Isd
fKfs.f
Изобретение относится к контрольно-измерительной технике и может быть использовано для настройки магнитных дефектоскопов-снарядов, контролирую- щих заглубленные трубопроводы, например, магистральные газопроводы.
Цель Изобретения - повышение точности настройки магнитного дефектоскопа-снаряда при контроле магистраль ных трубопроводов за счет формирования магнитных полей дефектов, прису- пщх магистральным трубопроводам.
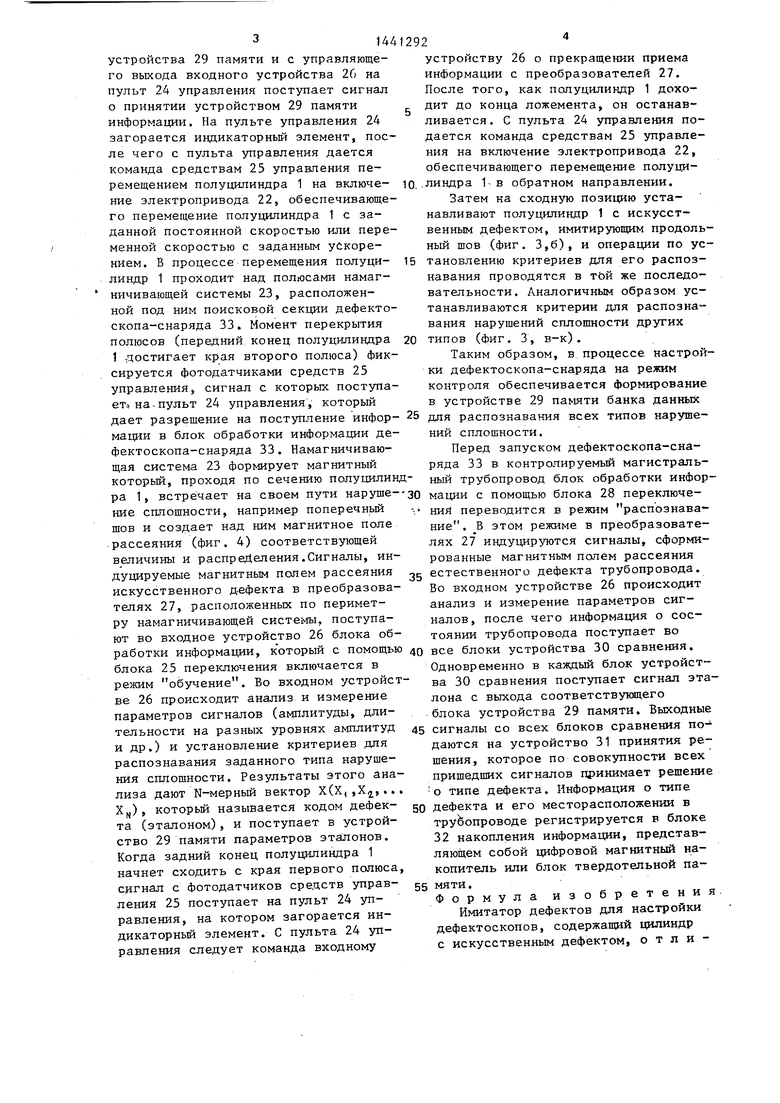
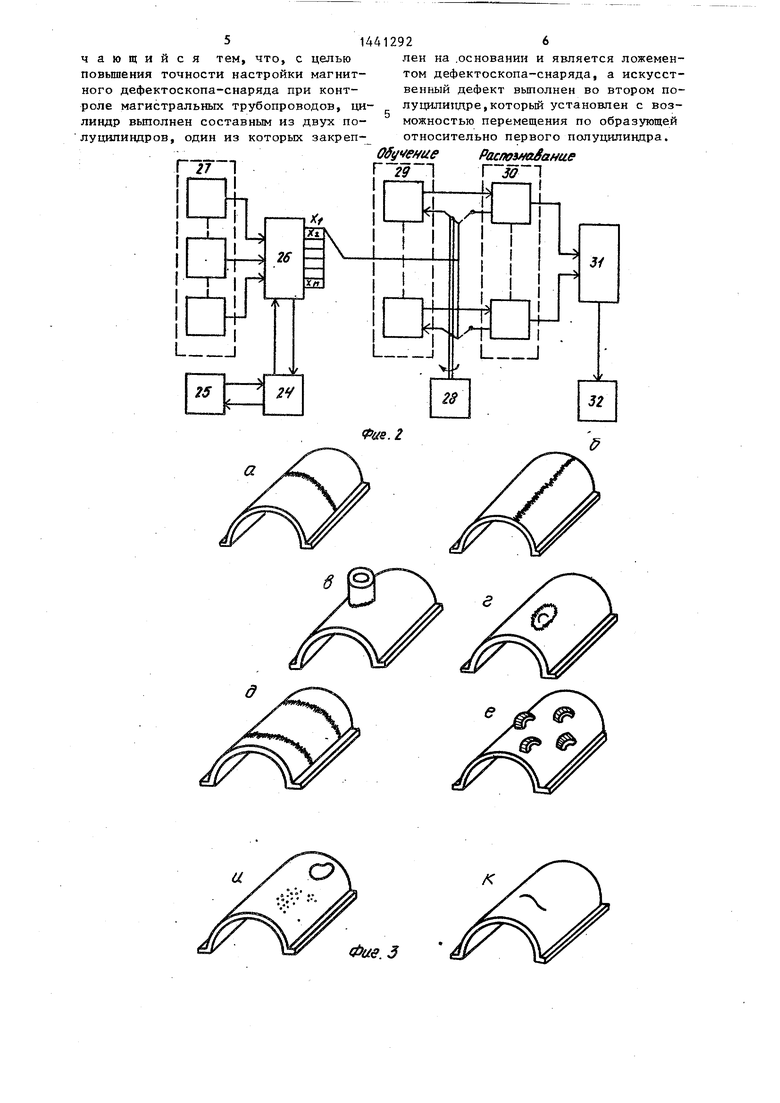
На фиг. 1 показан предлагаемьй имитатор дефектов для настройки-маг- нитного дефектоскопа-снаряда, схбрдай BKR-f на фиг. 2 - структурная схема управления имитатором, взаимодействующая с поисковой секцией и блоком обработки информации дефектоскопа-сна- ряда на фиг. 3 - подвижный полуцилиндр имитатора с искусственными нарушениями сплошности типа поперечный шов (а), продольньш шов (б), отвод (в) , технологическая заглзппка (г) , спиральный шов (д), маркерные магни- ты (е)э коррозионное пЪвреясдение и эрозионный износ (и) и пеперечная трещина (к); на фиг. 4 - топография . магнитного поля искусственного дефек- та.
Имитатор дефектов (фиг. 1) содержит подвижный полуцилиндр 1 с искусственным дефектом, устанавливаемый в нaпpaвляюшJix пазах полуцилиндра 2, закрепленного на железобетонном основании 3 и являющегося ложементом дефектоскопа-снаряда. На концах подвижного полуцилиндра 1 зафиксированы силовые дуги 4 и 5 для крепления тяну- щего троса 6. Силовое усилие троса обеспечивается с помощью опорных роликов 7-12 и натяжного ролика 13, установленных на соответствующих кронштейнах 14-20. Тяговое усилие тросу 6 задается приводным роликом 21, установленным на валу реверсивного электропривода 22. На фиг, 1 показана также намагничивающая система 23 поисковой секции дефектоскопа-снаряда.
Схема управления имитатором (фиг.2 содержит пульт 24 управления, построенный на ставдартньк элементах логики, первые вход и выход которого соединены со средствами 25 управле- ния перемещением подвижного полуци- линдра 1 , включакяцими электропривод 22 и элементы сигнализации о местонахождении полуцилиндра, например.фотодатчики. Вторые вход и выход пульта 24 управления 24 подключены соответственно к управляющим входу и выходу входного устройства 26 блока обработки информации дефектоскопа-снаряда. Входы входного устройства 26 соединены с преобразователями 27 поисковой секции дефектоскопа-сна ряда, а выход через блок переключения 28 подключен к входам блоков памяти устройства 29 памяти параметров эталонов (кодов дефектов).
Схема управления содержит также устройство 30 сравнения, первые входы блоков сравнения которого соединены с выходами соответствующих блоков памяти устройства 29 памяти параметров эталонов, вторые входы через блок 28 переключения подключены к выходу входного устройства 26, а выходы соединены со входами устройства 31 принятия решения, выход которого подключен к входу накопителя 32 информации.
HNmTaTop работает следующим образом.
Подвижный полуцилиндр 1 с выбранным искусственным дефектом, например поперечным швом (фиг. 3,а), устанавливается на конце полуцилиндра 2 (ложемента) , на среднюю часть которого помещается настриваемый дефектоскоп- снаряд 33. К силовым дугам 4 и 5, зафиксированным на концах подвижного полуцилиндра 1, крепится тянущий трос 6, посредством системы роликов 7-13 и 21 связанный с электроприводом 22, обеспечивающим возвратно-поступательное перемещение полуцилиндра 1 относительно полюсов намагничивающей системы 23 поисковой секции дефектоскопа-снаряда 33.
С пульта 24 управления на управляющий вход входного устройства 26 блока обработки информации дефектоскопа-снаряда 33 подается информация о типе дефекта, на который производится настройка, например о поперечном шве. Входное устройство 26 представляет собой усилительные и ключевые лсаскады, коммутатор и аналого-цифровой преобразователь и осуществляет предварительную обработку аналоговой информации и преобразование ее в цифровую форму. Полученная информация в виде закодированного адреса и условного обозначения типа дефекта поступает в один из блоков
14А129
устройства 29 памяти и с управляющего выхода входного устройства 26 на пульт 24 управления поступает сигнал
0принятии устройством 29 памяти информации. На пульте управления 24 загорается индикаторньй элемент, после чего с пульта управления дается команда средствам 25 управления перемещением полуцилиндра 1 на включе- ю.. ние электропривода 22, обеспечивающего перемещение полуцилиндра 1 с заданной постоянной скоростью или переменной скоростью с заданным ускорением. В процессе перемещения полуци- 15 линдр 1 проходит над полюсами намагничивающей системы 23, расположенной под ним поисковой секции дефектоскопа-снаряда 33. Момент перекрытия полюсов (передний конец полуцилиндра 20
1достигает края второго полюса) фиксируется фотодатчиками средств 25 управления, сигнал с которых поступа- етона-пульт 24 управления, который дает разрешение на поступление инфор- 25 мации в блок обработки информации дефектоскопа-снаряда 33. Намагничивающая система 23 формирует магнитный который, проходя по сечению полуцилиндра 1, встречает на своем пути наруше- зо ние сплошности, например поперечный
шов и создает над ним магнитное поле рассеяния (фиг. 4) соответствзгющей величины и распределения.Сигналы, индуцируемые магнитньм полем рассеяния .js искусственного дефекта в преобразователях 27, расположенных по периметру намагничивающей системы, поступают во входное устройство 26 блока обработки информации, который с помощью до блока 25 переключения включается в режим обучение. Во входном устройстве 26 происходит анализ и измерение параметров сигналов (амплитуды, длительности на разных уровнях амплитуд 45 и др.) и установление критериев для распознавания заданного типа нарушения сплошности. Результаты этого анализа дают N-мерный вектор X(X,,Xj, ... ; Х), которьй называется кодом дефек- 50 та (эталоном), и поступает в устройство 29 памяти параметров эталонов. Когда задний конец полуцилиндра 1 начнет сходить с края первого полюса, сигнал с фотодатчиков средств управ- 55 ления 25 поступает на пульт 24 управления, на котором загорается индикаторньй элемент. С пульта 24 управления следует команда входному
устройству 26 о прекращении приема информации с преобразователей 27. После того, как полуцилиндр 1 доходит до конца ложемента, он останавливается. С пульта 24 управления подается команда средствам 25 управления на включение электропривода 22, обеспечивающего перемещение полуцилиндра 1-в обратном направлении.
Затем на сходную позицию устанавливают полуцилиндр 1 с искусственным дефектом, имитирующим продольный шов (фиг. 3,6), и операции по установлению критериев для его распознавания проводятся в тЬй же последовательности. Аналогичным образом устанавливаются критерии для распознавания нарушений сплошности других типов (фиг. 3, в-к).
Таким образом, в процессе настройки дефектоскопа-снаряда на режим контроля обеспечивается формирование в устройстве 29 памяти банка данных для распознавания всех типов нарушений сплошности.
Перед запуском дефектоскопа-снаряда 33 в контролируемый магистральный трубопровод блок обработки информации с помощью блока 28 переключения переводится в режим распознавание. В этом режиме в преобразователях 27 индyщipyютcя сигналы, сформированные магнитным папем рассеяния естественного дефекта трубопровода. Во входном устройстве 26 происходит анализ и измерение параметров сигналов, после чего информация о состоянии трубопровода поступает во все блоки устройства 30 сравнения. Одновременно в каждый блок устройства 30 сравнения поступает сигнал эталона с выхода соответствукяцего блока устройства 29 памяти. Выходные сигналы со всех блоков сравнения по- даются на устройство 31 принятия решения, которое по совокупности всех пришедших сигналов принимает решение о типе дефекта. Информация о типе дефекта и его месторасположении в трубопроводе регистрируется в блоке 32 накоплений информации, представляющем собой цифровой магнитный накопитель или блок твердотельной памяти. Формула изобретения
Имитатор дефектов для настройки дефектоскопов, содержащий цилиндр с искусственным дефектом, о т л и а
f tfs.2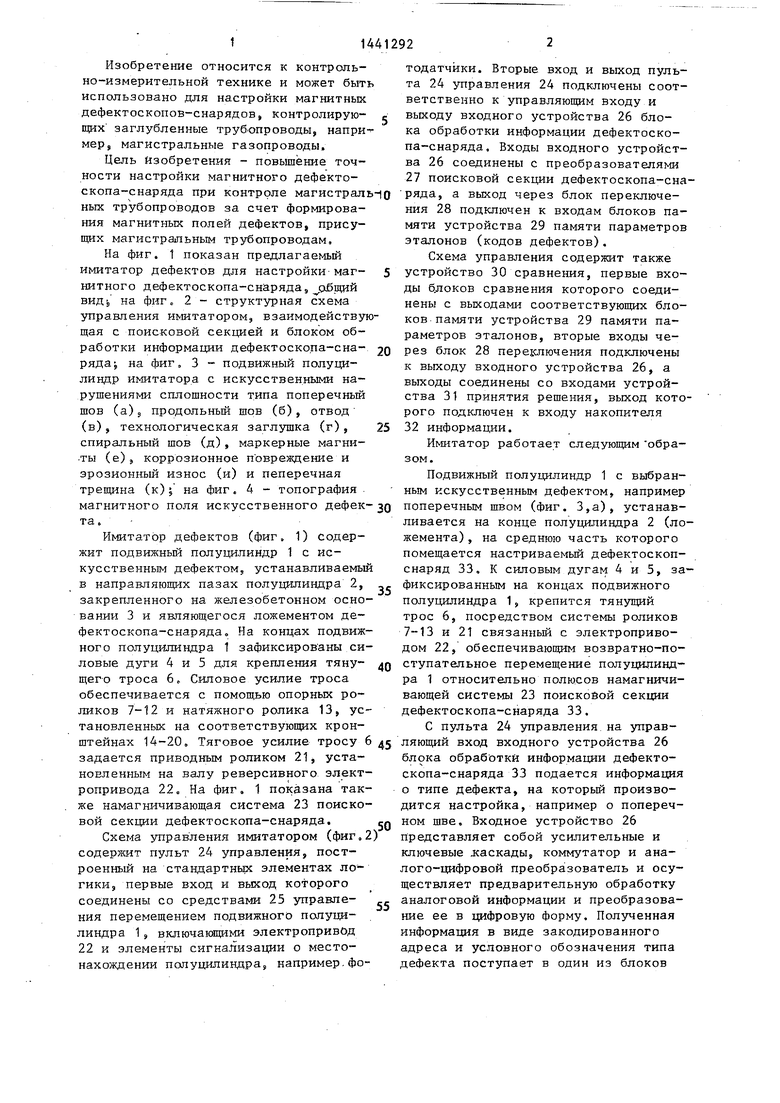
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ имитации дефектов при настройке магнитных проходных дефектоскопов | 1990 |
|
SU1716418A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2095804C1 |
| ИМИТАТОР СУЖЕНИЯ ПРОХОДА ТРУБОПРОВОДА | 2012 |
|
RU2532233C2 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышение точности настройки магнитного дефектоскопа-снаряда при контроле магистральнь1х трубопроводов. Имитатор дефектов содержит составной цилиндр из двух полуцилиндров 1 и 2, один из которых стационарно закреплен и является ложементом дефектоскопа-снаряда, а другой выполнен с возможностью перемещения относительно первого в продольном направлении, причем на поверхности подвижного полуцилиндра нанесен искусственный дефект, отражающий особенности естественного дефекта. В рабочем положении подвижный папуцилиндр .1 с искусственным дефектом устанавливается в направляющих пазах полуцилиндра 2 (ложемента), закрепленного на железобетонном основании 3. На концах подвижного полуцилиндра 1 зафиксированы силовые дуги 4 и 5 для крепления тянущего троса 6. Тяговое усилие тросу 6 задается приводным роликом 21, установленным на валу реверсивного электропривода 22. Перемещение полуцилиндра 1 относительно полюсов намагничивающей системы 23 поисковой секции дефектоскопа-снаряда, установленного на ложемент, производится с постоянной скоростью или переменной с заданным ускорением. ИмИ татор формирует банк данных о типах искусственных дефектов, их особенностях и размерах. 4 ил. S сл
а
к
Физ.З
| Имитатор дефектов | 1980 |
|
SU911309A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
