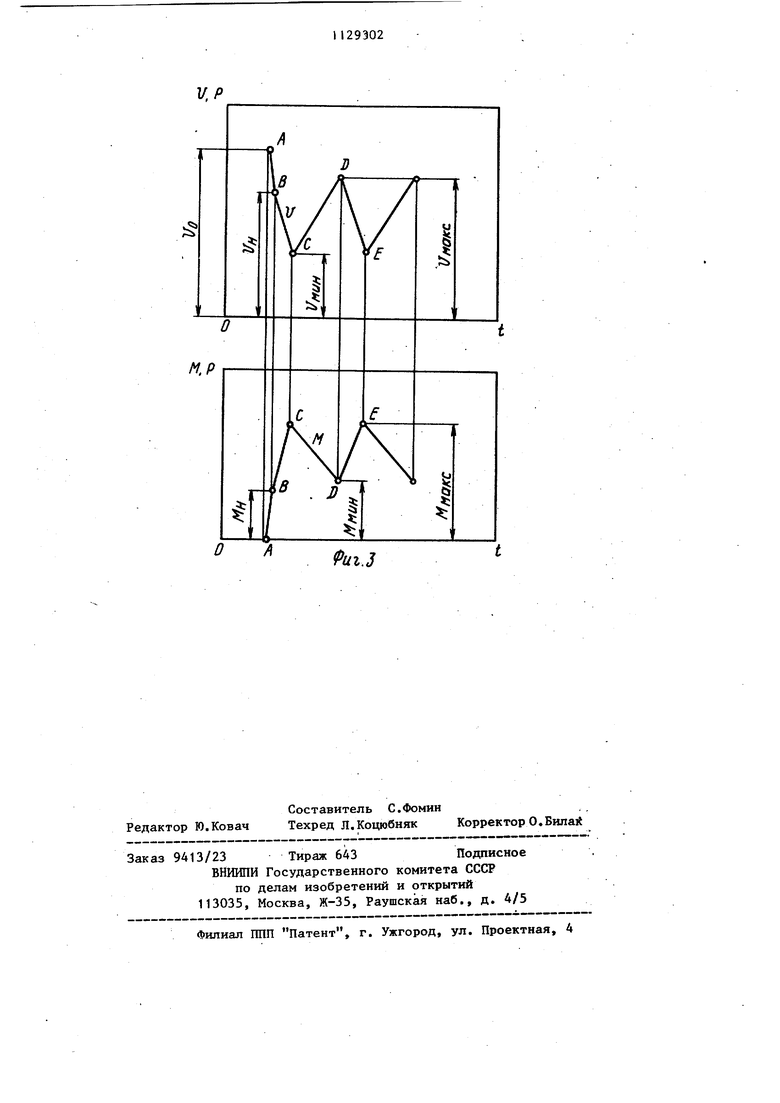
1 Изобретение относится к строител но-дорожным машинам, а именно к гид росистемам управления рабочим обору дованием бульдозеров. Наиболее близкой к предлагаемой является гидросистема управления рабочим процессом бульдозера, включающая датчик сигнала управления, элемент сравнения, элемент настройк сигнала управления, основной и дополнительный распределители Cl.3. Однако данная гидросистема не позволяет оптимизировать начальное заглубление рабочего органа в грунт и неравномерность сигнала управлени что приводит к частым включениям и выключениям золотника распределител и снижает производительность машины Цель изобретения - повьпиение про изводительности бульдозера путем оп тимизации начального заглубления рабочего органа в грунт и неравномерности сигнала управления. Указанная цель достигается тем, что в гидросистеме управления рабо:чим процессом бульдозера, включающей датчик сигнала управления, элемент сравнения, элемент настройки сигнала управления, основной и допо нительный распределители, дополни- тельньй распределитель выполнен с гидролиниями управления, а гидросис тема снабжена установленными последовательно в одной из гидролиний управления дополнительного распреде лителя датчиками начала и окончания заглубления и датчиком неравномерности сигнала управления, при этом датчик начала заглубления выполнен в виде клапана давления, а датчики Окончания заглубления и неравномерности сигнала выполнены в виде пере ливных клапанов. На фиг. 1 изображена гидросистем управления рабочим процессом бульдо зера по скорости движения; на фиг.2 то же, по крутящему моменту турбинного колеса гидрот{)ансформатора; на фиг. 3 - диаграмма управления рабочим процессом бульдозера. Силовые гидроцилиндры 1 вертикал ногр перемещения отвала 2 бульдозера подключены к основному распределителю 3 и дополнительном распределителю 4 гидромагистрали 5 и 6. Дополнительный распределитель 4 гид ромагистралями 7 и 8 также подключен к рабочим полостям гидроцилинд ров 1 вертикального перемещения 22 отвала. Торцовые полости золотника дополнительного распределителя 4 соединены с гидросистемами 9 и 10, в которые включен клапан 11 разгрузки, соединенный со сливной гидролинией 12. Гидронасос 13 связан с механизмами трансмиссии тягача, соединенными с валом турбины гидротрансформатора. В гидролинию 14 сигнала управления включен дроссель 15, служащий для преобразования сигнала подачи рабочей жидкости гидронасосом 13 в сигнал давления. Выходная гидролиния дросселя 15 соединена со сливной гидромагистралью 16. К гидролинии 14 сигнала управления подключены датчик 17 начала заглубления отвала, датчик 18 окончания заглубления отвала, датчик 19 сигнала управления и датчик 20 неравномерности сигнала управления. Датчик 17 соединен гидролинией 21 с гидролинией 9, датчик 18 соединен гидролинией 22 с гидролинией 9 и гидролинией 23 со сливной гидролинией 12, датчик 19 соединен гидролинией 24 с гидролинией 10, датчик 20 гидролинией 25 связан с гидролинией 10 и гидролинией 26 со сливом. Гидролинии 9 и 10 через обратные клапаны 27 и 28 соединены со сливной гидролйнией 12. Гидронасос 29 подключен к гидробаку 30 и распределителям 3 и 4. Датчики 17. и 19 по конструкции являются клапанами давления, вьшолняющими функции элементов сравнения, и содержат элементы настройки на соответствуюрогю величину давления (сигнап управления). Датчики 18 и 20 по конструкции являются переливными клапанами, настроенными на соответствующее давление, и выпо:г1няют функции запоминающего устройства. Указанные датчики в гидросистеме вьтолняют функции логического устройства. На фиг. 2 дополнительно показаны элемерты гидросистемы при управлении процессом копания по крутящему моменту М тзфбинного колеса гидротрансформатора. Насосное колесо 31 гидротрансформатора соединено с валом двигателя бульдозера, турбинное колесо 32 через механические передачи связано с колесами тягача. Направляющий аппарат 33 гидротрансформатора соединен с валом 34 311 и кронштейном 35, соединенным с гидроцилиндром 36, в котором помещена пружина 37., В гидромагистрапь 14 включен двупозиционный распределитель 38 с обра ным клапаном 39. На фиг. 3 верхняя кривая является диаграммой управления процессом копания грунта по скорости V движения бульдозера, а нижняя - по крутящему, моменту М на валу турбины гидротранс форматора. Точки на диаграммах характеризуют следующие состояния рабочего процесса бульдозера: А ч начало заглубления рабочего органа в грунт, при котором скорость движения равна максимальной начальной скорости, а момент на турбине В - прекращение начального заглубления рабочего органа в грунт, когда скорость движения равна У„ и крутящий момент турбинного колеса М|., которым на фиг. 1 и 2 соответствует толщина стружки li - начальноного заглубления (там же 1i- текущее значение толщины вырезаемой стружки) С - начало выглубления отвала, которому соответствует заданное значение максимальной силы сопротивления, минимальная скорость движения V . и максимальный крутящий момент М fnj,, на валу турбины гндротрансформатора1 D- окончание выглубления рабочего органа, которому соответствует за данное максимальное значение силы сопротивления на отвале, максимальная скорость двизцения Л/(,, и минимальный крутящий момент М .,„ тур б1лнного колеса гидротрансформатора-, Р - давление в гидролинии 14, соответствующее скорости движения V или крутящему моменту М турбины гидротрансформатора. Гидросистема управления рабочим процессом бульдозера работает следую щим образом. Регулирование сопротивления копаншо по косвенному параметру - скорости движения бульдозера осуществля ется гвдросистемой, показанной на фиг, 1. Гидронасос 13 получает привод от механизмов, связанных с валом турбинного колеса 32 гидротрансформатора, и поэтому его расход пропорционален угловой скорости турбинного колеса 32 и скорости поступательно4го движения бульдозера. При помощи дросселя 15 сигнал расхода преобразуется в давление в гидромагистрали 14, по сигналу которого осуществляется управление рабочим процессок. На диаграмме управления (фиг. 3) значениям скорости V поступательного движения соответствуют определенные давления Р жидкости перед дросселем 15. Перед началом процесса копания отвал 2 бульдозера находится над грунтом, а тягач перемещается на рабочей передаче. Для перехода на автоматический режим процесса копания грунта осуществляется включение привода (не показан) насоса 13. Начальный этап процесса копания соответствует точке Л диаграммы, в которой давление Р. в гидролинии 14 имеет наибольшее значение вследствие большой скорости V движения бульдозера при отсуствии сопротивления на отвале. В этот момент срабатывает датчик 17начала заглубления рабочего органа. По гидролийиям 21 и 9 давление от гидролинии 14 пepeдaetcя к торцовой, полости золотника дополнительного распределителя 4, который перемещается вниз. С этого момента рабочая жидкость гидронасоса 29 подается по гидромагистралям 8 и 6 в поршневые полости гидроцилиндров 1, осуществляющих заглубление отвала 2 в грунт. В момент срабатывания датчика 17 срабатывает датчик 20, соединяя гидрол инию 10 со сливной гидролинией t2. По мере заглубления отвала 2 увеличиваются сопротивления копанию, снижается скорость V и давление Р в пад ролинии 14, Тидрозолотник распределителя 4 остается включенным, так как клапан 17 запирает гидролинию 9 до срабатьтания датчика 18, Датчик 18срабатывает при давлении Р, осуществляя соединение гидролинии 9 через гидролинии 22 и 23 со сливной гидролинией 12, В этот момент золотник дополнительного распределителя 4 своими пружинами устанавливается в нейтральное положение, процесс заглубления отвала 2 прекращается. . Таким образом, выполнено начальное заглубление отвала 2 на толпщну стружки 11, величину которой можно регулировать настройкой давления сра батывания датчика 18. Далее процесс копания грунта совершается при зафиксированном (неуправляемом) положе нии отвала 2, при этом толщина струж ки ti увеличивается и возрастает объе призмы грунта перед отвалом 2. Вследствие возрастания сопротивления копанию происходит уменьшение скорости V движения машины и давлени Р в тидролинии 14. При давлении Р соответствуюп;ем точке С диаграммы (фиг. 3), срабатывает датчик 19 сигнала управления, которьм соединяет гидролинию 14 через гидролинии 24 и 10 с нижней торцовой полостью золотника дополнительного распределителя 4, осуществляя включение его вверх. Рабочая жидкость гидронасосом 29 по гидромагистралям 7 и 5 подается в штоковые полости гидроцилиндров 1, осуществляя выглубление отвала 2. Одновременно в момент срабатьгоания датчика 19 срабатьгоает клапан 1 разгрузки, который соединяет гндролинию 9 со сливной гидролинией 12, обратные клапаны 27 и 28 осуществляют подпитку рабочей жидкости к торцовым полостям золотника дополнительного распределителя 4. Вследствие уменьшения толщины вьфезаемой стружки и ропротивления копанию возрастает скорость V движения машины и давление Р в гидролинии 14о Выглубление отвала 2 происходит до момента срабатьшания датчика 20, которьй соединяет гидролинию 10 через гидролинии 25 и 26 со сливной гидролинией 12, В этот момент золотник дополнительного распределителя 4 устанавливается в нейтральное положение Выглубление отвала 2 закон чилось и далее процесс копания продолжается при зафиксированном неуправляемом отвале 2. Последующий процесс копания на участке DE диаграммы (фиг. 3) совершается аналогично процессу на участке ВС. i i Таким образом, предлагаемая гидро система позволяет осуществлять до зированное заглубление отвала 2 бульдозера на заданную величину срезаемой стружки Ь и регулировать процесс копания по скорости движени бульдозера в пределах скоростей V Это позволяет независимым образом регулировать и настраивать каждый из трех указанных параметров, с осуществляя оптимизацию процесса копания грунта. По окончании процесса копания, соответствующего максимальному объему призмы грунта перед отвалом 2, начинает ся процесс транспортирования грунта. Для перехода на транспортньй режим работы выключается привод насоса 13 и золотник распределителя 3 устанавливается в плавающее положение. На фиг. 2 показана гидросистема управления отвалом 2 бульдозера по крутящему моменту М турбины гидротрансформатора. Вал 34 направляющего аппарата 33 гидротрансформатора через рычаг 35 осуществляет сжатие пружины 37 гидроцилиндра 36, При этом давление Р в поршневой полости гидроцилиндра 36 и гидролинии 14 оказывается пропорциональным крутящему моменту турбины 32 гидротрансформатора. Диаграмма управления процесса копания, соответствующая этому случаю, показана в нижней части фиг. 3. Регулирование процесса копания грунта по крутящему моменту М происходит следующим образом (фиг. 2). Для перехода на автоматический режим процесса копайия двупозиционньй распределитель 38 включается в положение, показанное на фиг. 2. Бульдозер перемещается на рабочей передаче. При отсутствии сопротивления на отвале крутящий момент, соответствующий точке А диаграммы (фиго 3), и давление Рд в гидромагистрали 14 минимальны (Мд 0). Вследствие этого датчик 17 начала заглубления отвала соединяет гидролиннзо 14 через гидролинии 21 и 9 с верхней торцовой полостью золотника дополнительного распределителя 4, осуществляя включение его вниз. Рабочая жидкость от гидронасоса 29 по гидромагистралям 8 и 6 подается в поршневые полости гидроцилиндра 1, осуществляющие заглубление рабочего органа. Одновременно при срабатывании датчика 17 переключается клапан 11 разгрузки, который соединяет гидролинию 10 со сливной гидролинией 12. При заглублении отвала 2 бульдозера сопротивление копанию, крутящий момент М на валу турбины и давление Р в гидролинии 14 возрастают. Заглубленке отвала происходит до момента срабатывания датчика 18, который настроен на давление Рр, соответствующее точке В диаграммы (фиг. 3). Датчик 18 окончания заглубления срабатывает при давлении Pg и соединяет гидролинию 9 через гидролинии 22 и 23 со сливной гидролинией 12. В этот момент золотник дополнительного распределителя 4 устанавливается в нейт ральное положение, прекращая заглубление отвала 2. Таким образом, выполненб начальное заглубление отвала 2 бульдозера на толщину стружки 1i. Далее процесс копания совершается при неуправляемом отвале 2. Сопротивление копанию возрастает вследствие увеличения объема призмы rpyHja перед отвалом 2 и увеличения толщины стружки Ь путем самозаглубления отвала 2. Этому этапу процесса копания соответствует участок ВС диаграммы (фиг. 3). В точке С диаграммы сопротивление копанию и крутящий момент М турбины гидротран форматора достигают максимального заданного значения. При давлении Р. в гидролинии 14 срабатывает датчик 19 сигнала, управления, гидролиния 14 через гидролинии 24 и Ю соединя ется с нижней торцовой полостью золотника дополнительного распределителя 4, который переключается вверх .Рабочая жидкость от гидронасоса 29 по гидромагистралям 7 и 5 подается к штоковым полостям гидроцилиндров 1, осуществляющих вьсглубление отвала 2. Одновременно при срабатывании да чика 19 датчик 18 соединяет гидроли нию 9 со сливной гидролинией 12. При выглублении отвала 2 уменьшаются толщина стружки , сопротивление копанию и крутящий момент М турбины ги poтpaнcфopмaтopa. Этот этап процесса копания соответствует участку СГ диаграммы процесса копания (фиг. 3). Выглубление отвала 2 приводит к соответствующему уменьшению давления.Р в гидролинии 14 и при давлении Р срабатьшает датчик 20 неравномерности сигнала управления. Гидролиния 10 через гидролинии 25 и 26 соединяется со сливной гидролинией 12, при этом золотник дополнительного распределителя 4 переключается пружинами в нейтральное положение, что приводит к окончанию выглубления отвала 2 бульдозера. Обратные клапаны 27 и 28 обеспечивают подпитку торцовых полостей дополнительного распределителя 4 рабочей жидкостью из гидросистемы. Обратньй клапан 39 обеспечивает подпитку рабочей жидкостью гидроцилиндра 36. Далее процесс копания на участке CD диаграммы совершается аналогично процессу копания для участка ВС. Процесс копания грунта заканчивается после создания перед отвалом 2 максимальной призмы грунта. Для перехода на режим транспортирования грунта золотник двупозиционного распределителя 38 переключается вправо, при этом золотник распределителя 4 устанавливается в нейтральное положение, а золотник распределителя 3 устанавливается в плавающее положение. 1 Й:УЛУ/ У/4ЭД / 2 т: xEI 20 17 / . 5 Дй26/r 24 25
У
X
4
ч. I
27-- 11
10
/2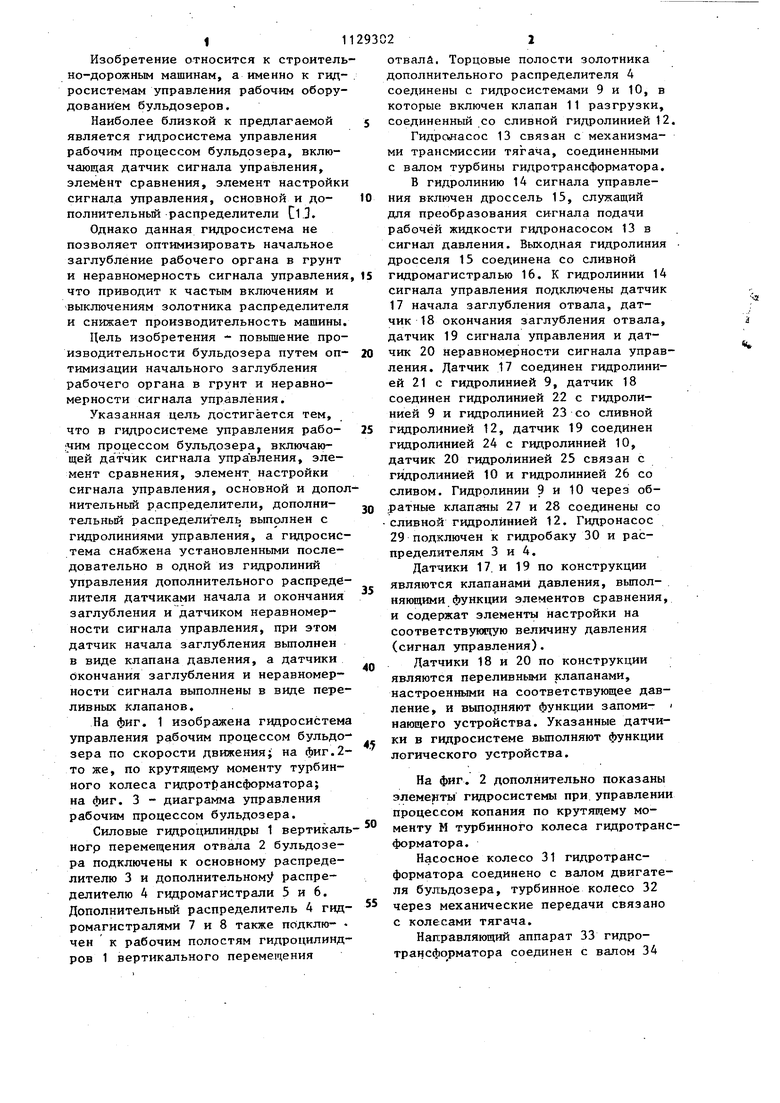

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Гидросистема управления рабочим органом бульдозера | 1985 |
|
SU1240840A1 |
| Бульдозер | 1981 |
|
SU962481A1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 2016 |
|
RU2624079C1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| ГИДРОПРИВОД БУЛЬДОЗЕРА | 2019 |
|
RU2705627C1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 1996 |
|
RU2109883C1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Стенд для исследований процесса копания рабочими органами землеройных машин | 1988 |
|
SU1698379A1 |
хзгч
(.
г.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического регулирования толщины стружки, срезаеемой землеройно-транспортной машиной | 1968 |
|
SU464688A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
