1
Изобретение относится к автоматике и вычислительной технике и может .быть использовано в позиционных системах управления станками.
Цель изобретения - повышение быстродействия устройства путем введения функциональных блоков, опреде ляющих путь торможения с учетом изменения скррости перемещения и пройденного пути.
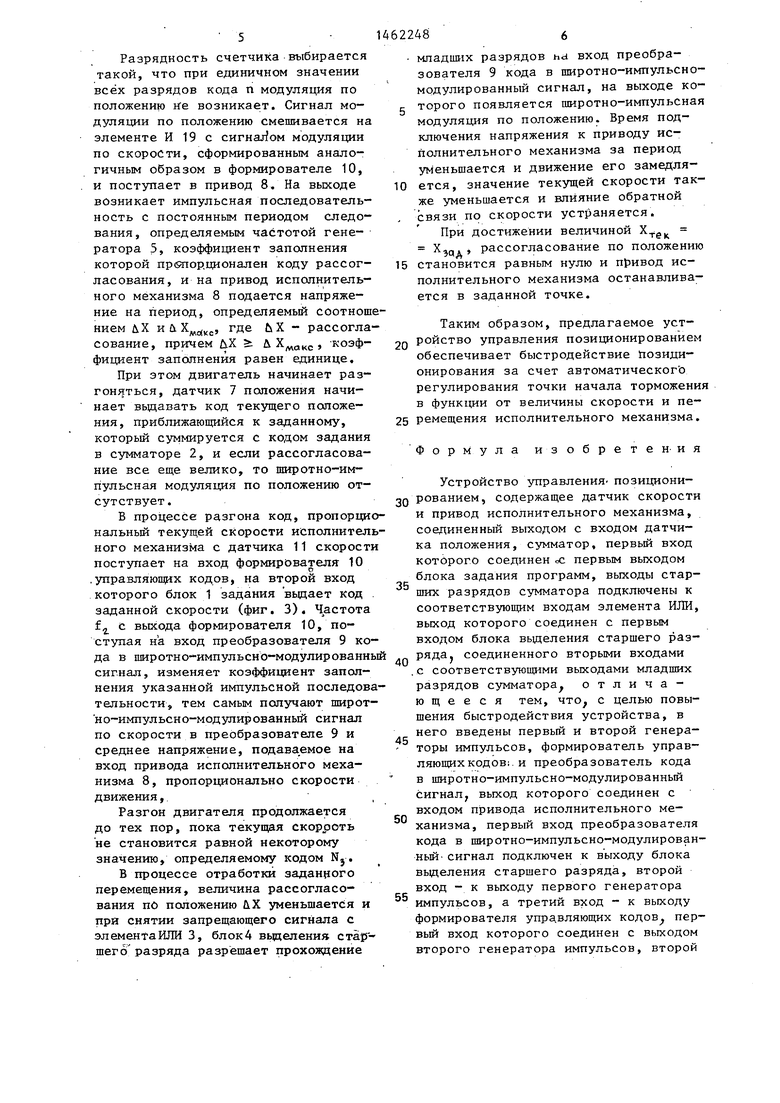
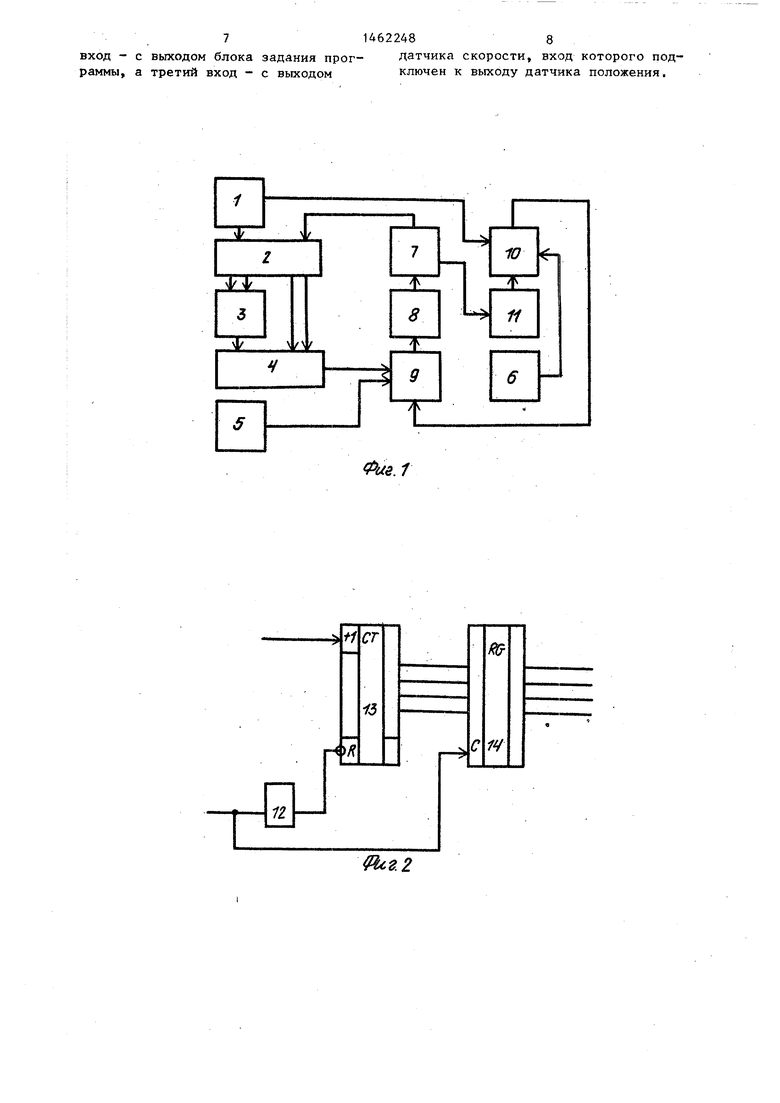
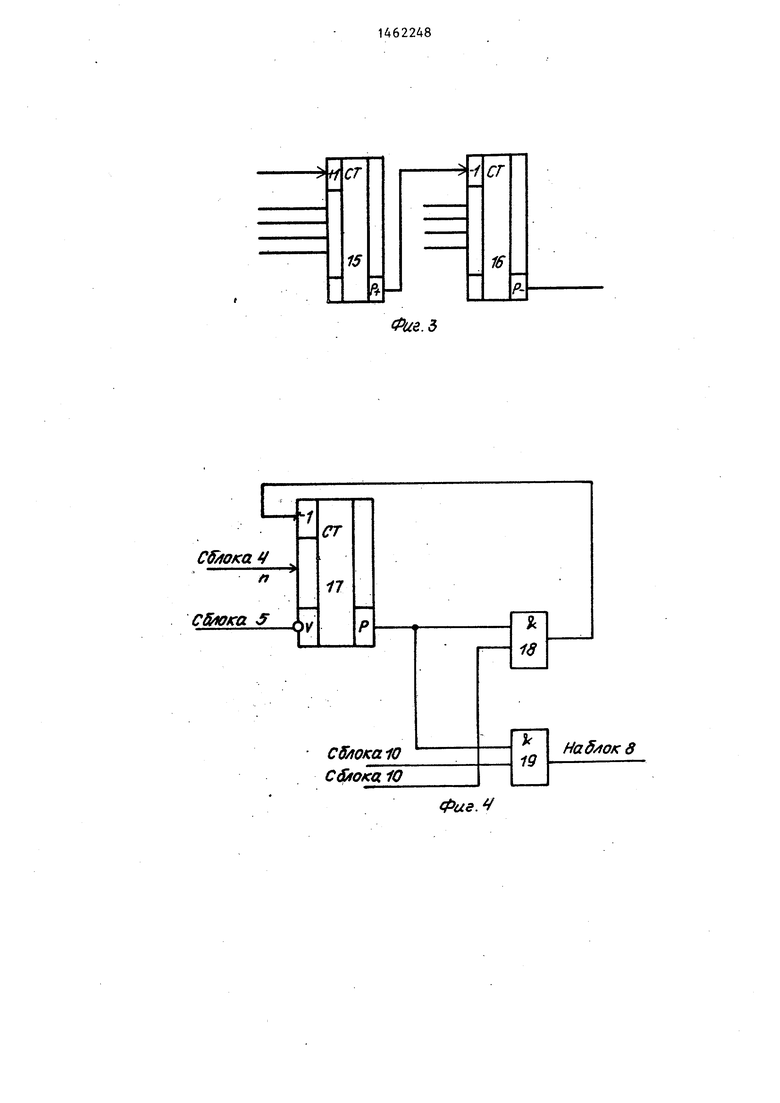
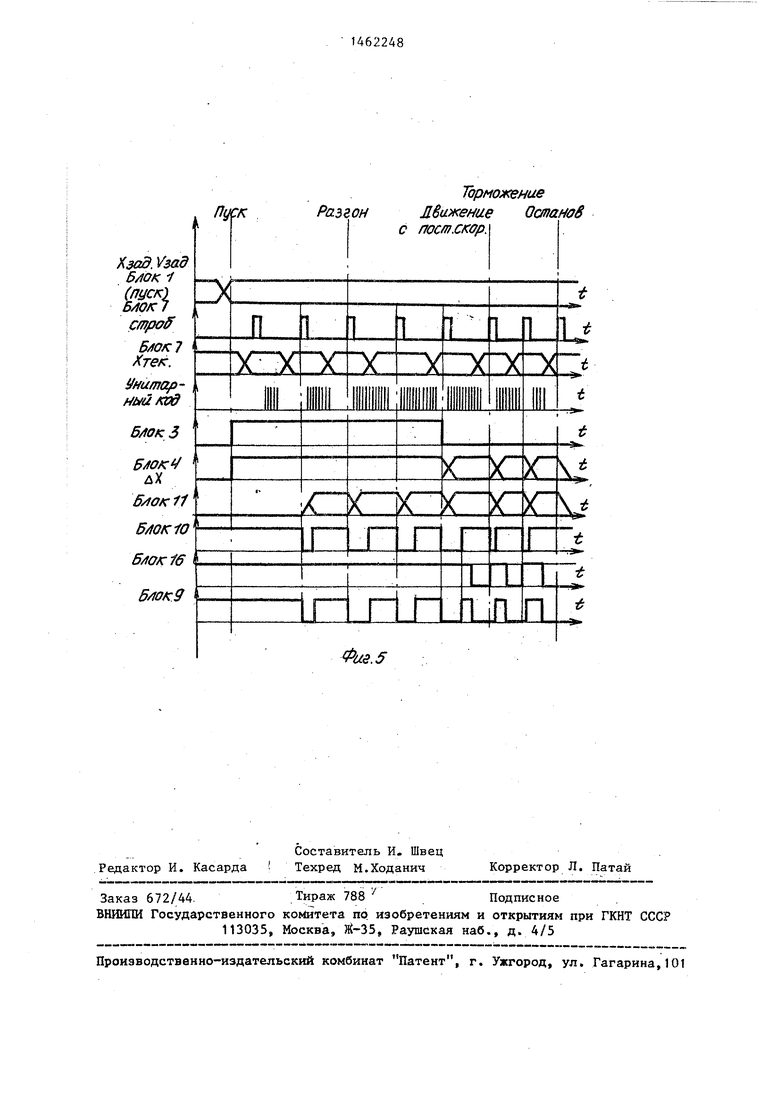
На фиг. 1 приведена блок-схема устройства управления позиционированием; нафиг. 2-датчик скорости; нафиг. 3 - блок-схема формирователя управляющих кодов; на фиг. 4 - пример выполнения блока 9; на фиг. 5 - временные диаграммы ,.
Устройство управления позиционированием содержит блок 1 задания
hporpaMM, сумматор 2, элемент ИЛИ 3, блок 4 вьщеления старшего разряда, первый генератор 5, второй генератор 6, датчик 7 положения, привод исполнительного механизма 8, преобразователь 9 кода в широтно-импульс- но-модулированный сигнал, формирователь 10.управляющих кодов, датчик 11 скорости.
Датчик 11 скорости содержит элемент 12 задержки, реверсивный счетчик 13, регистр 14. Блок 10 содержит счетчики 15 и 16, а блок 9 - реверсивный счетчик 17, элементы И 18 и 19. Датчик 7 положения служит для формирования параллельного двоичного кода, соответствующего истинному положению подвижной части исполнительного механизма.
Ф
Од
ю ю
lit
00
преобразователь кода в широтно-им - пульсно-модулированный сигнал 9 преобразует поступающие на его вход коды управления в последовательность импульсов постоянной частоты, длительность которых пропорциональна модулю кодов управления по положению и по скорости. Блок 10 предназначен для формирования управляющих кодов по скорости, поступающих на преобразователь кода в широтно-импульсно- модулированный сигнал.
Код, пропорциональный заданной скорости (NJ), поступает на входы параллельной записи счетчика 1 с блока 1 задания, а на вход +1 посту- . пают импульсыс опорного генератора 6. .
Перенос N, в счетчик 16 происходит по импульсам переполнения, форми- рующимся на выходе счетчика 15 с частотой f.
10
20 2248
чем больше скорость движения, тем больше значение кода накопителя в счетчике за интервал интегрирования.
Импульсы, следующие с периодом интегрирования, переносят накопленное значение в регистр 14 и после небольшой задержки в датчике скорости сбрасывают значение счетчика 13, тем самым подготавливая его к следующему циклу интегрирования.
В регистре 14 хранится код, пропорциональный мгновенному значению текущей скорости исполнительного ме- 15 ханизма, Меняя интервал интегрирования, можно менять точность измерения скорости.
Устройство управления позиционированием работает след-ующим образом.
Блок 1 задания программ вьщает на вход сумматора 2 код заданного положения, на второй вход которого посту

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Преобразователь перемещения в код | 1982 |
|
SU1030824A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Цифровой регулятор | 1982 |
|
SU1019397A1 |
| Цифровой демодулятор сигналов фазоразностной модуляции второго порядка | 1989 |
|
SU1716616A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах ЧПУ различных позиционных систем. Устройство управления позиционированием обеспечивает быстродействие позиционирования за счет автоматического регулирования точки начала торможения в функции от величины скорости и перемещения подвижной части исполнительного механизма. Цель изобрет ения - повышение быстродействия устройства. Устройство управления позиционированием содержит датчики положения, скорости, привод исполнительного механизма, сумматор, блок задания программ, первый и второй генераторы импульсов, формирователь управляющих кодов, преобразователь кода в широтно-импульсно-модули- рованный сигнал, элемент ИЛИ, блок выделения старшего разряда. 5 ил. о СО
f - f N-Nj
(1)
где fg - частота опорного генерато.ра 6;
N - разрядность счетчика 14. Таким образом, на счетчике 15 сформирован делитель частоты с коэффициентом деления, равным (N-N). Код текущего значения скорости N с датчика 11 скорости поступает .на входы параллельной записи информации счетчика 16, а вход -1 поступают импульсы с частотой f . Перенос N в счетчик 16 происходит по импульсам переполнения, формирующимся на выходе счетчика 16 с частотой f,
f,fo
.f.
N (N-N)-N;
.T --.. 1
(2)
(3)
Таким образом, период следования импульсов на выходе формирователя 10 управляющих кодов прямо пропорцинален текущему значению скорости и- обратно пропорционален заданному значению скорости, причем, меняя N, можно регулировать степень влияния Nj на период.
Датчик 11 скорости формирует двоичный параллельный код, пропордао- нальный мгновенному значению текущей скорости исполнительного мехами зма.При поступлении унитарного кода с датчика 7 положения в счетчике 13 накапливается значение кода, причем
5
0
пает код текущего положения исполнительного механизма с датчика 7 по5 ложения. На выходе сумматора возникает код рассогласования, который через блок 4 выделения старшего разряда подается на вход преобразователя 9 кода в широтно-импульсно-моду0 лированный сигнал.
По сигналам с генератора 5, работающего с частотой вьщачи кодов с датчиком положения и синхронизированного с ним (в частном случае, генератор 5 может быть исключен и заменен сигналами Строб . с датчика 7)., п-разряд- ный код с выхода блока 4 переносится в реверсивный счетчик 17. Выход, перенос по вычитанию, Р-счетчика переводится в единичное состояние и на элементе И 18 канал деблокирует прохождение частоты fa от формирователя 10 на вход -1 счетчика.
Начинается списывание кода, записанного в счетчике. Если значение этого кода достаточно мало, чтобы в интервале поступления стробов от генератора 5 быть полностью списанным частотой f2 , выход Р-переходит в нулевое состояние, блокирует элемент И 18 и сохраняет выход Р- в этом состоянии до прихода следующего сигнала Строб. Тем самым на выходе Р-счёт- чика формируется сигнал модуляции по положению, обеспечивающий торможение привода. Посколькучастота.f2 является функцией заданного и текущего значений скорости, торможение начинается тем раньше, чем выще скорость движения.
5
О
5
Разрядность счетчика выбирается такой, что при единичном значении всех разрядов кода п модуляция по положению ие возникает. Сигнал модуляции по положению смешивается на элементе И 19 с сигнал ом модуляции по скорости, сформированным аналогичным образом в формирователе 10, и поступает в привод 8. На выходе возникает импульсная последовательность с постоянным периодом следования, определяемым частотой генератора 5, коэффициент заполнения которой пр(5пор.ционален коду рассогласования, и на привод исполнительного механизма 8 подается напряжение на период, определяемый соотношением и U ,;,, где - рассогласование, причем йХ 5; U X
ллакс
коэффициент заполнения равен единице.
При этом двигатель начинает разгоняться, датчик 7 положения начинает вьщавать код текущего положения, приближающийся к заданному, который суммируется с кодом задания в сумматоре 2, и если рассогласование все еще велико, то широтно-импульсная модуляция по положению отсутствует.
В процессе разгона код, пропорциональный текущей скорости исполнительного механизма с датчика 11 скорости поступает на вход формирователя 10 .управляющих кодов, на второй вход которого блок 1 задания вьщает код заданной скорости (фиг. 3). Частота f с выхода формирователя 10, поступая на вход преобразователя 9 ко45
да в широтно-импульсно-модулированный ряда, соединенного вторыми входами сигнал, изменяет коэффициент заполнения указанной импульсной последовательности, тем самым получают щирот- но-импульсно-модулированный сигнал по скорости в преобразователе 9 и среднее напряжение, подава емое на вход привода исполнительного механизма 8, пропорционально скорости движения,,
Разгон двигателя продолжается до тех пор, пока текущая скорость не становится равной некоторому значению, определяемому кодом Nj.
В процессе отработки заданного перемещения, величина рассогласования по положению йХ уменьшается и при снятии запрещающего сигнала с элементаИЛИ 3, блок4 вьделения щег6 разряда разрешает прохождение
50
55
.с соответствующими выходами младших разрядов сумматора отличающееся тем, что с целью повы шения быстродействия устройства, в него введены первый и второй генера торы импульсов, формирователь управ ляющих код OBI. и преобразователь кода в широтно-импульсно-модулированный сигнал, выход которого соединен с входом привода исполнительного механизма, первый вход преобразовател кода в широтно-импульсно-модулирова ньй-сигнал подключен к выходу блока вьщеления старшего разряда, второй вход - к выходу первого генератора импульсов, а третий вход - к выходу формирователя упра.вляющих кодов пе вый вход которого соединен с выходо второго генератора импульсов, второ
4622486
младших разрядов па вход преобразователя 9 кода в широтно-импульсно- модулированный сигнал, на выходе которого появляется широтно-импульсная модуляция по положению. Время подключения напряжения к приводу исполнительного механизма за период уменьшается и движение его замедля10 ется, значение текущей скорости также уменьшается и влияние обратной связи по скорости устраняется.
При достижении величиной X,g. , рассогласование по положению
15 становится равным нулю и привод исполнительного механизма останавливается в заданной точке.
Таким образом, предлагаемое уст- ройство управления позиционированием обеспечивает быстродействие позиционирования за счет автоматическогЬ регулирования точки начала торможения в функ1Ц1и от величины скорости и пе- ремещения исполнительного механизма.
Формула изобретен-ия
Устройство управления- позициони- рованием, содержащее датчик скорости и привод исполнительного механизма, соединенный выходом с входом датчика положения, сумматор, первый вход которого соединен оС первым выходом блока задания программ, выходы старших разрядов сумматора подключены к соответствующим входам элемента ИЛИ, выход которого соединен с первым входом блока вьщеления старшего раз
ряда, соединенного вторыми входами
с соответствующими выходами младших разрядов сумматора отличающееся тем, что с целью повышения быстродействия устройства, в него введены первый и второй генераторы импульсов, формирователь управляющих код OBI. и преобразователь кода в широтно-импульсно-модулированный сигнал, выход которого соединен с входом привода исполнительного механизма, первый вход преобразователя кода в широтно-импульсно-модулирован- ньй-сигнал подключен к выходу блока вьщеления старшего разряда, второй вход - к выходу первого генератора импульсов, а третий вход - к выходу формирователя упра.вляющих кодов первый вход которого соединен с выходом второго генератора импульсов, второй
714622488
вход - с выходом блока задания прог- датчика скорости, вход которого под- раммы, а третий вход - с выходом ключей к выходу датчика положения
fl
г
Фие. 1
сг
(
П
Псе.2
СЕ
п CSwfca -У
Ои
ст п
CS/iOKa 10
CS/iOKO. iO
4%г.З
Надмок 8
Фие.
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система программного управления с адаптивным позиционированием привода | 1980 |
|
SU943646A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
