
9
2
РКТ PRN
, , - сохраняют имеюееся состояние, переключений нет.
Моделирование показало, что при выполении указанных условий уже через 3т сисема работает с настроенной моделью и при зменении, например, задания переходный - роцесс заканчивается за время, меньшее дного т (фиг. 9). В системе без второй модеи и контура быстрой само|:астройки рабоа с настроенной моделью начинается чеез Ют. 10
На фиг. 2 представлена блок-схема алоритма автоматического регу.лирования тол- инЕ) покрытия жбсти. Ни);(е дано описаие алгоритма.
Описание ведется по гиага.м:
1 --считывания пжрины полосы В и заданного значения толп;яны покрытия жести i : установка начальных усло :и;й: номер контроли-|уемой точки: - признак приходя контрольной -jg точки;
-признак пахожде 1ия первой и после.дуюп1ей контрольных точек 10д толпдиномером; коэффициеь т усиления nepBOi o блока интегрировяния (считаем, что первая модель работает по контуру .медленной настройки);
-коэффициент усиления второ Ч) блока интегрирО153ния модель работает по быстрой настройк ,);
Py.V -- признак управляюгпей моде. :и. В начальный момент у:1рав;-яет первая модель;
измерение cKOpocTii движеп1-:я полосы Уф и ана,1из измерения , скорости по сравнению) с нреды- душ,им измерением, если Vj , то необходим пересчет тока, а иначе переход на шаг 7; проверка прихода контрольной точки, если РКТ-, го inar 7, ина- 40 че пгаг 36;
--- измерения тока 1ф;
--- расчет по первой модели проп-ю- зируюпдего значения толгцины покрытия &:i;
9-- расчет но второй модели прогнозируемого значения толгципь покрытия бл2;
проверка нахо/ждения полось под .-repoм. если , то шаг 12, иняче первая контролируемая точка еще не достигла толщиномера, шаг II; вычисление отклонения нрогно- зируемой толщины покрь тия от заданной, переход на ujar 18., измерения толщины покрытия б,.,; 55 13-проверка признака управляющей .модели, если РУМ, то управление осуществляется пер3,4.5
6
10 i 2 -
30
4.5
.50
- 10
-jg
16
19
20
10
вой ыо.-гечыо (шаг 14), иначе переход на uiar 15; определение рассогласования Ел между прогнозируемым и модельным значениями толщины покрытия соответственно первой или второй моделей;
определение рассогласования Ем .Ч:ежду заданным и фактическим зкачекиямк толщины покрытия; определение рассогласования между ЕЙ и t;
анализ рассогласования, если абсолютное значение Е в допустимых пределах, то шаг 29, иначе Hiar 19;
регулятор толщины покрытия от- рабг1ть пает рассогласование е; вь:д;::ча ппйв,пи О цего сигнала L ;
-нриверк:; РкХ:, если Да, то шаг :2 иначе inar 29; c/:o;-KHijm п;аг (см. фкг. 2) про- чзводн ся HucrpO:-hi;.: козффи- К по первой ;одели с коэффи1;м-:;н:том уснлеикя . . . ;eii ic oaccoi jiacoBBii K e :, С. cb.KVH cKiiM и модельным 3Jiat:i-KHH.vH-; голшины покрытия I анзлГ З .в д()1Г - стимые гра.чицы,
. , то г . }. i}; в ч с
0
5
0
.5
0
3
4 о 23
24,25 26, 27 -28 29
30
;1ЫЧг- С. 1гние коэффициент моде- ,;|И K K-rU|{;i&-;,di; обнуление признаки настройки , переход Jia juar 6; модель настроена. поэтому NAS.1;
сложн.ый шаг, аналогичен шагу 22, .производится настройка коэффициента Кг по в- орой модели с коэффициентом усиления .2;
проверка признак настройки первой .модели, если первая модель те настроена, то проверяется признак настройки второй модели, в случае если и вторая .модель не настроена, то выполняется inar 26., иначе п аг 28; если вторая модель настроена и фактическая толщина равна заданной, вторая ci ano- витсй упраалй още.й (РУМ-2) И работает по контуру медлен}К)й настройки (/.); первая . подель донастраивзет- ск :го быстрому контуру (Я| k,}, переход на шаг 29; управление по п-греой г годели
уд. .; л. провер а признака контрольной точки, если , то шаг 30, иначе шаг 36; обнуление РКГ;
31-запоминание прогнозируемой
толщины покрытия и коэффициентов моделей;
32- проверка, прошло ли L, если
«Да, то шаг 34, иначе шаг 33;
33- была контрольная точка, т. е.
прошло А1, увеличивается число контрольных точек . Переход на шаг 36;
34- начинается новый отсчет L, поэтому
35- первая и последующие контрольные точки находятся под толщиномером ();
36, 37 - анализ на завершение, если , то завершение работы, иначе управление продолжается (шаг 3).
На фиг. 4 приведен алгоритм блока запаздывания. Описяние ведется по iLiaraNi:
1- обнуление счетчика импульсов;
2- ожидание импульса От импульсного датчика скорости, по приходу импульса переход на шаг 3;
3- наращивание счетчика;
4- сравнение показаний счетчика с заданным числом импульсов, соответствующем длине между контрольными точками;
5- установка признака контрольной точки переход на шаг 1.
Технико-экономическое преимущество предлагаемой системы автоматического регу
лирования заключается в повышении каче- о кия, вторые входы четвертого и шестого сумства регулирования и как следствие качества выпускаемой продукции, уменьшается брак и сокращается расход олова.
Формула изобретения
Система автоматического регулирования толщины покрытия жести по авт. св. № 1341618, отличающаяся тем, что, с целью повыщения качества регулирования, она снабжена десятью ключами, двумя блоками
маторов соединены с третьим выходом датчика толщины покрытия, первый выход которого соединен с вторым входом компаратора, второй выход датчика толщины покрытия соединен с информационным входом 35 первого ключа, а четвертый выход того же датчика соединен с индикатором, первые выходы четвертого и шестого сумматоров соединены с вторыми входами соответственно первого и третьего блоков умножения, вторые выходы четвертого и шестого сумкоэффициентов, двумя сумматорами, вто- 40 маторов соединены соответственно с
рой моделью объекта, второй моделью датчика толщины покрытия, вторым блоком запаздывания, двумя блоками умножения, вторым блоком интегрирования и блоком управления ключами, причем выход задат- чика толщины покрытия соединен с первым входом первого сумматора, второй вход которого соединен с выходом первого ключа, выход первого сумматора соединен с первым входом второго сумматора, второй вход
и вторым входами блока управления ключами, а третий вход последнего соединен с третьим выходом второго сумматора, выходы первого и третьего блоков умножения сое- дг динены соответственно с входами первого и второго блоков коэффициентов, выход первого блока коэффициентов соединен с информационными входами седьмого и восьмого ключей, выход второго блока коэффициентов соединен с первыми (информационкоторого с оединен с выходом второго клю- ными) входами одиннадцатого и двенадцача, первый и второй выходы второго сумматора соединены соответственно с третьим и четвертым входами регулятора толщины покрытия, пятый вход которого соединен с первым выходом компаратора, второй и третого ключей, выходы пятого и шестого ключей соединены с информационным входом второго ключа, выход седьмого ключа соединен с первым входом первого блока интегрирования, выход восьмого ключа соединен
тий выходы компаратора соединены с уп,-55 с первым входом второго блока интегрироваравляющим.и входами первого и второгония, выход одиннадцатого ключа соединен
ключей, первый вход компаратора соединенс вторым входом второго блока интегрис выходом блока задания константы, тре-рования, выход двенадцатого ключа соеди
0
0
5
тий выход силового преобразователя соединен с входами моделей объекта, выходы которых соединены с первыми входами моделей датчиков толщины покрытия, а вторые входы последних - с выходами второго и четвертого блоков умножения, первые входы этих блоков умножения соединены с четвертым выходом силового преобразователя, первые выходы моделей датчиков толщины покрытия соединены с первыми входами первого и второго блоков запаздывания, вторые выходы моделей датчиков толщины покрытия соединены соответственно с вторыми входами третьего и пятого сумматоров, а первые входы последних соединены с пер- вы.ми выходами первого и второго блоков запаздывания, причем второй выход первого блока запаздывания соединен с первыми (информационными) входами третьего и четвертого С почеч. а второй выход второго блока запаздывания соединен с первыми (информационными) входами девятого и десятого ключей, выход третьего сумматора соединен с первым (информационным) входом пятого ключа, а выход пятого сумматора соединен с первым (информационным) входом LUcCToro ключз, выходы третьего и десягосо ключей соединены с первыми входами ствертого сумматора и первого блока умножения, а выходы четвертого и девятого соединены с первыми входами шестого сумматора is третьего блока умножематоров соединены с третьим выходом датчика толщины покрытия, первый выход которого соединен с вторым входом компаратора, второй выход датчика толщины покрытия соединен с информационным входом первого ключа, а четвертый выход того же датчика соединен с индикатором, первые выходы четвертого и шестого сумматоров соединены с вторыми входами соответственно первого и третьего блоков умножения, вторые выходы четвертого и шестого сумматоров соединены соответственно с
и вторым входами блока управления ключами, а третий вход последнего соединен с третьим выходом второго сумматора, выходы первого и третьего блоков умножения сое- г динены соответственно с входами первого и второго блоков коэффициентов, выход первого блока коэффициентов соединен с информационными входами седьмого и восьмого ключей, выход второго блока коэффициентов соединен с первыми (информационтого ключей, выходы пятого и шестого ключей соединены с информационным входом второго ключа, выход седьмого ключа соединен с первым входом первого блока интегрирования, выход восьмого ключа соединен
с первым входом второго блока интегрированем с вторым входом первого блока интегрирования, выход первого блока интегрирования соединен с вторым входом второго блока умножения, выход второго блока интегрирования соединен с вторым входом четвертого блока умножения, а второй выход датчика скорости соединен с вторыми входами первого и второго блоков запаздывания, первый выход блока управления ключами соединен с вторыми (управляющими) входами третьего, пятого, седьмого, девятого, одиннадцатого ключей, а второй выход блока управления ключами соединен с вторыми (управляющими) входами четвертого, шестого, восьмого, десятого, двенадцатого ключей.



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования толщины покрытия жести | 1985 |
|
SU1341618A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
Изобретение относится к устройства.м контроля и регулирования процессов электролитического нанесения покрытии, в частности на агрегата.х электролитического лужения жести. Цель изобретения - повышение качества регулирования. Система содержит задатчик толщины покрытия, задатчик ширины полосы, датчик скорости полосы, регулятор толщины покрытия, регулятор тока лужения, силовой преобразовате.ль, объект регулирования, датчик толщины покрытия, сумматоры, компаратор, блок задания константы, модели объекта, модели датчиков толщины покрытия, блоки запаздь ван1 Я, блоки умножения, блоки коэффициентов, блоки интегрирования, ключи, индикатор и блок управления ключами. Повышение качества регулирования достигается введением второй модели объекта, второй модели датчика толщины покрытия. 10 ил. S
f joSONl/fS/i
| Система автоматического регулирования толщины покрытия жести | 1985 |
|
SU1341618A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
