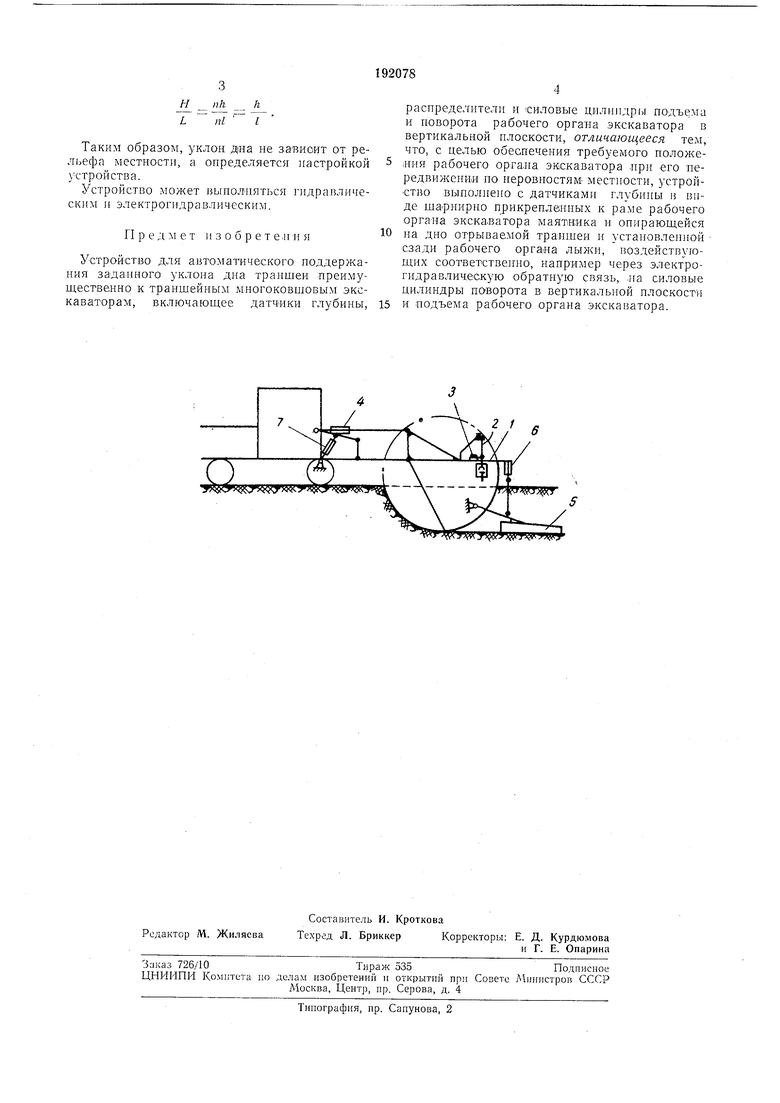
Извеетпые устройства для автоматического поддержания заданного уклона дна трЭНшеи преимуществеппо к трапшейным миогоковшовым экскаваторам, включаюш,ие датчики глубины, распределители и силовые цнлиндры подъема и поворота рабочего органа экскаватора в вертикальной плоскости, не обеспечивают необходимой точности поддержапия задаиного уклона. Предлагаемое устройство обеспечивает требуемое положение рабочего оргапа экскаватора при его передвижении по неровностям местности. Для этого оно выполнено с датчиками глубины в виде шарнирно прикрепленных к раме рабочего органа экскаватора маятника и лыжи, оиирающейся на дно траншеи и установленной сзади рабочего органа. Маятник и лыжа воздействуют соответственно, например через электрогндравлическую обратпую связь, иа силовые цилиндры поворота в вертикальной плоскости и подъема рабочего оргаиа экскаватора. Па чертеже изображена принципиальная схема устройства. Па раме / рабочего органа экскаватора установлен маятник 2, связанный с распределнтелел 3, унравляющим силовыми цилипдрамн 4 поворота рабочего органа. При накло.не рамы 1 маятник 2 перемещает распределитель 3, и в силовые цилиндры 4 поступает масло ДО тех пор, пока не восстановится заданное положение рабочего органа. Таким образом, положение рабочего оргапа относ1ггельно горизонтальной плоскостн ностояпио, и он может подниматься и опускаться только параллельно себе. К раме / шарпирпо прикреплена лыжа 5, связанная с распределителем 6, который управляет силовыми цилиндрами 7 нодъема рабочего органа. Если рабочий орган поднимется или онустнтся относительно дна уже пройденного участка канала, лыжа 5 переместит .распределитель 6, и рабочий оргаи сиова будет иметь заданную высоту. В результате взаимодействпя маятника и лыжи разность уровней опорной поверхности лыжи и пизшей точки рабочего оргаиа постоянна (при данной настройке механизма) ii це зависнт от положення ходовой части, а значнт и от рельефа местности. При перемещении экскаватора на расстояние, равное расстоянию между серединой онорпой поверхности лыжи и ннзшей точкой рабочего органа, последннй подпимется (или опустится) на величину h. Таким образом, уклон дна не за-виоит от рельефа местности, а онределяется настройкой устройства. Устройство может иыполняться гидравлическим и электрогидравлическим. Предмет и з о б р е т е .и и я Устройство для автоматического ноддержания заданного уклона дна траншеи преимущественно к траншейным многоковиювым э.кскаваторал, включающее датчики глубины, 5 10 15 раснределители н юиловые цнли11др1 г нодъема и поворота рабочего органа экскаватора в вертикальной нлоскости, отличающееся тем, что, с нелью обеспечення требуемого положе1ння рабочего органа экскаватора лри его передвижений по неровностям- местности, устройство выполнено с датчиками глубины и виде ша-рнирно прикрепленных к раме рабочего органа экскаватора маятника и опирающейся на дно отрываемой траишен и установленной сзади рабочего органа лыжи, воздействующих соответствешш, например через электрогидравлич.ескую обратную связь, ,на силовые нилиндры поворота в вертикальной плоскости и нодъема рабочего органа экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКОВШОВЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1967 |
|
SU204255A1 |
| УСТРОЙСТВО для ПОДДЕРЖАНИЯ ЗАДАННОГО УКЛОНА ДНА ТРАНШЕИ, ОБРАЗУЕМОЙ ДРЕНАЖНОЙ МАШИНОЙ | 1971 |
|
SU290093A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| ЦЕПНОЙ РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1973 |
|
SU383788A1 |
| ЭКСКАВАТОР-ДРЕНОУКЛАДЧИК | 1971 |
|
SU319251A1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| ДРЕНОУКЛАДЧИК | 1971 |
|
SU305243A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА3ClA^U.-V-= •--; ^1|1ЯЕН1Ш-1:.Ш'•" '^--.БИБЛИОТе-гиЧ J^ | 1971 |
|
SU318663A1 |
| Рабочее оборудование траншеекопателя | 1985 |
|
SU1280163A1 |
| ТРАНШЕЙНАЯ ЗЕМЛЕРОЙНО-Л1ЕЛИОРАТИВНАЯ МАШИНА | 1972 |
|
SU334333A1 |
