XDV
И
iK
сообщены с выходами трехпозиционного четырезсходового режимного распределения (Р) 5, В средней позиции Р 5 кго выходы заперты, а входы сообщены между собой., Один из входов Р 5 сообщен магистралями 7 и 8 соединяющ1Ф1и штоковые полости ГЦ 9 и 10, а другой - с одним из выходов Р 3 с электроуправлением. Второй выход Р 3 свя зан с магистралью 8j соединяющей штоковые полости ГЦ 9 и 10 со сливом.
Схема обеспечивает управление в ручном и автоматическом режимах глубиной копания машины в двух вариантах - от дна или от базы. В каждом вариан- те обеспечивается управление подъемом РО по сигналу задатчиков с помощью одного или группы ГЦ и установка второго (группы) ГЦ в плавающее положение о При нейтральной Позиции Р 3 и 5 фиксируется заданное положение ГЦ 9 и 10. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления положением рабочего органа землеройной машины | 1988 |
|
SU1553633A1 |
| Гидропривод рабочего оборудования бульдозера двустороннего действия | 1988 |
|
SU1602956A1 |
| Каналокопатель | 1985 |
|
SU1305269A1 |
| Гидропривод рабочего оборудования скреперного поезда | 1989 |
|
SU1694799A2 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Гидропривод бурильной машины | 1988 |
|
SU1596107A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1745844A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1308722A1 |
Изобретение относится к мелиоративному машиностроению и позволяет повысить надежность работы системы управления рабочим органом (РО) дре- ноукладчика. Для этого штоковые полости гидроцилиндров (ГЦ) 9 и 10 перемещения РО сообщены между собой и посред(;твом общей магистрали 6 со сливом. Поршневые полости ГЦ 9 и 10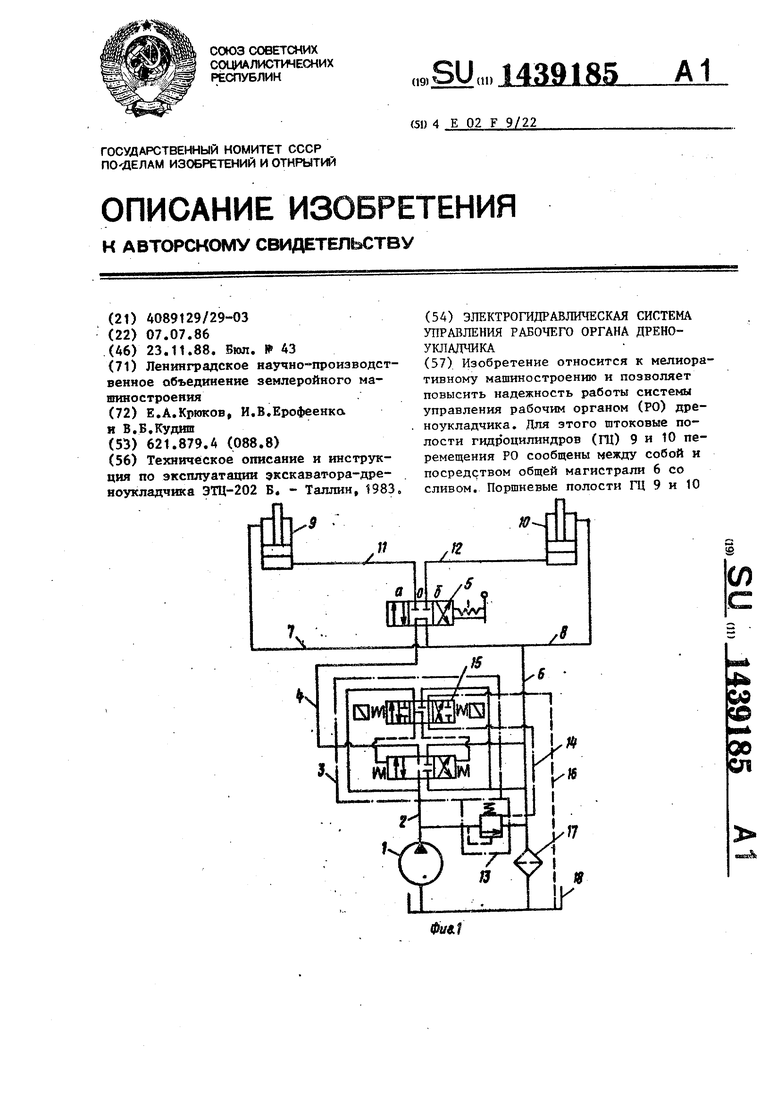
t
Изобретение относится к мелиоративному машксностроению а именно к мащинам с автоматически ; управлением положением рабочего органа с помощью электрогилрг.влических систем.
Целью изобретения является повышение на,цежности работы системы,
На фиг.1 изображена электрогидравлическая система управления рабочего органа дреноукладчйка| на фиг,2 - экскаватор-дрено тсладчшсд общий вид
Насос 1 соединен гидролинией 2 с распределителем 3 с электрогидроуп- равлениемо Один вькод распределителя 3 соединен гидролинией 4 с подводом трехпозициокного четыре- сходового режимного распределителя 5, второй выход распределителя 3 соединен со сливной гидролинией 6. 5ыход распре- дел ителя 5 в свою очередь соединен гидролиниямкс 7 и 8 со штоковыми полостями гидроцилиндров ) и to (на- Пример, опорной лыжи и подъема рабо- че1 о органа соответственно) и одновременно со сливной г1-щзтолинией 6.,
Отводы распределителе ; 5 соединены гидролиниямк: 11 и 12 с noprniieabn i полостями цилиндров 9 и 10. Между напорной 2 и сливной 6 гидролиниями установлен предохранительный клапан 13 с гидролкнией 14, Гидфолиния 14 подводится к пилоту 13 электроп-зд роуправляемого распределителя 3 к подводу дистанционного :1гщ)авления к далее гидролинией 16 сое, с бакомо
На сливной гидролинии б установлен фильтр 17, соединениь й с баком 18
o
0
Схема обеспечивает управление в ручном и автоматическом режимах глубиной копания землеройной машины в двух вариантах (например, от дна или от базы). В каждом из вариантов обеспечивается управление подъемом рабочего органа по сигналу задатчиков с помощью одного или группы гидроци- линдров и установка второго (группы) гидроцилиндра в плавающее положение. При нейтральной позиции распределителей гидроцилиндры фиксируются в заданном положении. Насос 1 подает по напорной гидролинии 2 рабочую жидкость к гидрораспределителю 3 с элек- трогидроуправлением от пилота 15 и одновременно к предохранительному клапану 13 с подводом потока управления разгрузкой.
При нейтральном положении золотника пилота 15 линия управления разгрузкой предохранительного клапана 13 по ri-щролиниям 14 и 16 соединяется со сливом. Происходит разгрузка предохранительного клапана 13 на coca 1. При нейтральном положении О распределителя 5 поршневые полости гидроцилиндров 9 и 10, обеспе™ чивающие подъем элементов рабочего органа, закрыты, рабочий орган нахо дится в фиксированном положении.
В положении а распределителя 5 гидролинии 11S, 4 и 12 5 8 попарно соединяются. Гидроцилиндр 10 переходит в плавающее положение, т.е. обе полости соединены со сливом через фильтр 17, создающий некоторый
/7/ /// /У/ /X/ /V/ /У/ //Х /// /// f// /XX vVX /ХХ ХХХ
фи€.2
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| - Таллин, 1983. | |||
