Изобретение относится к контрольно- измерительной технике и может быть использовано для настройки магнитных дефектоскопов-снарядов, контролирующих заглубленные трубопроводы, например магистральные газопроводы.
Известен способ получения информации о дефектах в магнитном неразрушающем контроле с использованием образца контролируемого объекта с нанесением на него искусственных дефектов и возбуждением постоянного магнитного поля в зоне дефекта, в котором для имитации полей дефектов для настройки магнитных дефектоскопов-снарядов,использующих индукционный съем информации, магнитное поле в зоне дефекта возбуждают цилиндрической системой намагничивания
дефектоскопа-снаряда с одновременным перемещением образца трубы относительно дефектоскопа.
Имитатор, реализующий этот способ имитации дефектов, представляет собой цилиндрический образец объекта контроля, составленный из двух полуцилиндров, один из которых закреплен на основании и служит ложементом для дефектоскопа-снаряда, другой полуцилиндр с нанесенными искусственными дефектами установлен в направляющих пазах ложемента и перемещается электроприводом троса и системы блоков.
Наиболее близким к предлагаемому является способ имитации дефектов в магнитном неразрушающем контроле, в котором образцы объекта контроля заменены на циО
N
00
линдрические кольца, составленные из нескольких концентрических колец, из которых по крайней мере одно имеет сквозную прорезь вдоль образующей, а магнитное поле создается током, в тороидальной секционной обмотке. Этот способ имитации дефектов пригоден для настройки магнитных дефектоскопов со сканированием преобразователей вращением вокруг оси дефектоскопа.
Однако этот способ характеризуется несоответствием полей рассеяния искусственных и естественных дефектов и как следствие - недостаточной точностью настройки дефектоскопа. Кроме того, трудоемкость технологического процесса выполнения искусственных дефектов не позволяют воспроизводить с достаточной точностью их параметры при повторном изготовлении.
Целью изобретения является повышение точности при настройке дефектоскопов с неподвижно закрепленными преобразователями путем осуществления максимально возможной индуктивной связи катушек.
Для имитации магнитных полей рассеяния дефектов используются секционные обмотки, индуктивно связанные с индикаторными обмотками преобразователей дефектоскопа. При этом максимальный коэффициент связи катушек близок к единице.
Секционные обмотки подключены к выходу электронного блока формирования ЭДС, создающего в обмотке магнитный поток, отражающий особенности тангенциальной составляющей магнитных полей рассеяния дефектов.
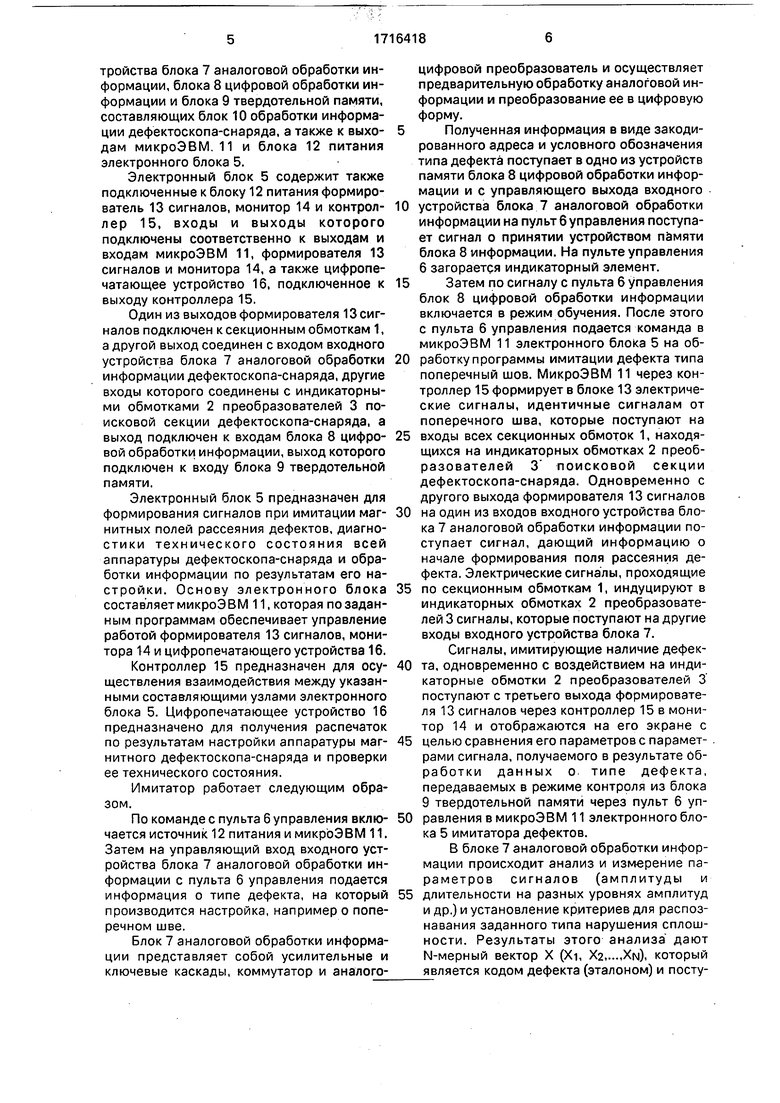
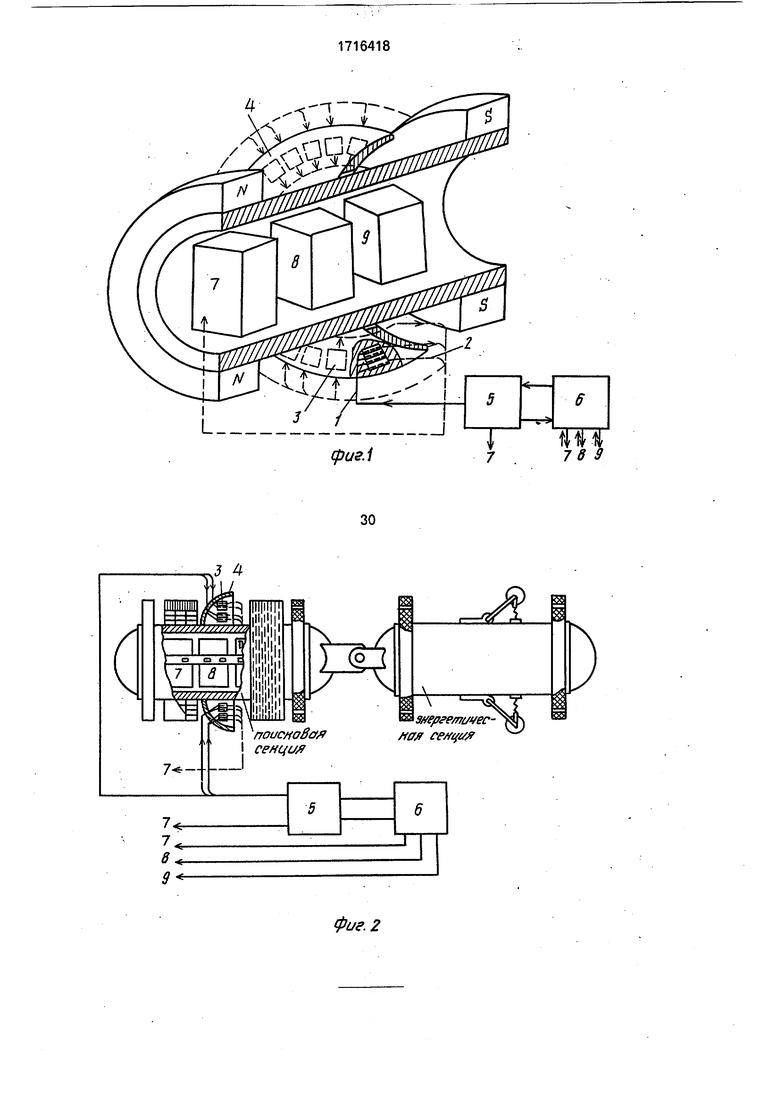
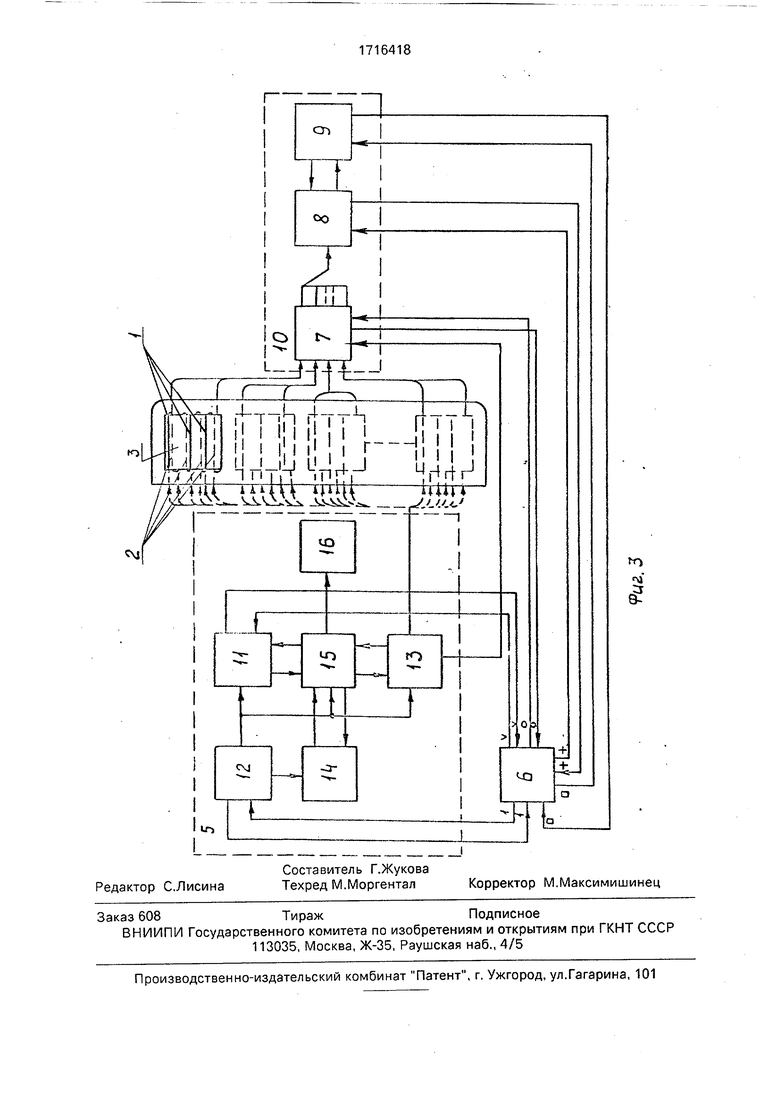
На фиг. 1 представлено устройство, реализующее способ имитации дефектов в со- ставе поисковой секции магнитного дефектоскопа-снаряда; на фиг. 2-имитатор дефектов в составе дефектоскопа-снаряда; на фиг. 3 - структурная схема аппаратуры управления имитатором дефектов, реализующая способ имитации магнитных полей рассеяния проходных дефектоскопов (например дефекты трубопроводов).
Индукционный преобразователь воспринимает скорость изменения тангенциальной составляющей индукции напряженности поля дефекта
d Вт„ ь d Нт
e w TScos0
где в - угол между осью катушки и вектором;
- магнитная проницаемость тела сердечника.
Измерительная обмотка индукционного преобразователя реагирует на скорость
изменения магнитного потока, охватываемого катушкой.
В процессе имитации потока, возникающего в сердечнике катушки, как бы при ее
5 прохождении над дефектом, достаточно возбудить этот поток имитирующей обмоткой, скорость изменения которого будет задана частотными характеристиками тока возбуждения, а амплитуда - величиной тока.
0 При этом групповые скопления дефектов моделируются дополнительным модулирующим сигналом заданной амплитуды и частоты.
Секционная обмотка, формирующая
5 эталонный магнитный поток, выполнена на измерительной, соосно с ней для обеспечения совпадения их магнитных осей и достижения максимального коэффициента связи катушек.
0 Сканирование внутренней поверхности трубопровода осуществляется преобразователями, размещенными по окружности и образующими кольцо с накладными катушками, оси которых параллельны оси трубы.
5 Это кольцо перемещается вдоль трубопровода.
В процессе контроля трубопровода дефектоскоп-снаряд движется со скоростью от 1 до 10 м/с.
0 Съем информации преобразователя осуществляется через каждые 3 см вдоль образующей трубопровода, что по времени соответствует30 м/с при скорости снаряда 1 м/с. За этот период времени подаются сиг5 налы на все 128 обмоток имитации сигнала. Моделирование полей дефектов типа коррозионных повреждений заданной площади осуществляется ЭВМ, в памяти которой хранятся все модели дефекта,
0 отображаемые индукционным преобразователем в заданном диапазоне скорости сканирования поверхности объекта контроля.
Моделирование полей дефектов тру5 бопровода осуществляется поступлением сигнала на группу из N секционных обмоток на заданный интервал времени.
Имитатор дефектов содержит секционные обмотки 1, расположенные на индика0 торных обмотках 2 преобразователей 3 поисковой секции магнитного дефектоскопа-снаряда, равномерно установленных по окружности и образующих измерительное кольцо 4, электронный блок 5 формирова5 ния магнитных полей рассеяния, отражающих особенности естественных дефектов, и пульт 6 управления, построенный на стандартных элементах логики, входы и выходы которого подключены соответственно к выходам и управляющим входам входного устройства блока 7 аналоговой обработки информации, блока 8 цифровой обработки информации и блока 9 твердотельной памяти, составляющих блок 10 обработки информации дефектоскопа-снаряда, а также к выходам микроЭВМ. 11 и блока 12 питания электронного блока 5.
Электронный блок 5 содержит также подключенные к блоку 12 питания формирователь 13 сигналов, монитор 14 и контроллер 15, входы и выходы которого подключены соответственно к выходам и входам микроЭВМ 11, формирователя 13 сигналов и монитора 14, а также цифропе- чатающее устройство 16, подключенное к выходу контроллера 15.
Один из выходов формирователя 13 сигналов подключен к секционным обмоткам 1, а другой выход соединен с входом входного устройства блока 7 аналоговой обработки информации дефектоскопа-снаряда, другие входы которого соединены с индикаторными обмотками 2 преобразователей 3 поисковой секции дефектоскопа-снаряда, а выход подключен к входам блока 8 цифровой обработки информации, выход которого подключен к входу блока 9 твердотельной памяти.
Электронный блок 5 предназначен для формирования сигналов при имитации магнитных полей рассеяния дефектов, диагностики технического состояния всей аппаратуры дефектоскопа-снаряда и обработки информации по результатам его настройки. Основу электронного блока составляет микроЭ ВМ 11, которая по заданным программам обеспечивает управление работой формирователя 13 сигналов, монитора 14 и цифропечатающего устройства 16.
Контроллер 15 предназначен для осуществления взаимодействия между указанными составляющими узлами электронного блока 5. Цифропечатающее устройство 16 предназначено для получения распечаток по результатам настройки аппаратуры магнитного дефектоскопа-снаряда и проверки ее технического состояния.
Имитатор работает следующим образом.
По команде с пульта 6 управления включается источник 12 питания и микроЭВМ 11. Затем на управляющий вход входного устройства блока 7 аналоговой обработки информации с пульта 6 управления подается информация о типе дефекта, на который производится настройка, например о поперечном шве.
Блок 7 аналоговой обработки информации представляет собой усилительные и ключевые каскады, коммутатор и аналогоцифровой преобразователь и осуществляет предварительную обработку аналоговой информации и преобразование ее в цифровую форму.
Полученная информация в виде закодированного адреса и условного обозначения типа дефекта поступает в одно из устройств памяти блока 8 цифровой обработки информации и с управляющего выхода входного
0 устройства блока.7 аналоговой обработки информации на пульт 6 управления поступает сигнал о принятии устройством памяти блока 8 информации. На пульте управления 6 загорается индикаторный элемент.
5 Затем по сигналу с пульта 6 управления блок 8 цифровой обработки информации включается в режим обучения. После этого с пульта 6 управления подается команда в микроЭВМ 11 электронного блока 5 на об0 работку программы имитации дефекта типа поперечный шов. МикроЭВМ 11 через контроллер 15 формирует в блоке 13 электрические сигналы, идентичные сигналам от поперечного шва, которые поступают на
5 входы всех секционных обмоток 1, находящихся на индикаторных обмотках 2 преобразователей 3 поисковой секции дефектоскопа-снаряда. Одновременно с другого выхода формирователя 13 сигналов
0 на один из входов входного устройства блока 7 аналоговой обработки информации поступает сигнал, дающий информацию о начале формирования поля рассеяния дефекта. Электрические сигналы, проходящие
5 по секционным обмоткам 1, индуцируют в индикаторных обмотках 2 преобразователей 3 сигналы, которые поступают на другие входы входного устройства блока 7.
Сигналы, имитирующие наличие дефек0 та, одновременно с воздействием на индикаторные обмотки 2 преобразователей 3 поступают с третьего выхода формирователя 13 сигналов через контроллер 15 в монитор 14 и отображаются на его экране с
5 целью сравнения его параметров с параметрами сигнала, получаемого в результате Обработки данных о типе дефекта, передаваемых в режиме контроля из блока 9 твердотельной памяти через пульт 6 уп0 равления в микроЭВМ 11 электронного блока 5 имитатора дефектов.
В блоке 7 аналоговой обработки информации происходит анализ и измерение параметров сигналов (амплитуды и
5 длительности на разных уровнях амплитуд и др.) и установление критериев для распознавания заданного типа нарушения сплошности. Результаты этого анализа дают
N-мерный вектор X (Xi, XaXN), который
является кодом дефекта (эталоном) и поступает в блок 8 цифровой обработки информации.
Затем данные о коде дефекта из блока 8 цифровой обработки информации в цифровой форме поступают в блок 9 твердотельной памяти, откуда данные о типе дефекта по сигналу с пульта 6 поступают в микро- ЭВМ 11, где преобразуются в сигнал, который через контроллер 15 поступает в монитор 14 и отображается на его экране для проверки правильности процесса формирования эталона дефекта. Полученное изображение сигнала должно совпадать с исходным сигналом.
После этого с управляющего выхода входного устройства блока 7 аналоговой обработки информации на пульт 6 управления поступает сигнал об окончании процесса обработки информации.
Затем на управляющий вход входного устройства блока 7 аналоговой обработки информации с пульта 6 управления подается информация о другом типе дефекта и операции по устранению критериев дефекта для его распознавания проводятся в той же последовательности. Аналогичным образом проводятся операции по установлению критериев для распознавания нарушений сплошности других типов дефектов.
Таким образом, в процессе настройки дефектоскопа-снаряда на режим контроля обеспечивается формирование в устройстве памяти блока 8 цифровой обработки банка данных для распознавания всех типов дефектов.
После завершения формирования банка данных об эталонных дефектах проводится проверка его достоверности. Для этого по команде с пульта 6 управления блок 8 цифровой обработки информации переводится в режим распознавания, а в микро- ЭВМ 11 подается команда на отработку программы имитации режима контроля трубопровода заданной протяженности, при определенной скорости. При этом микро- ЭВМ 1 1 через формирователь 13 импульсов формирует в определенной последовательности поля дефектов, подлежащих обнаружению и распознаванию. В процессе имитации пробега после аналоговой и цифровой обработки информация о дефектах поступает в блок 9 твердотельной памяти.
После завершения имитации режима контроля трубопровода микроЭВМ 11 по команде с пульта 6 управления переводят в режим распознавания дефектов в процессе имитации режима контроля трубопровода. При этом данные о результатах распознавания с выхода блока 9 твердотельной памяти через пульт 6 управления поступают в мик- роЭВМ 11. Результаты анализа информации выводятся на цифропечатающее устройство 16, которое выдает протокол испытаний (распечатку). По полученным данным распечатки делают заключение о качестве настройки магнитного дефектоскопа-снаряда на распознавание и оценку степени опасности дефектов, а также
осуществляют техническую диагностику его аппаратуры.
Предлагаемый способ имитации дефектов в отличие от прототипа предназначен для метрологического обеспечения многоканальных дефектоскопов-снарядов, применяемых для контроля заглубленных трубопроводов. Имитатор обеспечивает дефектоскопу-снаряду высокую точность настройки и последующую ее контрольную
проверку. Это, в свою очередь, позволяет повысить достоверность распознавания дефектов и объективно оценить техническое состояние магистральных газопроводов, что достигается путем формирования секционными обмотками топографии магнитных полей рассеяния дефектов, близкой ктопо- графии полей естественных дефектов. При этом процесс настройки не требует специализированных стендов и может осуществляться в любых условиях.
Формула изобретения
Способ имитации дефектов при настройке магнитных проходных дефектоскопов, заключающийся в том, что возбуждают секционные обмотки и индуктивно связывают их с индикаторными обмотками преобразователей магнитных проходных
дефектоскопов, по сигналам которых судят о параметрах дефектов, отличающийся тем, что, с целью повышения точности при настройке дефектоскопов с неподвижно закрепленными преобразователями путем
осуществления максимально возможной индуктивной связи катушек, секционные обмотки располагают на индикаторных обмотках преобразователей магнитных проходных дефектоскопов соосно с ними.
Л
1Г
VI


| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор дефектов для настройки дефектоскопов | 1987 |
|
SU1441292A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 2006 |
|
RU2324195C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 1998 |
|
RU2144182C1 |
| Устройство для определения места дефекта трубопровода | 1989 |
|
SU1770750A1 |
| Имитатор дефектов | 1980 |
|
SU911309A1 |
| УСТРОЙСТВО МАГНИТНОГО ДЕФЕКТОСКОПА И СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ТРУБОПРОВОДА МАГНИТНЫМИ ДЕФЕКТОСКОПАМИ | 2014 |
|
RU2586261C2 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| Портативный электромагнитный сканер-дефектоскоп для неразрушающего контроля бурильных труб | 2019 |
|
RU2727559C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для настройки магнитных дефектоскопов-снарядов, контролирующих заглубленные трубопроводы, например магистральные газопроводы. Цель изобретения - повышение точности при настройке дефектоскопов с неподвижно закрепленными преобразователями за счет осуществления максимально возможной индуктивной связи катушек. Секционные обмотки возбуждают и располагают соосно с индикатор- ными обмотками преобразователей магнитных проходных дефектоскопов, по сигналам которых судят о параметрах дефектов, а точность настройки дефектоскопов с неподвижно закрепленными преобразователями достигается за счет осуществления максимально возможной индуктивной связи секционных и индикаторных обмоток, а также формированием тока возбуждения с использованием амплитудной и частотной модуляции сигнала, 3 ил. (Л
L.
фиг А
I поисковая сенция
Фиг. 2
НТ 78 9
т
-Л
т
И 9//epepfft{/vec- ноя ce/fqt&r
S3
ОЖ1
/ЛИ
Н ilj U j.J inj-f MI ft
VvV VvvOvV
ттт
г-I I I г III
Irlid
ЬгПгг- LV.4
м
г
| Имитатор дефектов | 1980 |
|
SU911309A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Имитатор дефектов для настройки дефектоскопов | 1987 |
|
SU1441292A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
