7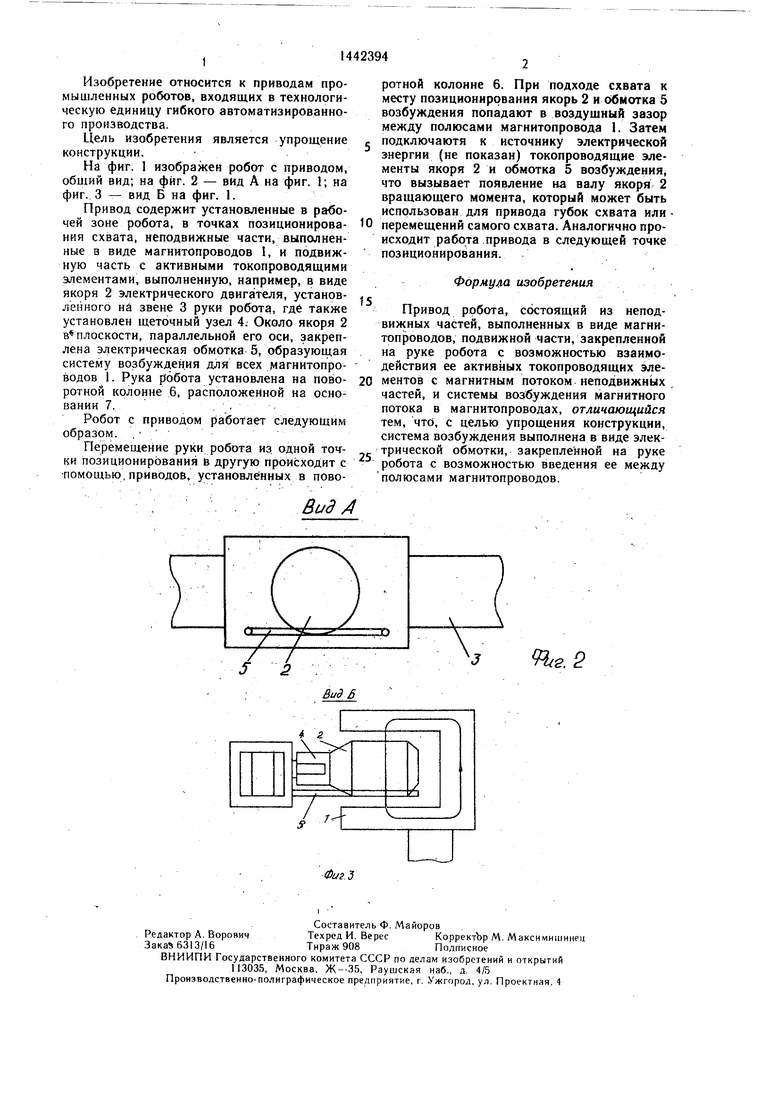
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
Изобретение относится к приводам промышленных роботов, входящих в технологическую единицу гибкого автоматизированного производства. Целью изобретения является упрощение конструкции. При перемещении руки робота из одной точки позиционирования в другую с помощью приводов, расположенных в поворотной колонне 6, происходит перемещение якоря 2 и обмотки возбуждения 5 из воздушного зазора одного из магнитопроводов 1 в другой, после чего подается напряжение на обмотку возбуждения 5 и якорь 2. 3 ил.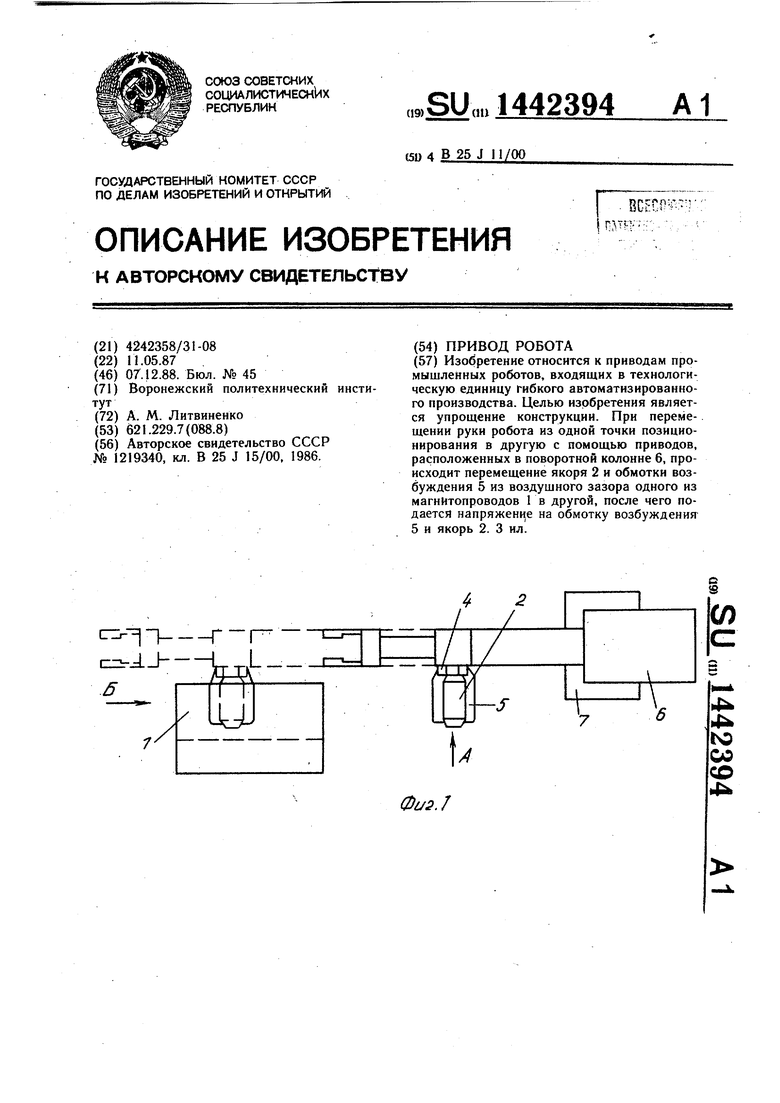
0L/2J
Изобретение относится к приводам промышленных роботов, входящих в технологическую единицу гибкого автоматизированного производства.
Цель изобретения является упрощение конструкции.
На фиг. 1 изображен робот с приводом, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Привод содержит установленные в рабочей зоне робота, в точках позиционирования схвата, неподвижные части, выполненные в виде магнитопроводов 1, и подвижную часть с активными токопроводящими элементами, выполненную, например, в виде якоря 2 электрического двигателя, установленного ни звене 3 руки робота, где также установлен щеточный узел 4: Около якоря 2 в плоскости, параллельной его оси, закреплена э.л1ектрическая обмотка 5, образующая систему возбуждения для всех магнитопроводов I. Рука робота устаиовлена на поворотной колонне 6, расположенной на основании 7. . ,
Робот с приводом работает следующим образом. .
Перемещение руки робота из. одной точг- ки позиционирования в другую происходит с помощью, приводов, установленных в повоВид
/
/ /
/т
ротной колонне 6. При подходе схвата к месту позиционировання якорь 2 и ббмотка 5 возбуждения попадают в воздушный зазор между полюсами магнитопровода . Затем
подключаютя к источнику электрической энергии (не показан) токопроводящне элементы якоря 2 и обмотка 5 возбуждения, что вызывает появление ка эалу якоря 2 вращающего момента, который может быть использован для привода губок схвата или
перемещений самого схвата. Аналогично происходит работа привода в следующей точке позиционирования.
Формула изобретения
Привод робота, состоящий из неподвижных частей, выполненных в виде магнитопроводов, подвижной части, закрепленной на руке робота с возможностью взаимодействия ее активных токопроводящих эле- ментов с магннтным потоком неподвижных частей, и системы возбуждения магнитного потока в магнитопроводах, отличающийся тем, что, с целью упрощения конструкции, система возбуждения выполнена в виде электрической обмотки, закрепленной на руке робота с возможностью введения ее между полюсами магнитопроводов.
„;зэ
ч
%г.2
| Схват манипулятора | 1984 |
|
SU1219340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
