Изобретение относится к медицинской технике, а именно к устройствам для осуществления механотерапии
Цель изобретения - исключение боле вых ощущений путем обеспечения совмещения центра поворота ложемента бедра с осью тазобедренного сустава пациента
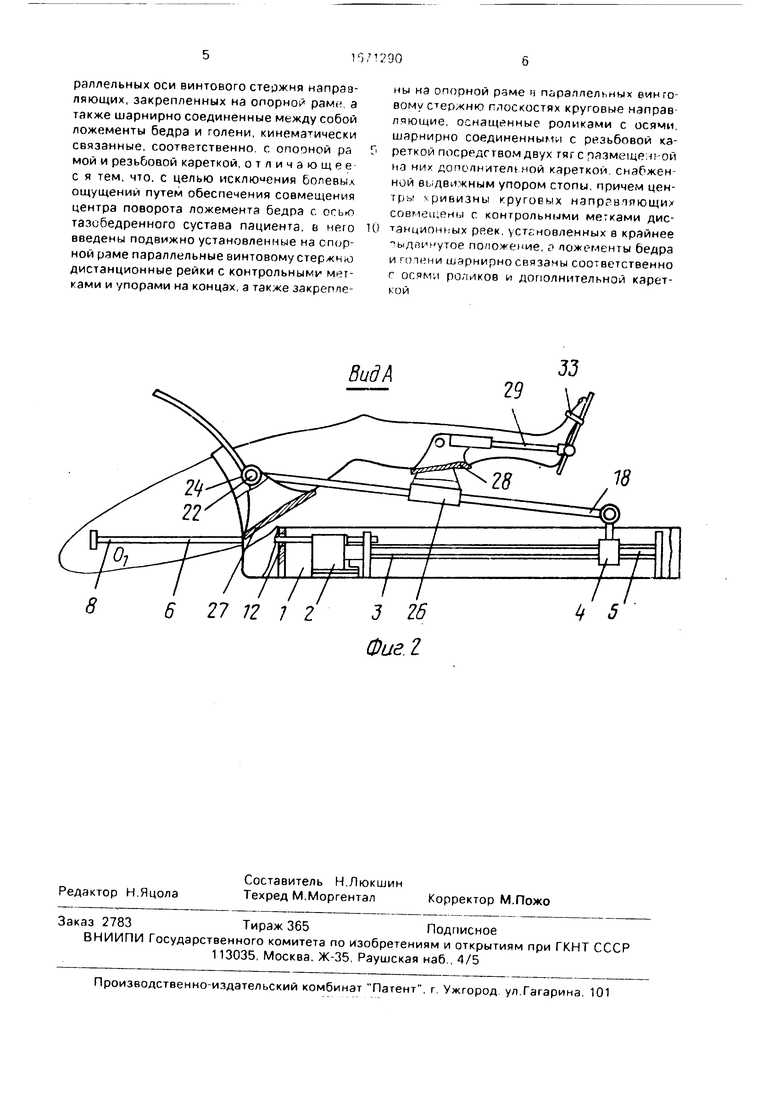
На фиг. 1 показано устройство, вид сверху; на фиг. 2 - вид А на фиг 1
Устройство содержит упорную раму 1, на которой установлен привод 2 с винтовым стержнем 3 и размещенной на нем резьбовой кареткой 4, расположенной на двух параллельных оси винтового стержня 3 направляющих 5, закрепленных на опорной раме 1. С последней установочно-подвижно соединены две параллельные винтовому стержню 3 дистанционные рейки 6 и 7 с контрольными метками 8 и 9 и упорами 10 и
11на концах. Соединения дистанционных реек 6 и 7 с опорной рамой 1 выполнены в виде поступательных кинематических пар
12и 13. На опорной раме 1 закреплены две стойки 14 и 15, снабженные расположенными в параллельных винтовому стержню 3 плоскостях круговыми направляющими 16 и 17, центры Oi и 02 кривизны которых расположенных на прямой, проходящей через контрольные метки 8 и 9 максимально выдвинутых дистанционных реек 6 и 7 Устройство снабжено двумя параллельными тягами 18 и 19, одни концы которых жестко соединены поперечной тягой 20 связанной посредством шарнира 21 с резьбовой карет кой 4, а другие - с осями 22 и 23. которые шарнирно связаны с роликами 24 и 25, установленными на соответствующие круговые направляющие 16 и 17 с возможностью пе ремещения по ним.
Устройство снабжено дополнительно1.. кареткой 26, подвижно размещенной на тягах 18 и 19. Устройство содержит шарнирно (кинематически) связанные ложементы бедра 27 и голени 28, последний оснащен вы движным упором 29 стопы Ложемент 27 бедра связан посредством шарниров 30 и 31 с осями 22 и 23 соответственно, а ложемент 28 голени - посредством шарниров 32 - с дополнительной кареткой 26
Устройство выполнено симметричным относительно вертикальной плоскости, проходящей через ось винтового стержня 3 при этом оси всех шарниров устройства перпендикулярны плоскости симметрии Оно снабжается также конечными выключателями установленными, например, на одной из направляющих 5 (не показаны)
Устройство работает следующим образом
Уст ойстчо уст навливается под больную, например под правую, ногу пациента таким образом, контрольная метка 8 ВЫДВИНУТОЙ ,,истчьционной рейки 6 совместилась с 0 м) гэ .обедренного сустава пациента При ран богке движения левой ноги выдвигается дистанционная рейка 7 и совмещается с соответствующей осью тазобедренного сустава контрольная метка 9
Ногу пациента укладывают на ложемент 27 бедра и ложемент 28 голени Затем под стопу подводят выдвижной упор 29 фиксируют его с ложементом 28 голени и закрепляют стопу эластичным ремнем 33 Режимы реабилитационного движения устанавливаются врачом регулированием скорости и угла сгибания разгибания ноги например, путем изменения величины подаваемого на привод 2 электрического напряжения и по
ложении конечных выключателей соответст венно
При включении привода 2 вращатель ное движение винтового стержня 3 преоб разуется в поступательное движение
резьбовой каретки 4 которое через тяги 18 и 19 передается осям 22 и 23 Последние перемещаясь по круговым направляющим 16 и 17 сообщают ложементу 27 бедра и бедру пациента вращательное движение
вокруг оси тазобедренного сустава без относительного смещения между бедром пациента и ложементом 27 бедра При этом голень пациента с ложементом 28 голени перемещаясь по тягам 18 и 19 и вращаясь
относительно осей шарниров 32 свободно поворачивается относительно бедра пациента Реверсирование движения осуществляется автоматически посредством конечных выключателей
Конструкция предлагаемого устройства
позволяет при механотерапии всегда совместить ось вращения ложемента 27 бедра устройства с осью тазобедренного сустава пациента что исключает болевые ощущения
5 в коленном суставе вызываемые относительными смещениями бедра и ложемента 27 бедра Кроме этого сокращается время подготовки устройства к работе и упрощается его эксплуатация так как отпадает необ
0 ходимость регулировать длину ложемента 27 бедра устройства в соответствии с параметрами нижних конечностей пациента
Формула изобретения
Устройство для разработки движений в коленном суставе содержащее опорную раму, на которой установлен привод с винто вым стержнем и размещенной на нем резьбовой кареткой расположенной на па
раллельных оси винтового стержня направляющих, закрепленных на опорной раме а также шарнирно соединенные между собой ложементы бедра и голени, кинематически связанные, соответственно, с опооной ра мой и резьбовой кареткой, отличающее с я тем, что, с целью исключения болевых ощущений путем обеспечения совмещения центра поворота ложемента бедра с осью тазобедренного сустава пациента, в него введены подвижно установленные на спорной раме параллельные винтовому стержню дистанционные рейки с контрольными метками и упорами на концах, а также закрепле
мы на опорной реме ч параллельных винтовому стержню плоскостях круговые направляющие, оснащенные роликами с осями, шарнирно соединенными с резьбовой кареткой посредством двух тяге размещенной на них дополнительной кареткой, снабженной выдвижным упором стопы, причем цен- трь- кривизны круговых нзпррвтлющиу совмещены с контрольными метками дистанционных реек. стЈновленных в крайнее ыдгчинутое положение, пожементы бедра и гопени шарнирно связаны соответственно г осями роликов и дополнительной кареткой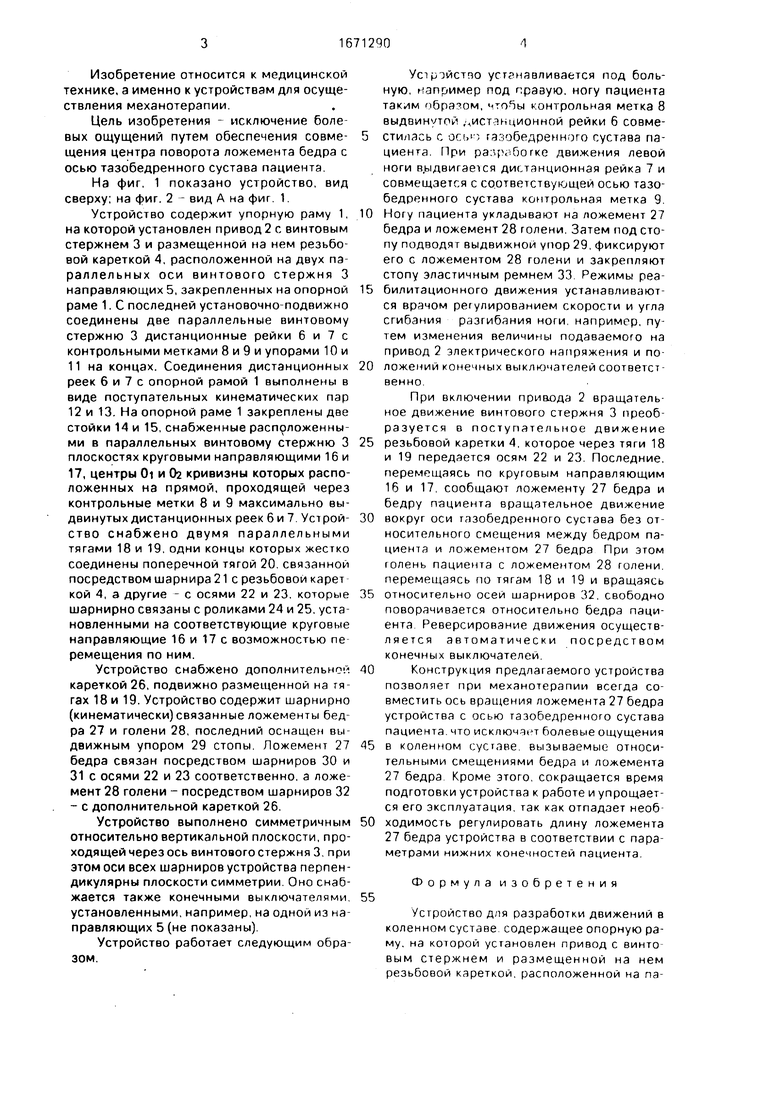
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Устройство для продолжительной иммобилизации и вытяжения при переломе костей голени в предоперационном периоде | 2022 |
|
RU2807393C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Устройство для разработки коленного сустава | 1989 |
|
SU1627176A1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Устройство для разработки суставов нижней конечности | 1985 |
|
SU1255125A1 |
| СПОСОБ ОБУЧЕНИЯ НАВЫКАМ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2099038C1 |
| ОРТОПЕДИЧЕСКАЯ ПРИСТАВКА К ХИРУРГИЧЕСКОМУ СТОЛУ ЦАРЕВА (ВАРИАНТЫ) | 2012 |
|
RU2535282C2 |
Изобретение относится к медицинской технике, в частности к устройствам механотерапии нижних конечностей пациентов. Цель - исключение болевых ощущений путем обеспечения совмещения центра поворота ложемента бедра с осью тазобедренного сустава пациента. Устройство содержит опорную раму 1, смонтированные на ней привод 2 с винтовым стержнем 3, связанным с резьбовой кареткой 4, установленной на двух направляющих 5, закрепленных на опорной раме 1, а также ложементы бедра 27 и голени 28. Устройство также снабжено выдвижными дистанционными рейками 6, 7 с контрольными метками 8, 9 и опорами 10, 11 на концах, расположенными параллельно и жестко связанными с опорной рамой 1 круговыми направляющими 16, 17, центры кривизны которых совмещены с прямой, проходящей через контрольные метки 8, 9 максимально выдвинутых дистанционных реек 6, 7, двумя тягами 18, 19, одни концы которых жестко соединены поперечной тягой 20, шарнирно связанной с резьбовой кареткой 4, а другие - с осями 22, 23, подвижно установленными посредством роликов 24, 25 на соответствующих круговых направляющих 16, 17, дополнительной кареткой 26, установленной на тягах 18, 19 с возможностью поступательного перемещения вдоль них. Ложементы бедра 27 и голени 28 кинематически связаны друг с другом за счет шарнирного соединения первых с осями 22, 23, а вторых - с дополнительной кареткой 26. При этом оси всех шарнирных соединений перпендикулярны вертикальной плоскости симметрии устройства, проходящей через ось винтового стержня 3. 2 ил.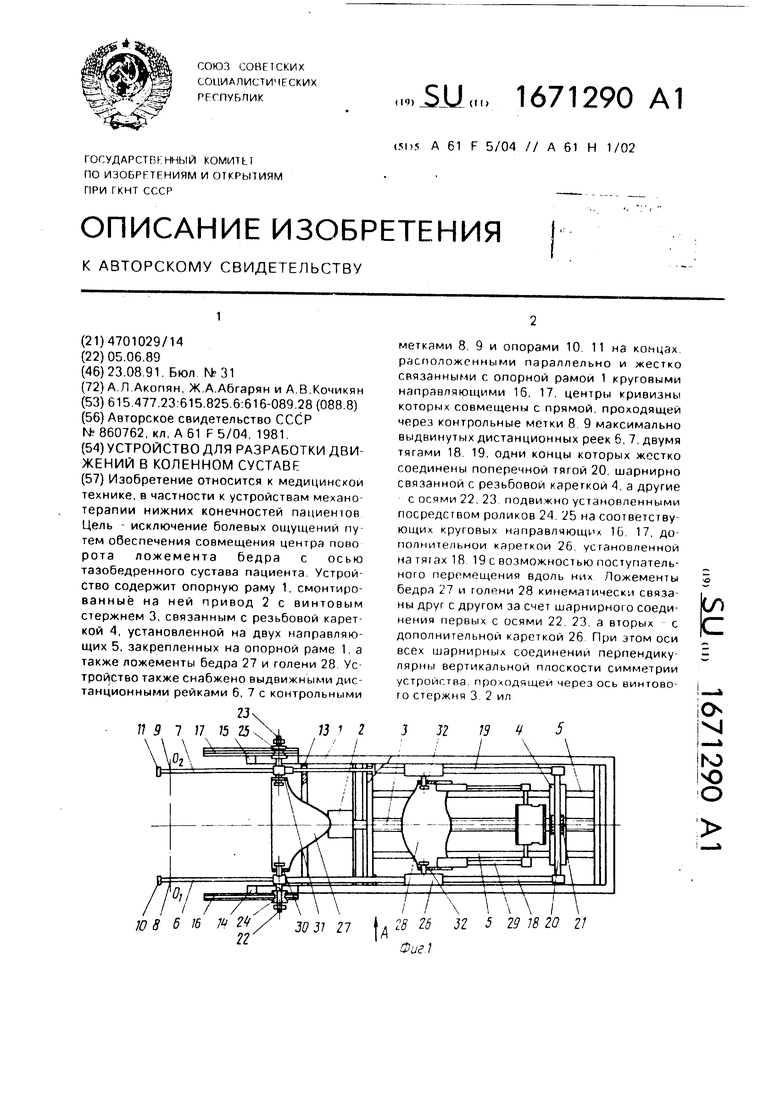
8
Вид А
4 5
| Устройство для разработки движений в коленном суставе | 1979 |
|
SU860762A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
