f12
Изобретение относится к устройствам программного управления и может использоваться, в частности, для управления автооператором.галь ванической линией, перемещающимся в определенной технологической пойледовательности от одной рабочей позиции к другой.
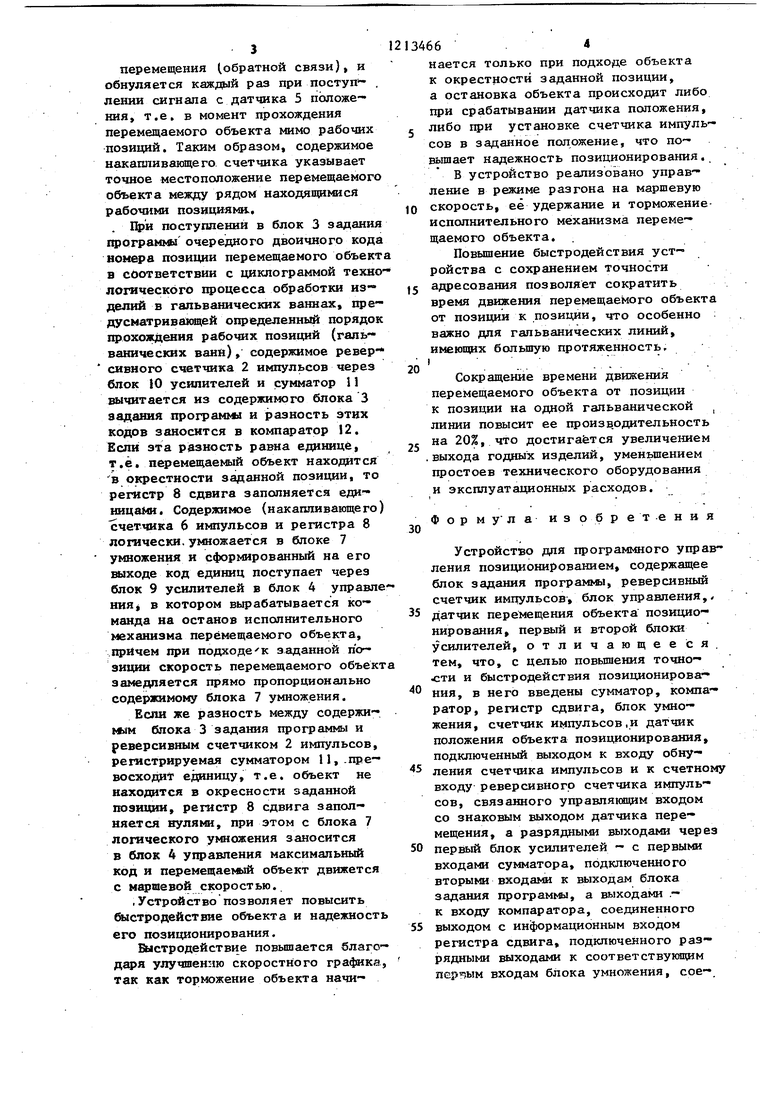
На фиг.1 дана функциональная схема устройства; на фиг.2 - временная диаграмма функционирования уст- ройства.
Устройство содержит датчик 1 перемещения объекта позиционироваия, реверсивный счетчик 2 импульсов, блок 3 задания программы, блок 4 управления, датчик 5 положения объекта позиционирования, счетчик 6 импульсрв, блок 7 умножения, регистр 8 сдвига, второй 9 и первый 10 блоки усилителей, сумматор 11, компаратор 12.
Датчик перемещения предназначен для выдачи сигналов отработки исполнительным механизмом перемещаемого 6б1.екта; сигнала знака - сигнала разного уровня О или 1, подаваемого на управляющий вход раверсивного счетчика 2 импульсов, и сигнала, подаваемого на счетный вход счет.чика 6 импульсов.
Реверсивный счетчик 2 импульсов предназначен для счета сигналов рабочих позиций при перемещении объекта в прямом или обратном направлениях.
Блок 3 задания программа предназначен для хранения кода числа очередной позиции перемещения объекта.
Блок 4 управления предназначен для отработки управляющих сигналов, поступающих на исполнительный механизм перемещаемого объекта.
Блок 4 управления пр-едставляет собой цифроаналогоЕа 1й преобразователь с усилителем, подключенным к его аналоговому выходу. Непосредственно к усилителю подключается двигатель постоянного тока.
Датчик 5 положения объекта позиционирования предназначен дня выдачи сигналов положения рабочих позиций на установочный в О вход счетчика 6 импульсов.
Счетчик 6 импульсов предназначен дпя счет (шгналов отработки испол- нительного ьюханизма перемещаемого объекта.
34662
Блок 7 умножения предназначен дпя выработки выходных сигналов, подаваемых через блок 9 усилителей в блок управления, как функции ло-
гического умножения выходных сигналов (накопительного) счетчика 6 , импульсов и регистра 8.
Регистр 8 сдвига предназначен для хранения двоичного кода устаиовки позиции останова (заданной позиции) перемещаемого объекта. Сумматор 11 предназначен для вычитания входных сигналов, по ступающих с выходов блока 3 зад ания
5 программы и реверсивного счетчика 2 импульсов и характеризующих коды двоичных чисел, содержащихся в них, и выдачи выходных сигналов на компаратор 12.
0 Компаратор 12 предназначен для преобразования сигналов параллельного кода в последовательный код двоичного числа и выдачи последнего в регистр 6.
5Устройство работает следующим .
образом.
В момент прохождения упра вляа- мого объекта мимо рабочих позиций 5 положения объекта позицио-,
Q нирования вырабатывает импульс в рев ерсивный счетчик 2 импульсов. В зависимости от направления движения, определяемого знаковым разрядом датчика 1 перемещения (обратной .связи), если уровень сигнала датчика равен логическому нулю, то реверсивный счетдак 2 импульсов работает в режиме Сложение и, наоборот, если уровень сигнала дат-
р чика I равен, логической единице, то реверсивный счетчик 2 импульсов работает в режиме Вычитание, по сигналу датчика 5 положения, поступающему на счетный вход ревер-
, сивного счетчика 2 импульсов, со держимое реверсивного счетчика возрастает или убывает на . . Таким образом, считая, что объект начал перемещаться с начальной позиции в прямом направлении, содержимое реверсивного счетчика 2 импульсов означает номер позиции, в окрестности которой находится объект в данный момент времени.
5Одновременно, при движении объекта в прямом или обратном нацравле- НИИ счетчик.6 импульсов накапливает импульсы, вырабатываемые датчиком
0
перемещения (обратной связи), и обнуляется каждай раз при поступ , Ленин сигнала с датчика 5 положения, т.е. в момент прохождения перемещаемого объекта мимо рабочих позиций. Таким образом, содержимое накапливающего счетчика указывает точное местоположение перемещаемого объекта между рядом находящимися рабоч}1ми позициями.. . поступлений в блок 3 задания прОграм1Ф1 очередного двоичного кода номера позиции перемещаемого объект в соответствии с циклограммой техно логического процесса обработки из делий в гальванических ваннах, пре- дусматривахяцей определенный порядок прохоясдения рабочих позиций (гальванических ванй) содержимое ревер сивного счетчика 2 импульсов через блок 10 усилителей и сумматор }1 вычитается из содержимого блока 3 задания програмьш и разность этих кодов заносится в компаратор 12. Если зта разность равна единице, т.е. перемещаемый объект находится в окрестности заданной позиции, то регистр 8 сдвига заполняется еди- ница14Н. Содержимое (накапливающего) счетчика 6 импульсов и регистра 8 логически.умножается в блоке 7 умножения и сформированный на его выходе код единиц поступает через блок 9 усилителей в блок 4 управле иия в котором вырабатывается команда на останов исполнительного механизма перемещаемого объекта, причем при подходе К заданной п о- зиции скорость перемещаемого объект замедляется прямо пропорционально содержимому блока 7 умножения.
Если же разность между содержимом блока 3 задания программы и реверсивным счетчиком 2 импульсов, регистрируемая сумматором 11,.превосходит единицу, т.е. объект не находится в окресности заданной позиции, регистр 8 сдвига заполняется нулямн, при этом с блока 7 логического умножения заносится в блок 4 управления максимальный код и перемещаемый объект движется с маршевой скоростью.
.Устройство позволяет повысить быстродействие объекта и надежность его позиционирования.
Быстродействие повышается благодаря улучшению скоростного графика, так как торможение объекта начи134664
нается только при подходе объекта к окрестности заданной позиции, а остановка объекта происходит либо при срабатывании датчика положения, г либо при установке счетчика импульсов в заданное положение, что повышает надежность позиционирования.
В устройство реализовано управление в режиме разгона на маршевую 10 скорость, её удержание и торможение- исполнительного механизма перемещаемого объекта.
Повышение быстродействия устройства с сохранением точности адресования позволяет сократить время движения перемещаемого объекта от позиции к позиции, что особенно важно для гальванических линий, имеющих большую протяженность,
20 . ... - - . . Сокращение времени движения
перемещаемого объекта от позиции к позиции на однрй гальванической , линии повысит ее произв.одитепьность -, на 20%, что достигается увеличением .выхода годных изделий, уменьшением простоев технического оборудования и эксплуатационных расходов.
15
Формула изобретения
Устройство для программного управ ления позиционированием, содержащее блок задания программы, реверсивный счетчик импульсов, блок управления, датчик перемещения объекта позиционирования, первый и второй блоки усилителей, отличающееся, тем, что, с целью повышения точности и быстродействия позиционирования, в него введены сумматор, компаратор, регистр сдвига, блок умножения, счетчик импульсов,и датчик положения объекта позиционирования, подключенный выходом к входу обнуления счетчика импульсов и к счетному входу реверсивного счетчика импульсов, связанного управлякщим входом со знаковым выходом датчика перемещения, а разрядными выходами через первый блок усилителей - с первыми входами сумматора, подключенного вторыми входами к выходам блока задания программл, а выходами .- к входу компаратора, соединенного выходом с информационным входом регистра сдвига, подключенного разрядными выходами к соответствунлдим входам блока умножения, сое-.
диненного вторыми входа а1 с соответствующими разрядными выходами счетчика импульсов, а выходами через второй блок усилителей - с
входами блока управлеиия, тфичем счетный вход счетчика импульсов подключен к информационному выходу датчика перемещения.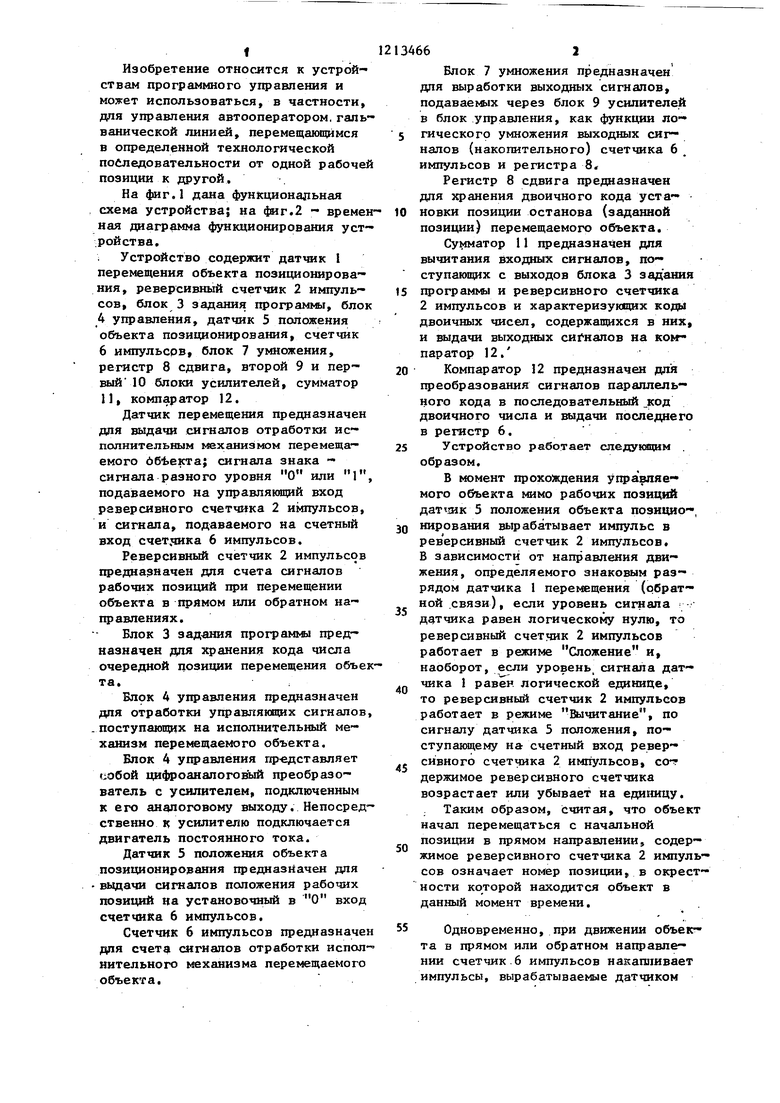
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Многоканальное устройство для управления позиционированием | 1984 |
|
SU1242917A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
Изобретение относится к устрой- ствам програминого управления и мо , жет использоваться для управления автооператорон гальванической линии, перемещающимся в 01(ределенной техно- логической последовательности от одной рабочей позиции к другой. ройство содержит датчик перемещения объекта позиционирования, реверсивный счетчик импульсов, блок задания программы, блок управления, датчик положения .объекта позиционирования, счетчик импульсов, блок умножения, регистр сдвига, первьп и второй блоки усилителей, сумматор, компаратор. Это позволяет повысить точность устройства, т;к. торможение объекта начинается только при подходе объекта к окрестности заданной позиции, а останов происходит либо при срабатывании датчика положения, либо при установке счетчика импульсов в заданное положение, и его быстродействие, т.к. в устройстве реали- зрвано управление в режиме разгона на маршевую скорость. 2 ил. Од 14 Од
-tf--.t
S яцета вправо
х
х
Вращение влеВо
ВНИИПИ Тираж 837
Заказ 780/57 Подписное
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
| Устройство для управления автооператорными линиями | 1976 |
|
SU658527A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления перемещением объекта | 1977 |
|
SU741233A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
