4
САЭ 00 О5
00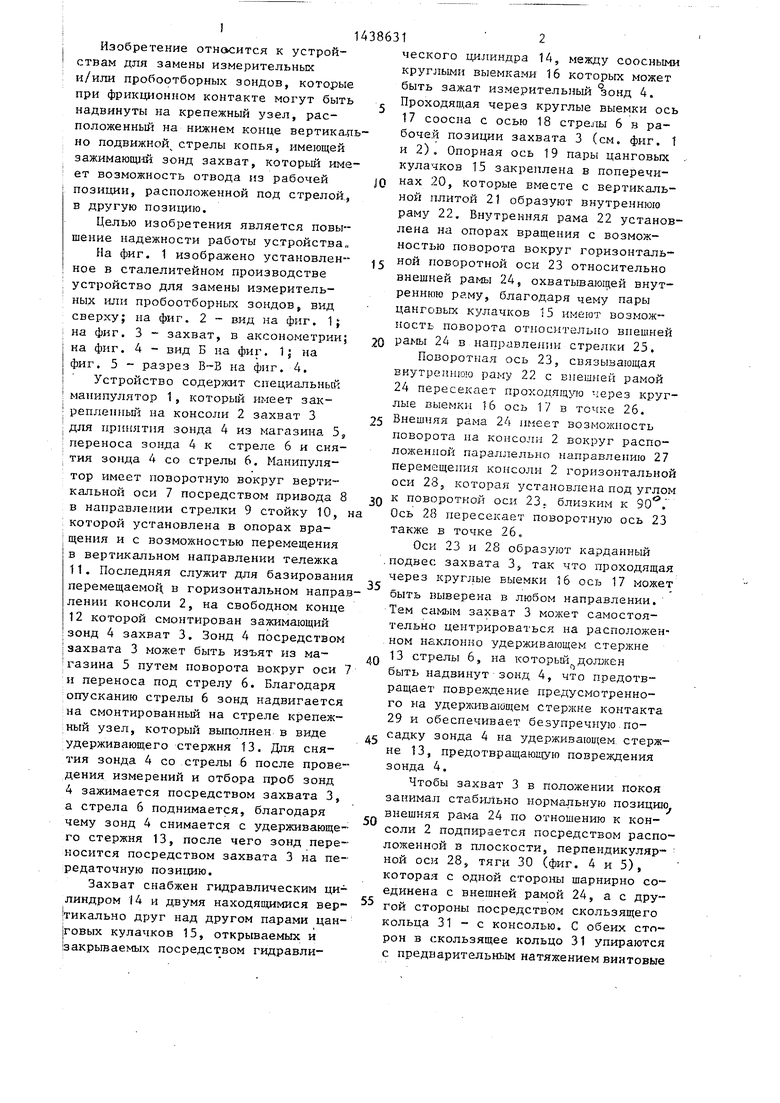
Изобретение относится к устройствам для замены измеритель ных или пробоотборных.зондов. Целью изобретения является повышение надежности работы устройства. Указанная цель достигается тем, что в устройстве для замены измерительных или пробоотборных зондов, размещенном на консоли и приводимом в движение с помощью установочных средств, подвес захвата выполнен в виде внутренней и наружной поворотных рам, оси поворота которых расположены под углом друг к другу, а точка пересечения осей лежит на вертикальной оси пики, при этом захват размещен на внутренней раме с возможностью повороту вокруг точки, лежащей выше егр центра тяжести, или рамы снабжены упругими возвратными уст- ройствами. 1 з.п. ф-лы, 5 ил. I СО с
см
14
Изобретение относится к устройствам для замены измерительных и/или пробостборных зондов, которые при фрикционном контакте могут быть надвинуты на крепежный узел, рас- положенньш на нижнем конце вертикапь но подвижной стрелы копья, имеющей зажимаюЕф-ш зонд захват, которьш имеет возможность отвода из рабочей позиции, расположенной под стрелой, в другую пози1);ию.
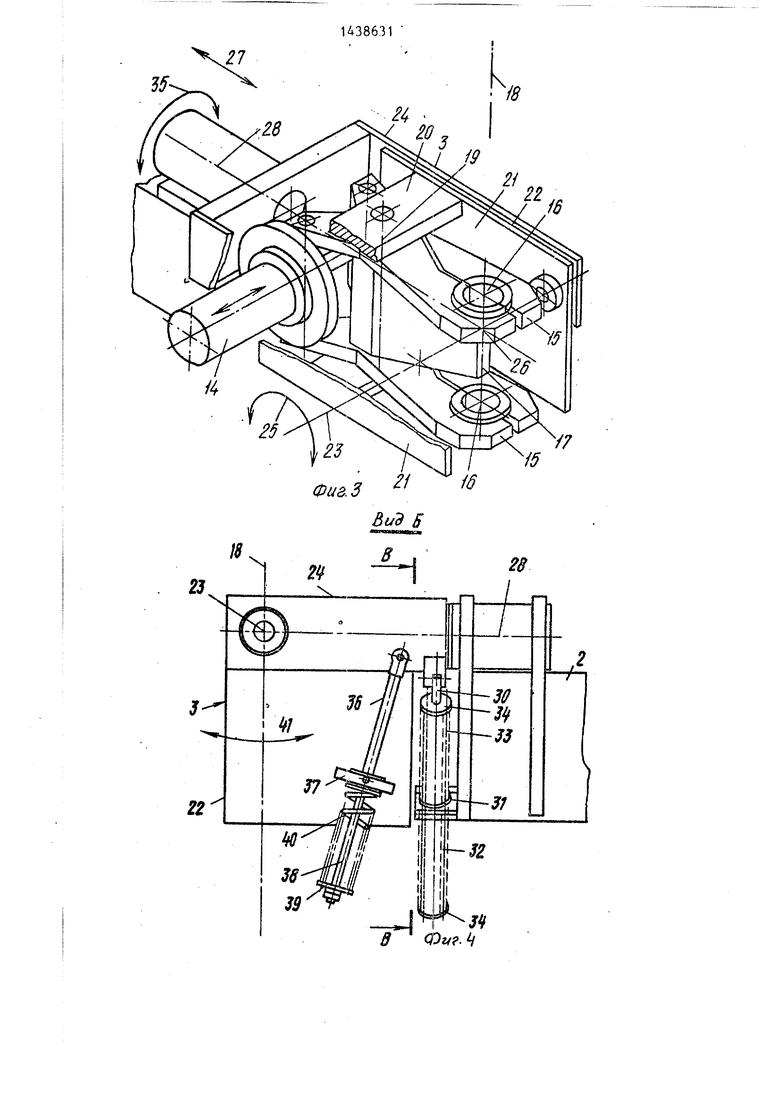
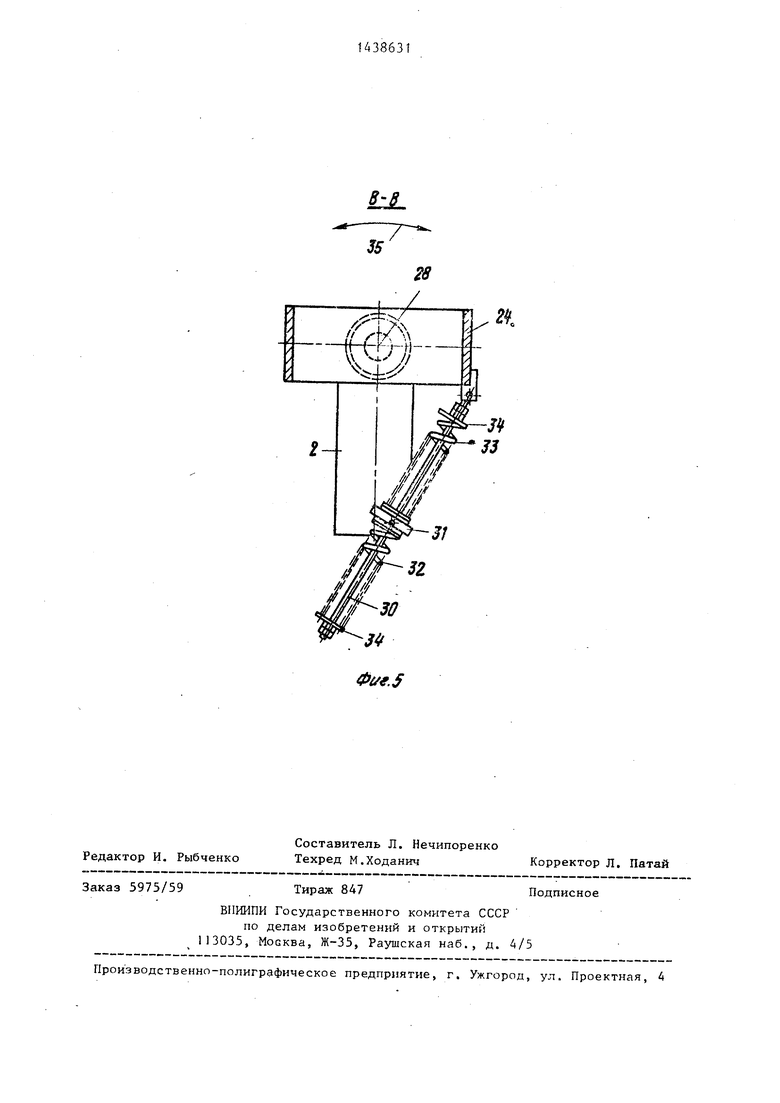
Целью изобретения является повышение надежности работы устройства,, На фиг. 1 изображено установленное в сталелитейном производстве устройство для замены измерительных шп1 пробоотборных зондов, вид сверху; на фиг. 2 вид на фиг. 1f на фиг. 3 - захват, в аксонометрии; на фиг. 4 - вид Б иа фиг. 1; на фиг. 5 - разрез на фиг. 4.
Устройство содержит специальньй манипулятор 1, которьш имеет зак- репленньш на консоли 2 захват 3 для принятия зонда 4 из магазина 5, переноса зонда 4 к стреле 6 и снятия зонда 4 со стрелы 6. Манипулятор имеет поворотную вокруг вертикальной оси 7 посредством привода 8 в направлении стрелки 9 стойку 10, н которой установлена в опорах вращения и с возможностью перемещения в вертикальном направлении тележка 11. Последняя служит для базирования перемещаемоц в горизонтальном направлении консоли 2, на свободном конце 12 которой смонтирован зажимающий ;зонд 4 захват 3. Зонд 4 посредством : захвата 3 может быть изъят из ма газина 5 путем поворота вокруг оси 7 и переноса под стрелу 6. Благодаря опусканию стрелы 6 зонд надвигается на смонтированный на стреле крепеж- ;ный узел, который выполнен в виде удерживающего стержня 13. Для снятия зонда 4 со стрелы 6 после проведения измерений и отбора проб зонд 4 зажимается посредством захвата 3, а стрела б поднимается, благодаря чему зонд 4 снимается с удерживающего стержня 13, после чего зонд переносится посредством захвата 3 на передаточную позицию.
Захват снабжен гидравлическим цилиндром 14 и двумя находящимися вер |тикально друг над другом парами цан- |говых кулачков 15, открываемых и закрываемых посредством гидравли
5
0
5
0
5
0
5
0
5
ческого цилиндра 14, между соосными круглыми выемками 16 которых может быть зажат измерительный онд 4. Проходящая через круглые выемки ось 17 сооспа с осью 18 стрелы 6 в рабочей позиции захвата 3 (см. фиг. 1 и 2), Опорная ось 19 пары цанговых . кулачков 15 закреплена в поперечинах 20, которые вместе с вертикальной плитой 21 образуют внутреннюю раму 22. Внутренняя рама 22 установлена на опорах вращения с возможностью поворота вокруг горизонтальной поворотной оси 23 относительно внешней рамы 24, охватывающей внутреннюю раму, благодаря чему пары цанговых кулачков 15 имеют возможность поворота относительно внешней рамы 24 в направлении стрелки 25.
Поворотная ось 23, связывающая внутреннюю раму 22 с внешней рамой 24 пересекает проходящую через круглые выемки 16 ось 17 в точке 26. Внешняя рама 24 имеет возможность поворота на консолн 2 вокруг расположенной параллельно направлению 27 перемещения консоли 2 горизонтальной оси 28, которая установлена под углом к поворотной оси 23. близким к 90 . Ось 28 пересекает поворотную ось 23 также в точке 26.
Оси 23 и 28 образуют карданный подвес захвата 3 так что проходящая через крупные выемки 16 ось 17 может быть выверена в любом направлении. Тем захват 3 может самостоятельно центрироваться на расположенном наклонно удерживающем стержне 13 6, на который долркен быть надвинут зонд 4, что предотвращает повреждение предусмотренного на удерясивающем стержне контакта 29 и обеспечивает безупречную.посадку зонда 4 на удерживающем, стержне 13, предотвращающую повреждения зонда 4.
Чтобы захват 3 в положении покоя занимал стабильно нормальную позицию внешня.я рама 24 по отношению к консоли 2 подпирается посредством расположенной в плоскости, перпендикуляр- ной оси 28, тяги 30 (фиг. 4 и 5), которая с одной стороны шарнирно соединена с внешней рамой 24, а с другой стороны посредством скользящего кольца 31 - с консолью. С обеих сторон в скользящее кольцо 31 упираются с предварительным натяжением винтовые
пружины 32 и 33, которые по мере надобности упираются своими концами, противоположньми скользящему кольцу, в закрепленные на тяге 30 опорные пластины 34.
Из фиг, 5 показана нормальная позиция внешней рамь: 24 по отношени к консоли 2. Как только внешняя рама 24 отклоняется, поворачиваясь вокруг оси 28, относительно консоли 2 в одном из направлений по стрелке 35, одна из пружин сжимается, а другая растягивается. Появляющиеся, при этом неравные пружинные силы воздействуют в качестве возвратных сил й стремятся после отклонения внешней рамы 24 возвратить ее в нормальную позицию.
На фиг. 4 показано опирание внешней рамы 24 по отношению к внутренней раме 22, причем тяга 36 закреплена с одной стороны на внешней раме 24, ас другой стороны посредством скользящего кольца 37 - на внутренней; раме 22. При удлинении тяги 38 винтовая пружина упирается в опорную пластину 39. Противоположны конец пружины 40 упирается в ск&пъ- зящее кольцо. Как только внутренняя рама 22 поворачивается относительно внешней рамы 24 в одном из направлений по стрелке 41, сжимающаяся или разжимающаяся при этом пружина 40 стремится возвратить внутреннюю раму в нормальную позицию, в которой пружина 40 уравновешивает крутящий момент от собственного веса внутренней рамы 22 вместе с парами цанговых кулачков 15.
Захват 3 может быть сконструирован таким образом, что общая точка поворота внешней и внутренней рам 24 и 22 и пар цанговых кулачков 15 (вместе с гидравлическим цилиндром. 14) приходит в положение, расположенное ниже точки 26 пересечения осей 23 и 28 карданного подвеса. В этом случае обеспечивается возвращение захвата 3 в нормальную позицию благодаря собственному весу захвата без использования пружин 32, 33 и 40.
Чтобы при введении удерживающего стержня 13 в отверстие 42 зонда 4 не произошло нежелательного отклонения зонда 4 от оси 17, удерживающий стержень 10 входит в фрикционный контакт с зондом в промежутке 43,
10
15
20
25
438631
находящемся ниже точки 26 пересечения осей 23 и 28 карданного подвеса. Из-за одностороннего температур- ного воздействия на стрелу 6 внутри металлургической емкости может произойти искривление стрелы 6, что приводит к несоосности крепежного стержня 13 и зонда 4, удерживаемого в позиции надвигания с помощью захвата 3. Для обеспечения возможности надвигания зонда 4 на удерживающий стержень на захвате 3 предусмотрено центрирующее устройство 44.
Устройство работает следующим образом.
Захват 3 расположен на консоли 2, которая размещена с возможностью перемещения на поворотной стойке 10 посредством тележки 11. За счет вращения стойки 10 захват может поворачиваться в направлении стрелки 9 (фиг. 1). Поворот захвата вокруг вертикальной оси 7 не является обязательным, поскольку возможность движения захвата зависит от расположения магазина , Захват при помощи регулирующих средств можно приводить из рабочего полол сния под стрелой в другое положение.
Центрирующее устройство 44 позволяет выправлять стрелу со стержнем над зондом 4.
Зонд с центрирующим устройством не контактирует, так как центрирующее устройство служит только для центрирования стержня, когда его вводят в зонд. Зонд 4 удерживается только за счет выемок 16. Если стрела или стержень искривлены, то при извлечении зонда во время замыкания пар цанговых кулачков 15 при их контакте с зондом происходит выправление цанговых пар соответственно зонду, занимающему наклонное положение. Такое выправление возможно благодаря карданной установке захвата, то есть благодаря возможности поворота захвата в любом направлении. Цанговые кулачки 15 надежно удерживают как новый зонд, так и зонд, диаметр которого во время эксплуатации несколько изменился.
При проведении измерительного процесса, т.е. при отборе проб путем погружения зонда в емкость, содержащую наблюдаемый расплав, например в сталеплавильный конвертер, может произойти изгиб несущего: зонд крепеж30
35
40
45
50
55
ного узла или всл ствие наезда зонда на еще расплавленный материал, ил вследствие столкновения зонда с,кусками шлака, плавающими на расплавленном материале. После отвода назад стрелы зонд занимает наклонное положение, из-за чего, он не может быть надежно захвачен захватом.
Трудности возникают при захвате следующего зонда, так как зонд - для восприятия толкающих сил при надвигании зонда на крепежный узел - удерживается захватом в точно вертикальном положении по возможности жестко. При надвигании на крепежный узел стрелы,, что осуществляется, как правшю, путем опускания стрелы, вследствие несоосности крепежного узла и зонда может произойти повреждение или разрушение зонда крепежным узлом, а также повреждение контактов крепежного узла; что Может стать Причиной ошибочных измерений и привести к невозможности дальнейшего проведения измерений.
Предлагаемое устройство позволяет осуществить надежное надвигание зонда на крепежный узел, занимающий относительно зонда отличное от идеаль- ного положение, причем предотвращаются повреждения крепежного узла и зондов и после проведения измерений зонды надежно захватываются захватом.
Это возможно благодаря карданному подвесу захвата, который может при контакте с измерительным зондом и крепежным узлом самостоятельно приспосабливаться к их положению.
Захват может поворачиваться, выходя из положения покоя, против действия возвратных сил, причем возвратные силы вызваны или эластичным органом, или расположением центра тяжести захвата ниже точки пересечения осей карданного подвеса. Благодаря
этому захват после надвигания зонда на крепежный узел всегда самостоятельно возвращается в исходное положение. Чтобы захват и к началу надвигания занимал стабильное положение, крепежный узел попадает в фрикционный контакт с зондом в промежутке ниже точки пересечения осей карданного подвеса.
Формула изобретения
0
5
0
5
ти, или рамы снабжены упругими возвратными устройствами.
- - j- ; --: rT- T i т
IT,J J-L - У.Г , - - - - J - 1
f T . - ili
Wi/dt/
Фи&
9
,
В
2if В
28
Л
д Фг/.
| ЛАЗЕРНАЯ СИСТЕМА С ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2753161C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
