тым щупом 8, взаимодействующим с копирным тросом 9.
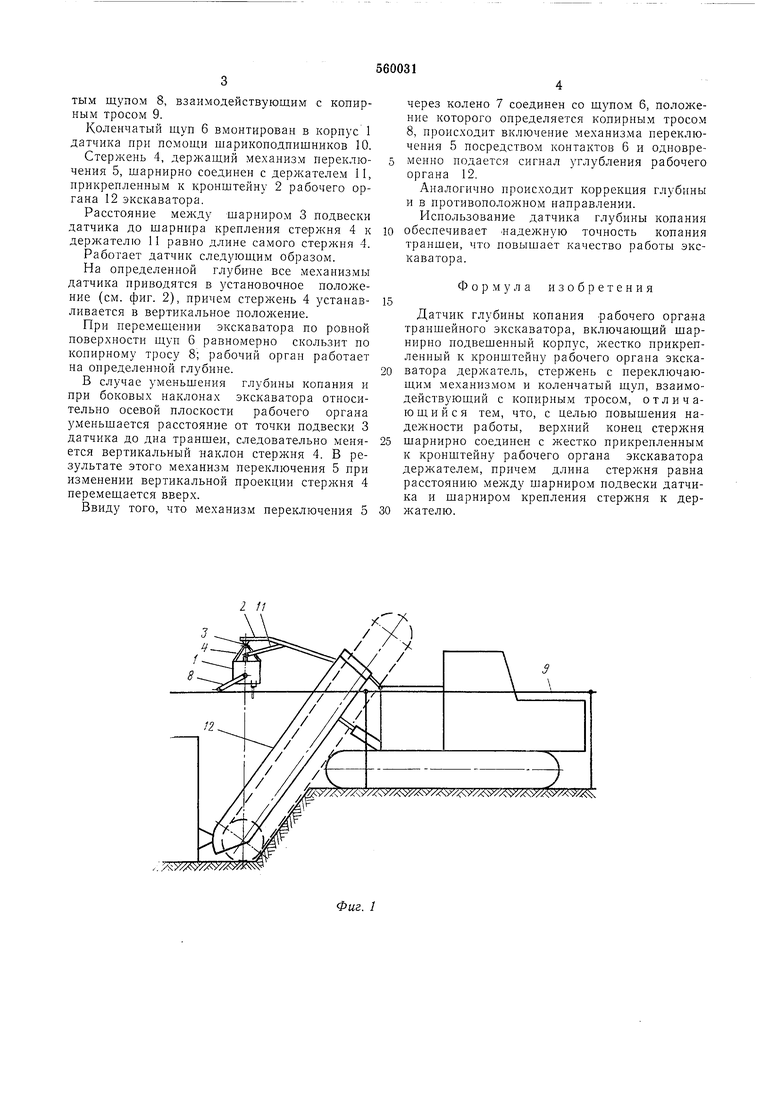
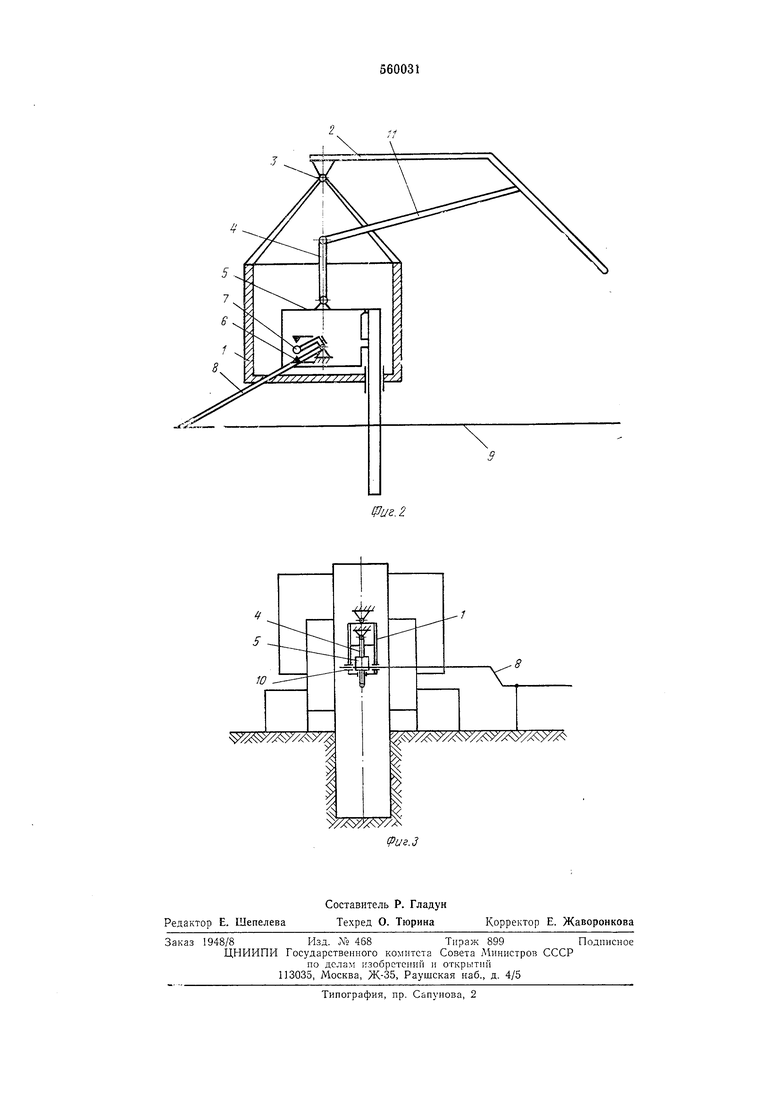
Коленчатый щуп 6 вмонтирован в корпус 1 датчика при помощи щарикоподпищников 10.
Стержень 4, держащий механизм переключения 5, щарнирно соединен с держателем II, прикрепленным к кронщтейну 2 рабочего органа 12 экскаватора.
Расстояние между шарниром 3 подвески датчика до щарнира крепления стержня 4 к держателю 11 равно длине самого стержня 4.
Работает датчик следующим образом.
На определенной глубине все механизмы датчика приводятся в установочное положение (см. фиг. 2), причем стержень 4 устанавливается в вертикальное положение.
При перемещении экскаватора по ровной поверхности щуп 6 равномерно скользит по копирному тросу 8; рабочий орган работает на определенной глубине.
В случае уменьшения глубины копания и при боковых наклонах экскаватора относительно осевой плоскости рабочего органа уменьщается расстояние от точки подвески 3 датчика до дна транщеи, следовательно меняется вертикальный наклон стержня 4. В результате этого механизм переключения 5 при изменении вертикальной проекции стержня 4 перемещается вверх.
Ввиду того, что механизм переключения 5
через колено 7 соединен со щупом 6, положение которого определяется копирпым тросом 8, происходит включение механизма переключения 5 посредством контактов 6 и одновременно подается сигнал углубления рабочего органа 12.
Аналогично происходит коррекция глубины и в иротивоположном направлении.
Использование датчика глубины копания обеспечивает -надежную точность копания траншеи, что повышает качество работы экскаватора.
Формула изобретения
Датчик глубины копания -рабочего органа траншейного экскаватора, включающий щарнирно подвешенный корпус, жестко прикрепленный к кронщтейну рабочего органа экскаватора держатель, стержень с переключающим механизмом и коленчатый щуп, взаимодействующий с копирным тросом, отличающийся тем, что, с целью повышеиия надежности работы, верхний конец стержня шарнирно соединен с жестко прикрепленным к кронщтейну рабочего органа экскаватора держателем, причем длипа стержня равна расстоянию между щарииром подвески датчика и шарниром крепления стержня к держателю.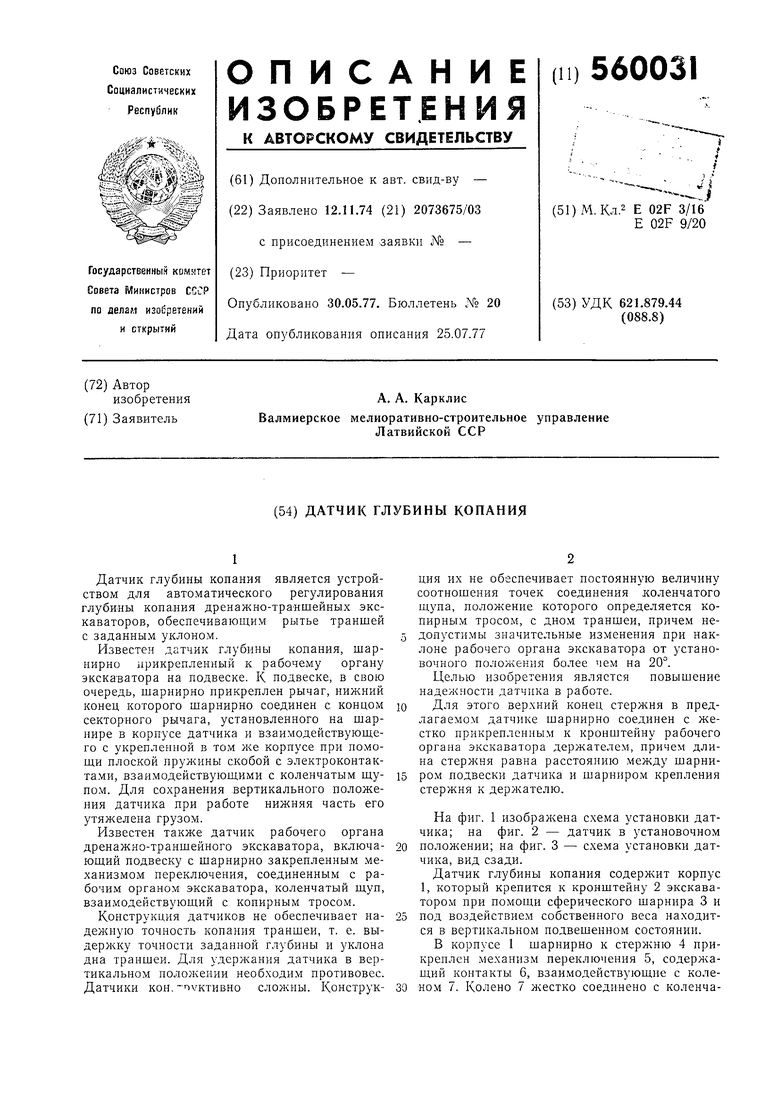
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Электрическое устройство,например,к траншейному экскаватору для автоматического регулирования глубины копания | 1968 |
|
SU313448A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Датчик глубины копания рабочего органа траншейного экскаватора | 1988 |
|
SU1652467A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Дреноукладчик | 1977 |
|
SU702127A1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОРП -ISTUnKO. ,- TEXJjlnjt-r;,.^^ 1/^!^S«.;C^I-::A | 1965 |
|
SU168193A1 |
I f1
,,(
I
