Изобретение относится к электромеханическим манипуляторам промышленных роботов, преимущественно выполненным с внешними магнитными системами.
Приводы с внешними магнитными системами описаны, например, в [1]. Использование внешних магнитных систем различных типов дает возможность резкого уменьшения массогабаритных показателей электромеханического привода манипуляторов промышленных роботов. Это достигается за счет того, что элементы с наибольшей массой - магнитные системы - располагаются на неподвижно закрепленных основаниях, а активные токопроводящие элементы (обмотки или якори), укрепленные на руке манипулятора, входят в зазор внешних магнитных систем при позиционировании. Данный принцип особенно эффективен для приводов схватов и ориентирующих степеней подвижности роботов. Недостатком такого манипулятора является низкий коэффициент сервиса и повышенная сложность, вызванная наличием большого числа торцевых матричных электромагнитных элементов.
Наиболее близким к заявляемому по совокупности существенных признаков является промышленный робот, который содержит две магнитные системы - внутреннюю и внешнюю, каждая из которых представляет собой С-образный магнитопровод [2].
Недостатком данного робота является его приспособленность лишь к электроприводам постоянного тока, к тому же только двухполюсного исполнения (по числу индукторов). В приводах торцевого типа С-образные магнитопроводы не применяются, поскольку замыкание магнитного потока осуществляется в пределах окружности торцевого статора, а ферромагнитные массы имеются на роторе. Применение же нескольких кольцеобразных статоров приводит к тому, что лобовые части их занимают полезное пространство зоны возбуждения роторов, что приводит к уменьшению вращающегося момента.
Изобретение направлено на повышение надежности и упрощение конструкции путем обеспечения применения бесконтактного электропривода переменного тока.
Это достигается тем, что промышленный робот, содержащий руку с приводами и охватом, основание и внешние магнитные системы, выполнен с горизонтально-ангуальной системой координат, дополнительно содержит привод подъема, при этом рука выполнена шарнирной, внешние магнитные системы выполнены в виде последовательно расположенных рядов, причем каждая предыдущая внешняя магнитная система выполнена с продольным пазом, в котором расположены валы роторов каждой последующей магнитной системы.
Достижение технического результата - повышение надежности и упрощение конструкции - достигается за счет увеличения числа активных зон при обеспечении компактности расположения блока роторов и внешних магнитных систем.
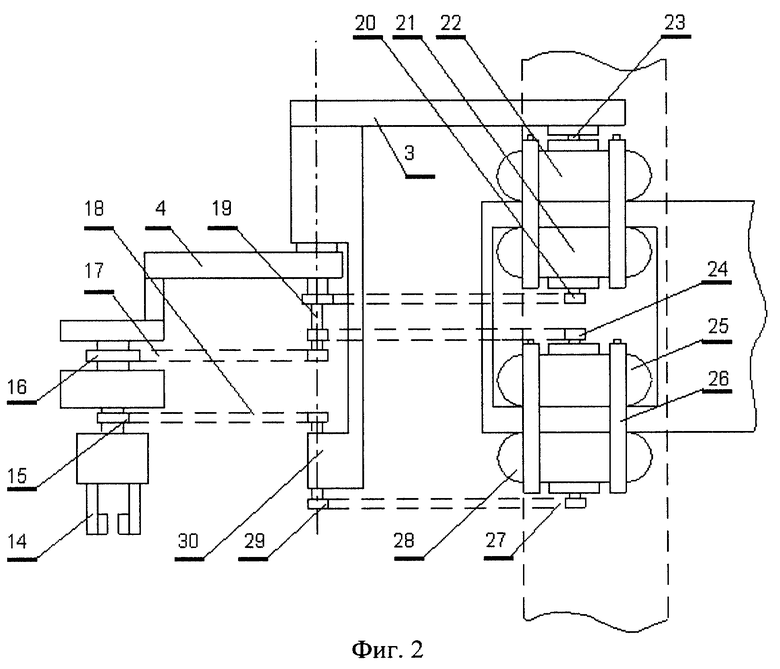
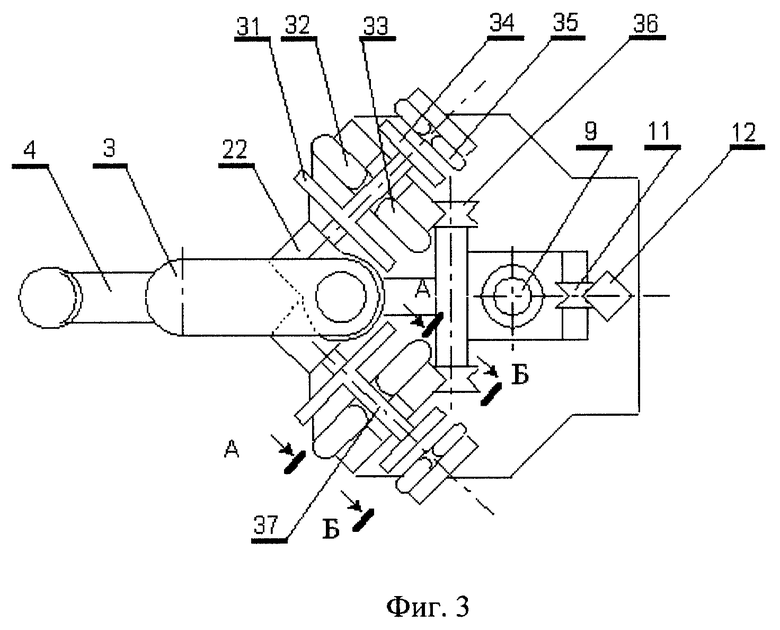
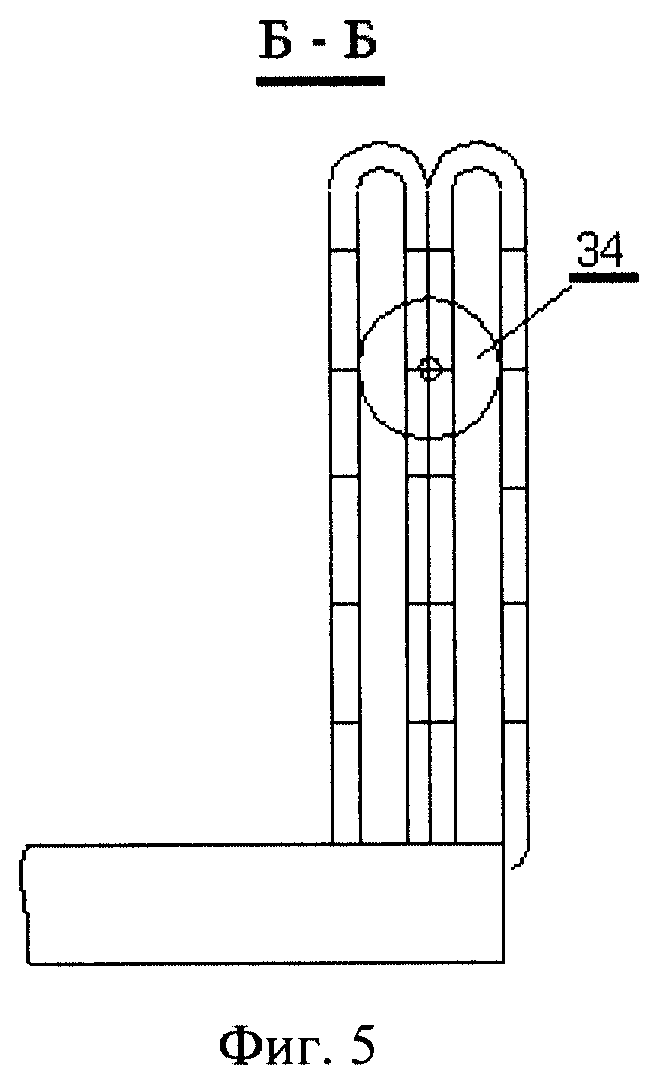
Сущность изобретения иллюстрируется чертежами, где на фиг.1 изображен заявленный промышленный робот, вид сбоку, на фиг.2 представлен боковой разрез каретки с блоком приводов и магнитными системами в увеличенном масштабе, на фиг.3 показан вид сверху со снятой замыкающей перемычкой, на фиг.4 - вид спереди предыдущей (взаимодействующей с ротором с коротким валом магнитной системы), на фиг.5 - вид спереди последующей (взаимодействующей с ротором с длинным валом магнитной системы).
Робот включает в себя основание 1, - нулевое звено кинематической цепи, на котором неподвижно укреплена предыдущая магнитная система 2, представляющая собой внешнее замыкающее ярмо с обмотками, каретку 3 - первое звено (плечо) - с блоком приводов с шарнирно прикрепленным к ней вторым звеном 4, несущим кисть и схват - см. фиг.2. К этому звену, в свою очередь шарнирно прикреплено третье звено, включающее блок ротации кисти 6 и схват 5. На основании 1 также укреплена последующая магнитная система 7, которая взаимодействует с роторами с длинными осями. Робот имеет также верхнюю замыкающую перемычку 8, ходовой винт 9, который охвачен гайкой 10, которая, в свою очередь, закреплена в подвижной каретке 13. Каретка снабжена роликом 11, перемещающимся по квадратной направляющей 12. Схват 5 имеет губки 14 и входной вал со звездочкой 15. Между валом и губками размещен параллелограммный механизм перемещения губок (на фиг.2 не показан). Блок ротации кисти снабжен звездочкой 16, которая через цепь 17 и промежуточный блок звездочек 19 соединена с редуктором 25. Звездочка 15 схвата вращается посредством цепи 18. Звено 4 (локоть) несет кисть 6 и схват 5 с губками 14 - см. фиг.2 и 3. Блок звездочек 19 установлен на оси, соединяющей звенья 3 и 4. Звено 4 вращается посредством звездочки, соединенной цепью с звездочкой 20 червячного редуктора 21. Червячный рeдyктop 22 имеет выходной вал 23, на котором укреплено звено 3. Редуктор 25 через звездочки 24 и 16 приводит во вращение блок ротации 6. Все редукторы установлены в окне каретки 13 с помощью стяжек 26. Редуктор 28 через звездочки 27 и 29 вращает промежуточный вал, установленный в приливе 30, который является частью звена 3. Далее движение передается на схват. На входных коротких валах двух редукторов установлены роторы 31, которые взаимодействуют с внешними магнитными системами 2. Каждая из них состоит из двух подсистем: 33 и 32 с продольным пазом. Последующий ряд внешних магнитных систем взаимодействует с роторами 34 с длинным валом, который располагается в пазу между подсистемами 32 и 33. Каждая из последующих магнитных систем 7 также имеет две подсистемы 35, которые установлены вплотную друг к другу без продольного паза. На каретке укреплена ось с роликами 36, которые взаимодействуют с углами магнитопроводов подсистемы 33, которые используются в качестве направляющих. Как показано на фиг.4, длинные валы 37 роторов 34 расположены в продольном пазу между подсистемами 32 и 33 предыдущей магнитной системы 2, при этом система 7 является последующей.
Робот функционирует следующим образом. Подъем каретки 13 с блоком приводов осуществляется приводом подъема, который установлен в основании 1 и вращает ходовой винт 9, взаимодействующий с гайкой 10. Поворот звена осуществляется следующим образом. Ротор 31 вращается посредством бегущего магнитного поля в линейных магнитных подсистемах 32 и 33, причем поля должны быть разнонаправлены. Ротор вращает входной вал (червяк) редуктора 22, на выходном валу 23 редуктора 22 укреплено звено 3. Звено 4 поворачивается посредством редуктора 21, на входном длинном валу которого укреплен ротор 34, взаимодействующий с подсистемой 35 последующей магнитной системы 7. Далее через звездочку 20 и цепь осуществляется поворот звена 4. Аналогично осуществляется привод ротации охвата - нижние магнитные системы - фиг.3. Так, ротор больших размеров, расположенный на коротком валу, осуществляет поворот звездочки 24 редуктора 25. Далее через цепи, промежуточный блок звездочек 19 и звездочку 16, осуществляется ротация схвата. Ротор, установленный на длинном валу, который проходит через продольный паз предыдущей магнитной системы, приводит во вращение выходной вал редуктора 28 со звездочкой 27, далее через звездочку 29, цепь 18, осуществляется поворот звездочки 15, установленной на входном валу привода схвата с параллелограммным механизмом перемещения губок.
К основным технико-экономическим преимуществам робота относятся:
1. Малая металлоемкость конструкции, высокие показатели использования металла. Это объясняется тем, что внешняя магнитная система органически входит в конструкцию робота, являясь ее составной механической частью, выполняющей функции основной опорной колонны с направляющим механизмом.
2. Эта же причина обуславливает то, что объемные показатели робота практически не изменяются по сравнению с прототипом, а масса подвижной руки с блоком приводов существенно уменьшается за счет переноса магнитных систем на основание.
3. Уменьшение массы и габаритов подвижной части при сохранении суммарных массы и габаритов повышает производительность робота, т.к. уменьшается время протекания процесса пуска и торможения, или же повышается грузоподъемность при прежних динамических показателях.
Источники информации
1. Литвиненко А.М. Электромеханический манипулятор с внешними магнитными системами. - Электричество, 1988, 7, стр. 57-62.
2. А. С. СССР 1465305 /А.М.Литвиненко - Промышленный робот/ опубл. Б.И. 10, 1989, В 25 J, 1/00, з-ка 4198381/31-08 от 24.02.87.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| ПРИВОД РОБОТА | 2003 |
|
RU2248269C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |

Изобретение относится к электромеханическим манипуляторам промышленных роботов, преимущественно выполненным с внешними магнитными системами. Промышленный робот содержит руку с приводами и схватом, основание и внешние магнитные системы, привод подъема. Он выполнен с горизонтально-ангулярной системой координат. При этом рука выполнена шарнирной. Внешние магнитные системы выполнены в виде последовательно расположенных рядов. Причем каждая предыдущая внешняя магнитная система выполнена с продольным пазом, в котором расположены валы роторов каждой последующей магнитной системы. Изобретение позволит расширить функциональные возможности робота. 5 ил.
Промышленный робот, содержащий руку с приводами и схватом, основание и внешние магнитные системы, отличающийся тем, что он выполнен с горизонтально-ангулярной системой координат, дополнительно содержит привод подъема, при этом рука выполнена шарнирной, внешние магнитные системы выполнены в виде последовательно расположенных рядов, причем каждая предыдущая внешняя магнитная система выполнена с продольным пазом, в котором расположены валы роторов каждой последующей магнитной системы.
| Промышленный робот | 1987 |
|
SU1465305A1 |
| Промышленный робот | 1987 |
|
SU1459921A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| US 4607998, 26.08.1986. | |||
