4
х-
1чЭ
U-LS J-- С„ --
J
Изобретение относится к транспортным средствам для перевозки длинномерных крупногабаритных грузов, в частности металлоконструкций, механизмов, блоков технологического оборудования, от места разгрузки и складирования к месту монтажа.
Целью изобретения является повышение маневренности при транспортировке груза.
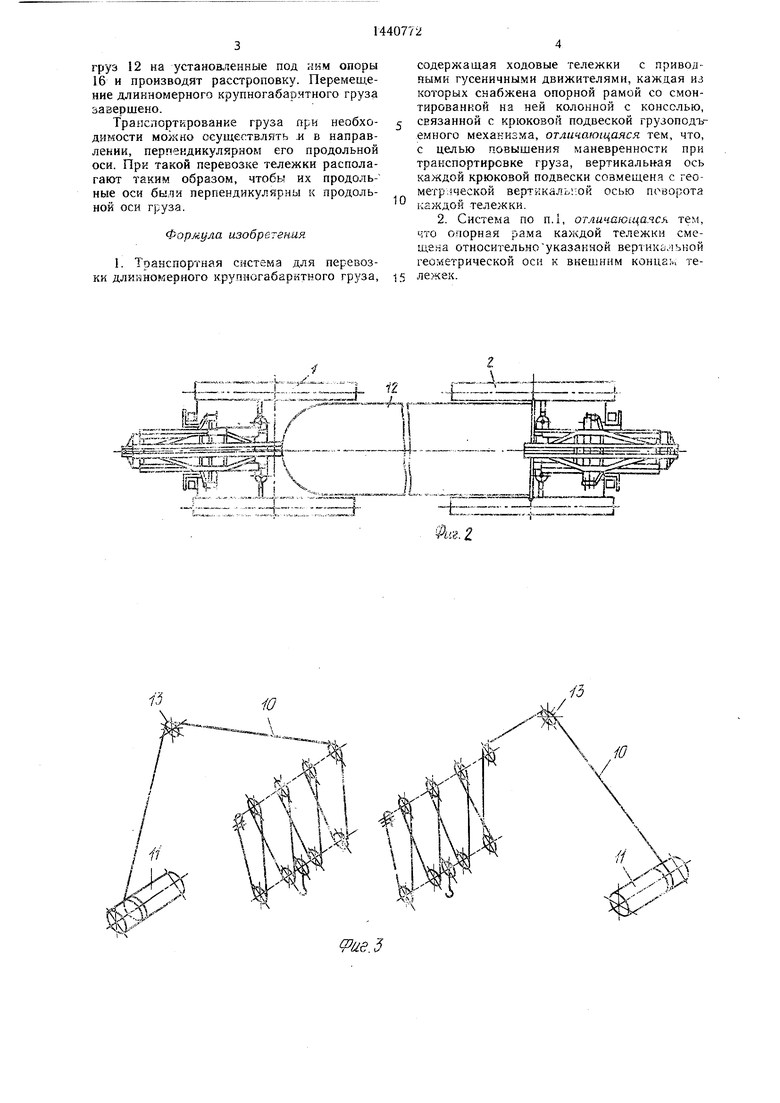
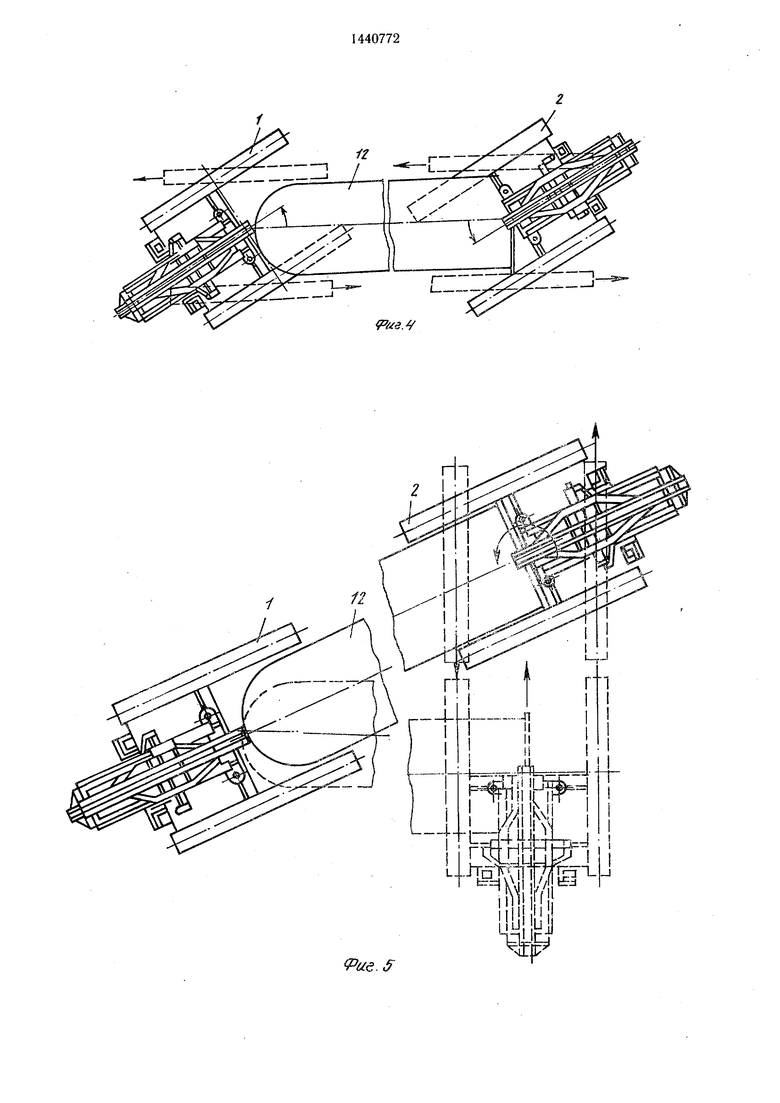
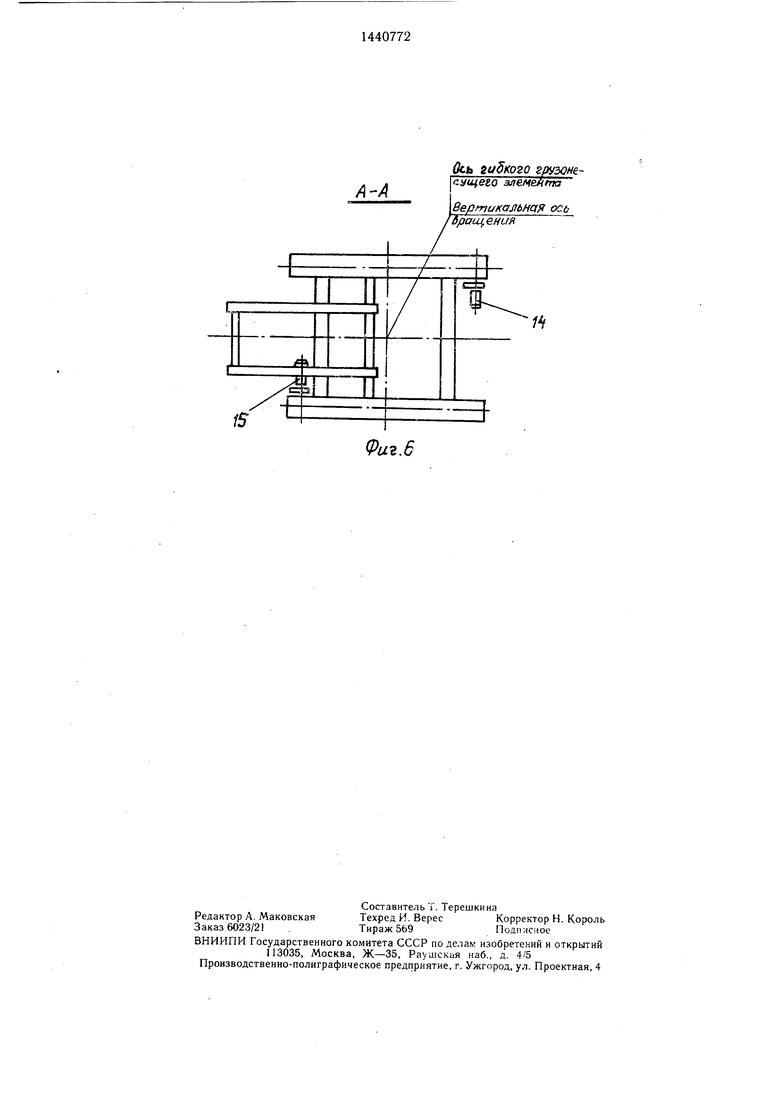
На фиг. 1 изображена транспортная система для перевозки длинномерного крупногабаритного груза, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - схема за- пасовки полиспастов грузоподъемных ме.ха- низмов транспортного средства; на фиг. 4 - схема поворота транспортной системы, вариант; на фиг. 5 - то же; на фиг. 6 - разрез А-А на фиг. 1.
Транспортное средство состоит из передней 1 и задней 2 тележек, каждая из которых снабжена неповоротной опорной частью в виде рамы 3 со смонтированной на ней колонной 4. Один конец консольной фермы 5, шарнирно закрепленной на колонне 4, соединен вертикальной оттяжкой 6 с рамой 3, а другой - с гибким грузоне- сущим элементом, состоящим из грузового полиспаста 7, шарнирно прикрепленного к нему с возможностью вращения вокруг вертикальной оси крюковой подвески 8 и тросового подвеса 9 грузоподъемного механизма. Вертикальная ось крюковой подвески 8 гибкого грузонесущего элемента находится в пределах опорного контура тележек 1, 2 и совпадает с вертикальной геометрической осью вращения последней. Грузовой канат 10 полиспаста 7 закреплен на барабане лебедки 11 подъема груза 12 и проходит через отводной блок ,13, закрепленный на консольной ферме 5. Тележки 1 и 2 снабжены гусеничными движителями, а их опорные рамы 3 смещены относительно вертикальной геометрической оси каждой тележки к их внешним концам. Тележки 1 и 2 С11абжены вы} осными пультами управления, объединяющими электроприводы каждой тележки в общую электрическую систему (не показаны). На пультах управления предусмотрен выключатель, производящий од1ювременную остановку тележек.
Механизм передвижения те ;ежек включает двигатели 14 и 15 с независимым управлением на правую и левую гусеницы, в цепь которых включены сопротивления ограничения пусковых .токов и моментов, а также магнитные пускатели. Независимый пуск электродвигателей передвижения тележек 1 и 2 позволяет включать электродвигатели одновременно в одну и в разные стороны. Механизм подъема включает электродвигатель лебедки с магнитным пускате- лем и ограничитель грузоподъемности. Груз 12 установлен на опоры 16.
Транспортное средство работает следующим образом.
5
С пультов управления подают си- -ал на магнитные пускатели двигателей -; ч 5 и перемещают тележки 1 и 2 устройства под груз 12, установленный на опорах 16, высота которых превыщает высоту тележек 1, 2.
Перемещение каждой тележки осуществляют до тех пор, пока намеченная точка подвеса груза 12 не окажется в пределах опорного контура тележек 1, 2. Затем
o стропят груз 12 и, подав сигнал на магнитный пускатель, включают двигатель лебедки, которая поднимает его на высоту, достаточную для безопасного транспортирования без соприкосновения груза 12 с
тележкой 1, 2 при перемещении. После этого убирают опоры 16 и включением двигателей тележек и 2 начинают перемещение груза вдоль его продольной оси к месту установки. При необходимости поворот может осуществляться по двум вариан0 там, выбираемым в зввиснмостк от условий меремещения груза.
По iiepEOP-iy аариаь у сигнало.; г . управления отключают двигатели 14 и 15 тележек 1 и 2 и кратковременно останавливают устройство. Включением .пвигателей 4 и 15 передней тележки 1 в разные стороны производят ее поворот на нужный у|-ол, после чего аналогичным образом на тот же угол поворачивают fi заднюю тележку 2, Одновременным :уском двигателей 14 к 15
Q механизма пере;иН1же1И я в одну сторону перемещают уст;илктйо с грузом в необхо- zi,HMOM капраБлегпи;
11о BTOpiiwy нарианту также производят остановку усгройстза о.шовремснным отключением двигателей J4 и 1.5 и юворог перед5 ней тележк ; i на нужный угол Bpaiutiiiie.vi гусен 11 в противоположные стороны. Вк/цо- чив двигатели 14 и 15 задней тележки 2 в противоположные стороны, поворачивают ее на 90 и перемещают задний конец длинномерного груза до сов1мещения его продои
0 ной оси с про.аольной осью перед,11Й услеж- ки i. Затем заднюю 2 иоаора гиз - ют до. совмеицения ее ,льной оси с осью груза и, одновременно ьключив двигатели 14 и 15 тележек 1 и 2, продолжают транспор5 тирование в заданном направлении.
При включении двигателей 14 и 15 в разные стороны гусеницы дележки пойора- чкзаются на нужный угол вокруг вертикальной геометрической оси вращения. Так как ось гибкого грузонесущего элемента совпа0 дает с вертикальной осью вращения тележки, то несмотря на то, что опорная часть (рама 3) непоЕоротная, гоуз остается неподвижным. Это позволяе-1 маневрировг ъ передней и задней тележками и сохранять их устойчивость в связи в тем, что гибкий
5 подвес всегда остается внутри опорного контура.
После окончания транспортирования включением двигателя лебедки опускают
груз 12 на установленные под ним опоры 16 и производят расстроповку. Перемещение длинномерного крупногабаритного груза завершено.
Транслортйрованке груза при необходимости можно осуществлять .и в направлении, перпекдикулярнорл его продольной оси. При такой перевозке тележки располагают таким образом, чтобы их продоль- ные оси были перпендикулярны к продольной оси груза.
Формула изобретения
1. Транспортная система для перевозки длинномерного крупногабаритного груза.
содержащая ходовые тележки с приводными гусеничными движителями, каждая из которых снабжена опорной рамой со смонтированной на ней колонной с консолью, связанной с крюковой подвеской грузоподъ- .емного механизма, отличающаяся тем, что, с целью повыщения маневренности при транспортировке груза, вертикальная ось каждой крюковой подвески совмещена с гео- метр-зческой вертнкалы-ой осью поворота каждой тележки.
2. Система по п.1, отличающаяся тем, что опорная рама каждой смещена относительно указанной вертикальной геометрической оси к внещним KOHnain те- 5 лежек.
0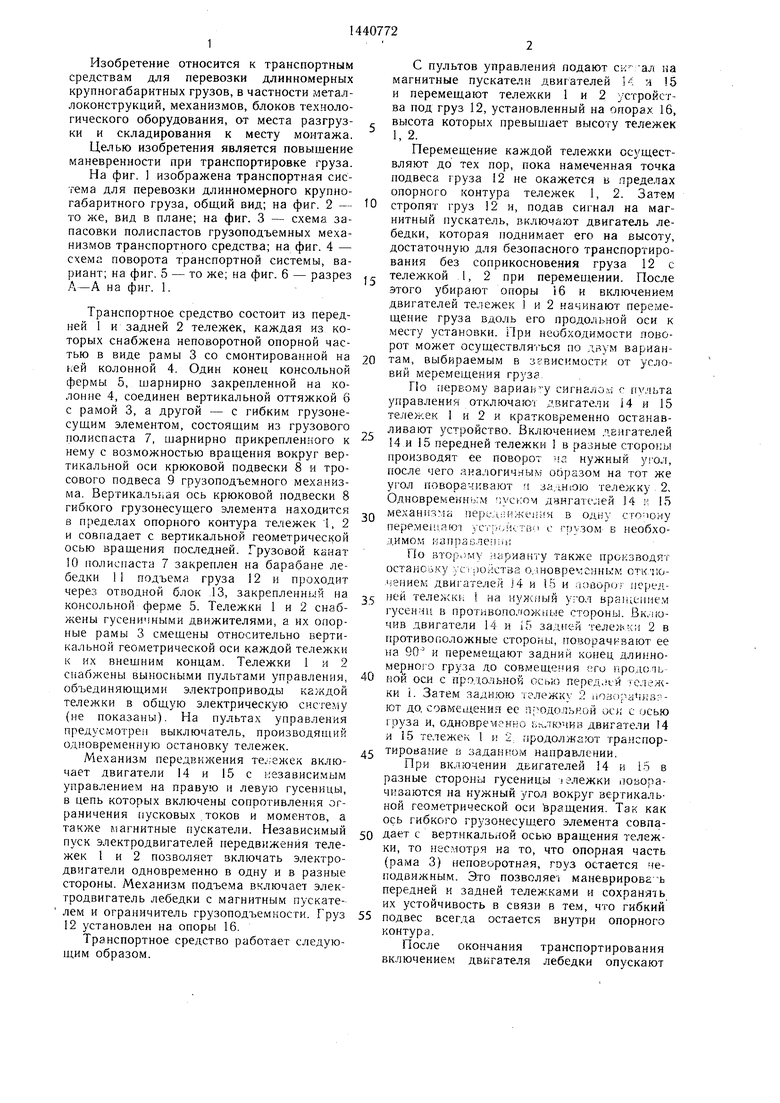
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для перевозкиКРупНОгАбАРиТНыХ ТяжЕлОВЕСНыХ гРузОВ | 1979 |
|
SU839777A1 |
| Сдвоенный кабельный кран | 1982 |
|
SU1057403A2 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| Сдвоенный кабельный кран | 1985 |
|
SU1301769A1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Двухзвенная гусеничная машина для перевозки длинномерных грузов | 1981 |
|
SU981065A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2099212C1 |
| Сдвоенный кабельный кран | 1976 |
|
SU583085A1 |
Изобретение относится к транспортным система.м для транспортировки длинмо- мерны.х грузов. Целью изобретения является повышение .маневренности при транспортировке груза. Транспортная система содержит тележки 1 и 2 с гусеничными движителями. Каждая тележка снабжена опор- нон рамой 3, смещенной относительно вертикальной геометрической оси к их внешним ,3iM. На раме 3 закре.тена ко- 4 с консольной грермой 5, связанной с крюковой асдвеской 8 грузоподъемного механизма. Вертикальная ось каждой крюкс- вой подвески 8 находится в опорном контуре каждой тележки и совпадает с верт;-,- кальной геометрической осью поворота пос ледней. 1 з.п.ф-лы, 6 ил. ье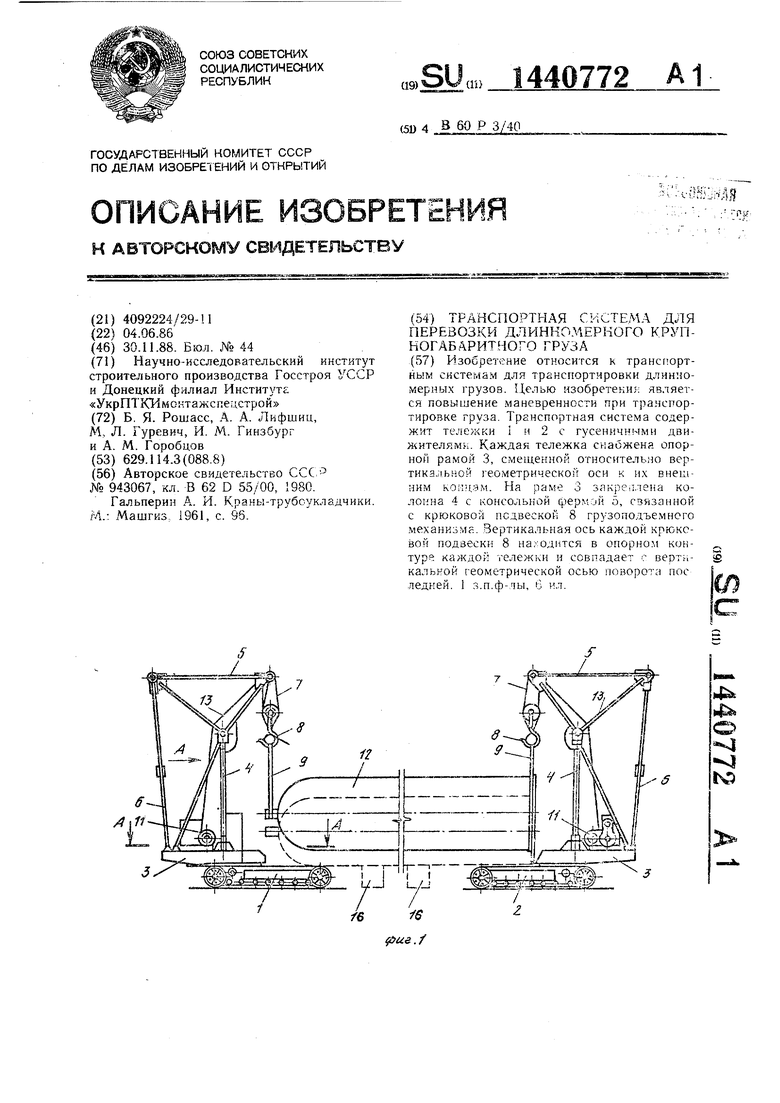
Ю
Pue.ff
ив.
iii Mk
tttrT Jiii-U-r
i Ьташ
LijToi f if-pff т iM i iilly/ft
J ,1 1 i
.
liilr
If
J
/5
Ось гибкого грузоне- эа&меята
Верти/(омная ось Ъращения
Фаг,6
| Гусеничная машина | 1980 |
|
SU943067A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Гальперин А | |||
| И | |||
| Краны-трубоукладчики | |||
| М.: Машгиз, 1961, с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
