fcS
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления стендом для испытания агрегатов трансмиссии транспортных средств | 1989 |
|
SU1677558A1 |
| Стенд для диагностирования технического состояния трансмиссии транспортных средств | 1985 |
|
SU1237939A1 |
| Стенд для диагностирования технического состояния трансмиссии транспортных средств | 1987 |
|
SU1460641A2 |
| Стенд для диагностирования технического состояния транспортных средств | 1988 |
|
SU1543280A1 |
| Стенд для диагностирования технического состояния транспортных средств | 1990 |
|
SU1744563A1 |
| Стенд для испытания трансмиссий транспортных средств | 1985 |
|
SU1325314A1 |
| Система управления стендом для испытания трансмиссий | 1985 |
|
SU1259127A2 |
| Стенд для исследования динамики механических коробок передач | 1990 |
|
SU1728705A1 |
| Способ определения технического состояния транспортного средства | 1989 |
|
SU1688150A1 |
| Стенд для диагностирования технического состояния трансмиссии транспортных средств | 1987 |
|
SU1416885A1 |
Изобретение относится к транспортному машиностроению и может быть использовано для испытаний трансмиссий на надежность. Цель изобретения - повышение точности воспроизведения эксплуатационных режимов нагружения. Приводной электродвигатель 1 соединен с входным валом 2 испытьшаемой трансмиссии 3, с выходным валом которой соединен тормоз 4 с блоком 5 управления . Имеется дополнительньй тормоз 7 с блоком 8 управления, выполненный порошкового типа. На выходном валу 6 испытываемой трансмиссии 3 формируется момент сопротивления, статическая составляющая которого создается тормозом 4, а динамическая составляющая - дополнительным тормозом 7. Раздельное формирование составляющих нагрузки на выходном валу 6 испытываемой трансмиссии 3 обес- печивает создание более высоких час- S тот колебаний нагрузки, что повышает точность воспроизведения эксплуатационных режимов нагружения. 1 ил. ICZT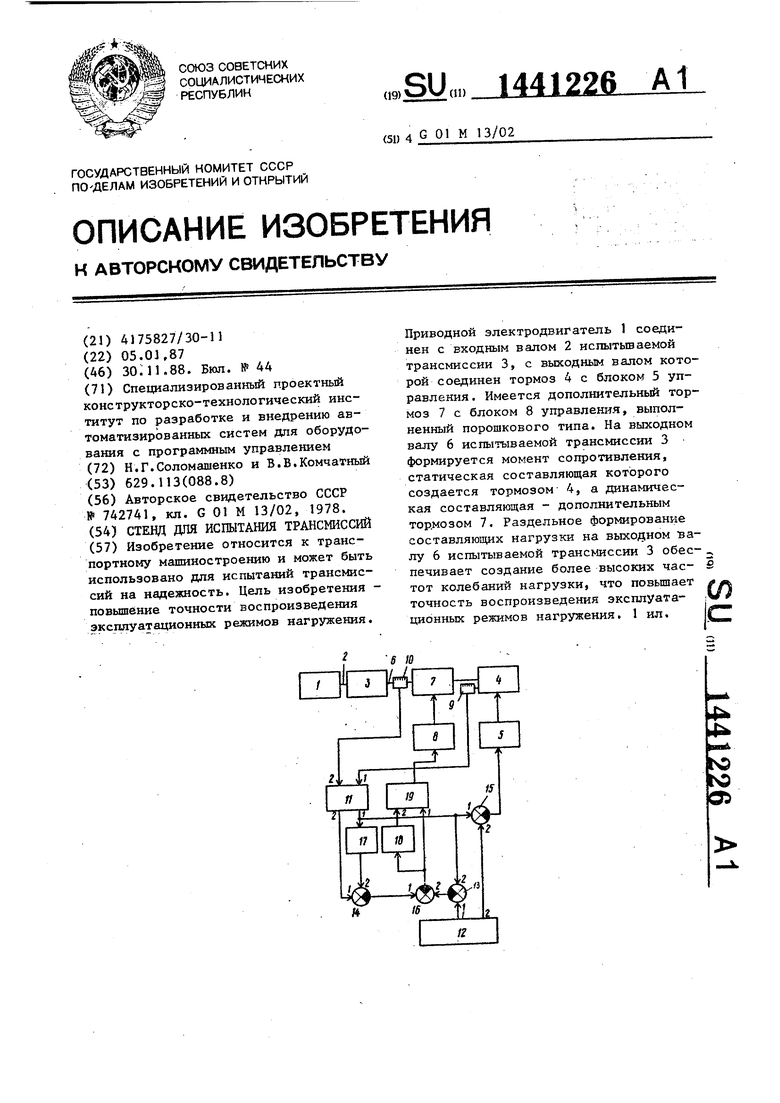
Изобретение относится к транспортному машиностроению и может быть использовано для испытаний трансмиссий на надежность,
Цель изобретения - повышение точности воспроизведения эксплуатационных режимов нагружения.
На чертеже изображена структурная схема стенда.
Стенд содержит приводной электродвигатель 1J кинематически соединенный с входным валом 2 испытываемой трансмиссии 3, тормоз 4 с блоком 5 управления, кинематически соединен- ньй с выходным валом 6 испытываемой трансмиссии и выполненный в виде электрического генератора, дополнительный тормоз 7, выполненный в виде порошкового тормоза с блоком 8 управления, кинематически соединенный с выходным валом 6 испытываемой транс- миссии и установленный между ней и тормозом 4, датчики- 9, 10 крутящего момента тормоза 4 и дополнительного тормоза 7, преобразователь 11 сигна- лов датчиков крутящего момента, первый вход которого соединен с выходом датчика 9 крутящего момента тормоза 4, второй вход - с выходом датчика 10 крутящего момента дополнительного тормоза 7, Стенд содержи таюке за- дающее устройство 12, первый блок 13 сравнения, первьй вход которого соединен с первым выходом задающего устройства 12, второй вход - с первым выходом преобразователя 11 сигналов датчиков крутящего момента, второй блок 4 сравнения, первый вход кото- рого соединен с вторым выходом преобразователя 11 сигналов датчиков крутящего момента, третий блок 15 сравнения, первый вход которого соединен с первым выходом преобразователя 11 сигналов датчиков крутящего момента, второй вход - с вторым выходом задающего устройства 12, а выход - с входом блока 5 управления тормозом, четвертый блок 16 сравнения первый вход которого соединен с выходом второго блока 14 сравнения, второй вход - с выходом первого блока 13 сравненияэ .блок 17 удвоения, вход которого соединен с первым выходом преобразовате ля 11 сигналов датчиков крутящего но мента, а выход - с вторым входом второго блока 14 сравнения. Дифференциатор 18, вход которого соединен с вы
O
5 0 5 д Q д
5
ходом четвертого блока 16 сравг ения, и сумматор 19, первый вход которого соединен с выходом, четвертого блока 16 сравнения, второй вход - с выходом дифференциатора 18, а выход - с входом блока 8 управления дополни-. телыаш тормозом,
Преобразователь 11 конструктивно состоит из двух идентичных и незави- СИ1-1ЫХ преобразователей сигналов датчиков S преобразующих поступающие по двум каналам измерения сигналы от датчиков 9 и 10.
Предлагаемый стенд работает следующим образом.
В соответствии с предаарительно сформированным резсимом работы с первого выхода задающего устройства 12 на первый вход первого блока 13 сравнения поступает сигнал, пропорциональный величине момента сопротивления,, создаваемого дополнЕт-ельным тормозом 7. На второй вкод первого блока 13 сравнения, на первый вход третьего блока 15 сравнения и блока 17 удвоения поступает Сигнал с первого выхода преобразователя 1 сигнале датчиков крутящего момента, пропорционалы-ый моменту сопротивления ториоза 4.. При выключенном приводном злактродвигйгеле 1 момент соп- ротивлания тормози 4 равен нулю. При
этом сигнал, пропорциональный моменту сопротивления дополнительного тормоза 7, с выхода первого блока 13 сравнения поступает ка второй вход четвертого блока 16 сравнения. На первый вход четвертого блока 16 сравнения вьжода второго блока 14 сравнения поступает сигнал, разньгй разности моментов сопротивления дополнительного тормоза 7 и тормоза 4. На первый вход второго блока J4 сравнения поступает сигнал с второго выхода преобразователя i1 сравнения датчиков крутящего момента., измеренньш датчиком 10 крутяшзго комен га, пропорциональный MOMeH i OB сопротивления тормоза 4 и дополните.пьного тормоза 7, а,на второй вход ,второго блока 4 сравнения поступаем сигнал с блока 27 уцваекия, равней удвоенному значению момента,сопротивления тормоза 4о В результате на выходах четвертого блока 16 сравне дая и сумматоре. 19 формируется сигнал, равный моменту сопротивления дополнительного тормоза 7j который поступает на
вход блока 8 управления дополнительным тормозом 7, Далее включается приводной электродвигатель 1, который начинает вращать входной вал 2 тываемой трансмиссии 3, при этом на выходном валу 6 посредством дополнительного тормоза 7 создается момент сопротивления, равный заданному.
Сигнал, пропорциональный моменту сопротивления дополнительного тормоза 7, с второго выхода преобразователя I1 сигналов датчиков крутящего момента поступает на первый вход второго блока 14 сравнения, с выхода Ко торого сигнал поступает на первый вход четвертого блока 16 сравнения. Сигнал с выхода четвертого блока 16 сравнения, равный разности заданного и отработанного значений крутящего момента на выходном валу 6 испытываемой трансмиссии 3, поступает на первый вход сумматора 19 и ка вход Дифференциатора 18. С выхода дифференциатора 18 сигнал, пропорционапьный производной от значения выходного сигнала четвертого блока 16 срйвне- ния, поступает на второй вход сумматора 19. После того, как фактическое значение момента сопротивления, созданного дополнителы ым тормозом 7, станет равным заданному, сигнал . на выходе сумматора 19 и, соответственно, на входе блока 8 управления дополнительным тормозом станет разным нулю. В результате на выходном валу 6 испытываемой трансмиссии 3 нагрузка будет равна моменту сопротивлеш я создаваемому дополнительным тормозом 7 в соответствии с сигналом на первом выходе задающего устройства 12, при этом имитируется режим трогания.
Далее в соответствии с предварительна сформированным нагрузочнь1М режимом с второго выхода задающего устройства 12 на второй вход третьего блока 15 сравнения поступает сиг- нал, пропорциональный моменту сспро- .тивления тормоза 4. С выхода третьего блока 15 сравнения сигнал поступает на вход блока 5 управления тормозом. Выходной сигнал датчика 9 крутящего момента тормоза поступает на первый вход преобразователя 11 сигналов датчиков крутящего момента, с первого выхода которого сигнал поступает на первый вход третьего блока 15 сравнения. Если значение сигнала на выходе третьего блока 15 сравне
0
0
5
ния равно нулю, то момент сопротивле- ния тормоза 4 будет равен заданному значению. Выходной сигнал датчика 10 крутящего момента пропорционален сумме моментов сопротивления, создаваемых дополнительным тормозом 7 и тормозом 4, поступает на второй вход преобразователя 11 сигналов датчиков крутящего момента. С второго выхода преобразователя 11 сигналов датчиков крутящего момента сигнал, пропорциональный крутящему моменту, измеряемому датчиком 10 крутящего момента, поступает на первый вход второго блока 14 сравнения, на второй вход которого с блока 17 удвоения поступает сигнал, пропорциональный моменту сопротивления тормоза 4. Б результате на выходе второго блока сравнения формируется сигнал, равньп разности моментов сопротивления дополкн гель- ного тормоза 7 и тормоза 4, который поступает на первый вход четвертого 5 блока 16 сравнения На второй вход четвертого блока 16 сравнения поступает сигнал с выхода первого блока 13 сравнешш. На вьжоде четвертого блока 16 сравнения формируется счг 0 нал, пропорциональный составляющей момента сопроп вления, создаваемого дойолнительным тормозом 7 который поступает на первый вход сумматора 19s где суммируется с cHrHajioM, про- 5 порцкональным производной от значения выходного снгнапа четвертого блока 16 сравнения, поступающим на второй вход сумматора 19 с выхода дифференциатора 18. Сигн.ал с выхода сумматора 19 поступает на вход блока 8 управления дополнительным тормозом.
Таким образомг на выходном валу 6 испытываемой трансмиссии 3 формируется момент сопротивления, статическая составляющая которого создается тор- мозом 4, а динамическая составляю- . щая - дополнительным тормозом 7
Раздельное формирование статнчес- кой и динамической составляющих наг- Q рузки на выходном валу 6 испытываемой трансмиссии 3 обеспечивает возможность создание более высоких час- тот колебаний нагрузки, что повышает точность воспроизведения эксплуатаци- 5 онных режимов нагружения.
Фо рмул-а изобретения
Стенд ДД1Я испытания трансмиссий, coдepжaпJ ш приводной двигатель, кине0
5
магически соединенный с входным валом испыт11щаемой трансмиссии, тормоз кинематически соединенный с выходным валом испытываемой трансмиссии, блок управления тормозом, датчик крутящего момента тормоза, преобразователь сигналов датчиков крутящего момента, первый вход которого соединен с выходом датчика крутящего момента тормо- за, задающее устройство, первый блок сравнения, первый вход которого соединен с первым выходом задающего устройства, второй и третий блоки сравнения, сумматор и дифференциатор, отличающийся тем, что, с целью повышения точности воспроизведения эксплуатационных режимов наг ружения, он снабжен дополнительным тормозом, кинематически соединенным с выходным валом испытываемой транс- миссии и установленным мегщу ней и тормозом, датчиком крутящего момента дополнительного тормоза, выход которого соединен с вторым входом преоб- разователя сигналов датчиков крутящеСоставитель С.Белоусько Редактор М.Келемеш Техред А.Кравчук Корректор А,Обручар
Заказ 6278/44
Тираж 847
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
го момента, блоком управления, дополнительным тормозом, вход которого соединен с выходом сумматора, блоком удвоения, вход которого соединен с первым выходом преобразователя сигналов датчиков крутящего момента, а выход - с вторым входом второго блока сравнения, четвертым блоком сравнения, первый вход которого соединен с выходом второго блока сравнения, второй вход - с выходом первого блока сравнения, а выход - с входом дифференциатора и первым входом сумматораj при этом второй выход преобразователя сигналов датчиков крутящего момента соединен с первым входом второго блока сравнения, первый выход - с первым входом третьего блока сравнения, и с вторым входом первого блока сравнения, выход дифференциатора соединен с вторым входом сумматора и второй выход задающего устройства соединен с вторым входом TjpeTbero блока сравнения, выход которого соединен с дом блока.управления тормозом.
Подписное
| Система управления стендом для испытания трансмиссий | 1978 |
|
SU742741A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
