Известны датчики глубины копания рабочего органа траншейного экскаватора, содержащие шарнирно подвешенный корпус с переключающим механизмом и коленчатый щуп, взаимодействующий с копирным тросом.
Целью описываемого датчика является повышение точности выдерживания заданной глубины копания и уклона дна траншеи.
Достигается это тем, что в корпус датчика встроен соединенный с переключающим механизмом вертикальный копирный стержень, который посредством пружины взаимодействует с установленной на рабочем органе экскаватора копиркой пластиной.
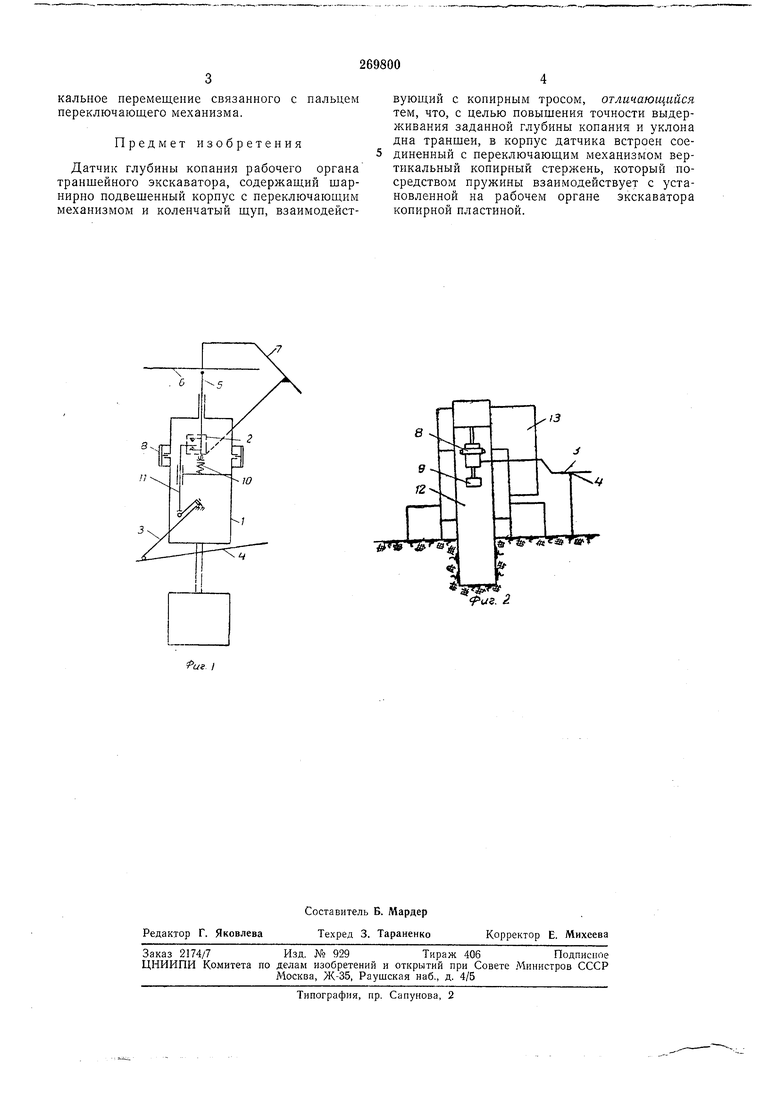
На фиг. I схематично показана установка датчика на экскаваторе, вид сбоку; на фиг. 2 - то же, вид сзади.
Датчик содержит шарнирно подвешенный корпус 1, переключающий механизм 2, коленчатый щуп 3, копирный трос 4, вертикальный копирный стержень 5 и копирную пластину 6.
Датчик крепится к кронштейну 7 посредством двухосного шарнира 8 и удерживается в вертикальном положении грузом 9. К корпусу датчика на подшипниках прикреплен коленчатый щуп 3, взаимодействующий с копирным тросом 4.
стояние от точки подвески датчика до дна транщеи меняется.
Датчик должен управлять исполнительной системой так, чтобы была обеспечена постоянность вертикального расстояния между копирным тросом и дном траншеи.
Например, если при уменьшении глубины копания расстояние от дна траншеи до точки
подвески датчика уменьшается, то в результате изменения наклона рабочего органа меняется и наклон копирной пластины 6. В результате этого переключающий механизм вместе с копирным стержнем под действием
пружины 10 перемещается вверх. Так как переключающий механизм через толкатель 11 связан со щупом, положение которого определяется копирным тросом, происходит включение механизма 2 и подается сигнал на
опускание рабочего органа 12. Вместе с рабочим органом опускается и датчик. Так как свободный конец щупа опирается на трос, происходит поворот его, и толкатель 11 выводит переключающий механизм в нейтральное
положение. Аналогично происходит и корригирование в обратном направлении.
Таким образом, каждому изменению положения рабочего органа экскаватора 13 соответствует определенное перемещение копирнокальное перемещение связанного с пальцем переключающего механизма.
Предмет изобретения
Датчик глубины копания рабочего органа траншейного экскаватора, содержащий шарнирно подвешенный корпус с переключающим механизмом и коленчатый щуп, взаимодействующий с копирным тросом, отличающийся тем, что, с целью повышения точности выдерживания заданной глубины копания и уклона дна траншеи, в корпус датчика встроен соединенный с переключающим механизмом вертикальный копирный стержень, который посредством пружины взаимодействует с установленной на рабочем органе экскаватора копирной пластиной.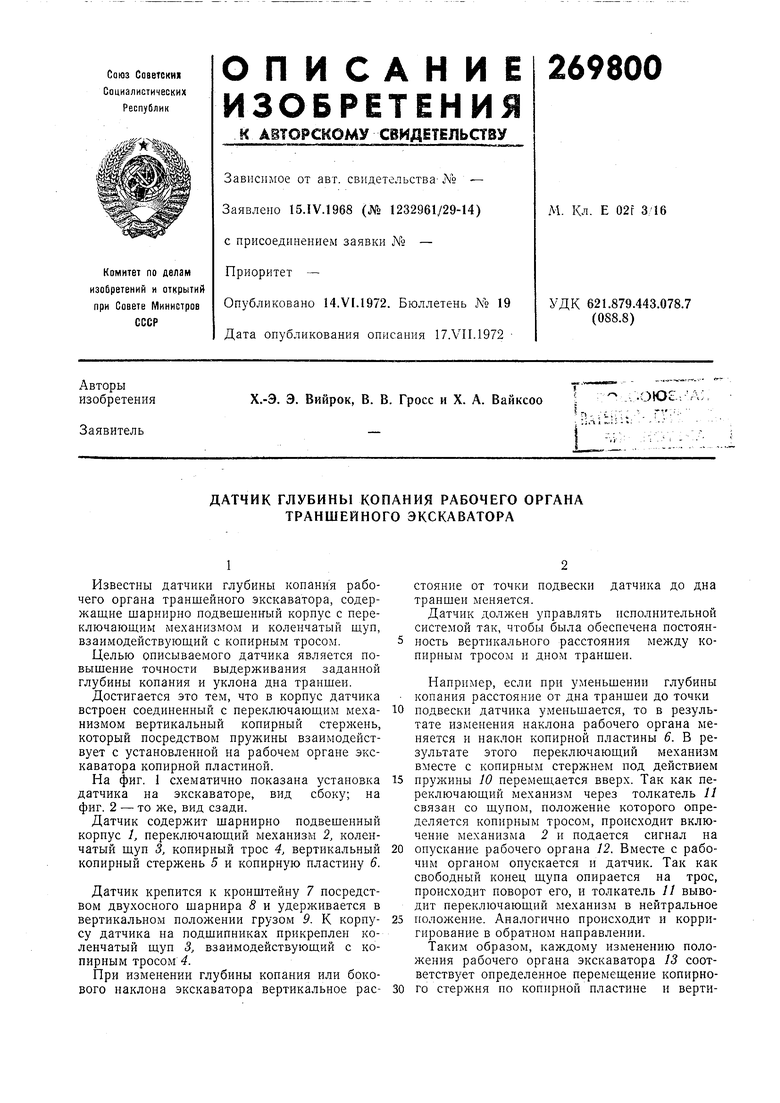
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик глубины копания | 1974 |
|
SU560031A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Датчик глубины копания рабочего органа траншейного экскаватора | 1988 |
|
SU1652467A1 |
| МНОГОКОВШОВЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1967 |
|
SU204255A1 |
| ДРЕНОУКЛАДЧИК | 1971 |
|
SU305243A1 |
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| ХЗНЧГСКАЯ БИБЛИОТЕКАХ.-Э. Э. Виирокi ч | 1966 |
|
SU185279A1 |
/3
аг. 2
