4
i4
00
1U/4/.484
Изобретение относится к строительным и дорожным машиням и может быть использовано на машинах для укладки кабеля, дреноукладчиках.
Цель изобретения - уменьшение усилия натяжения и деформации кабеля световода при укладке.
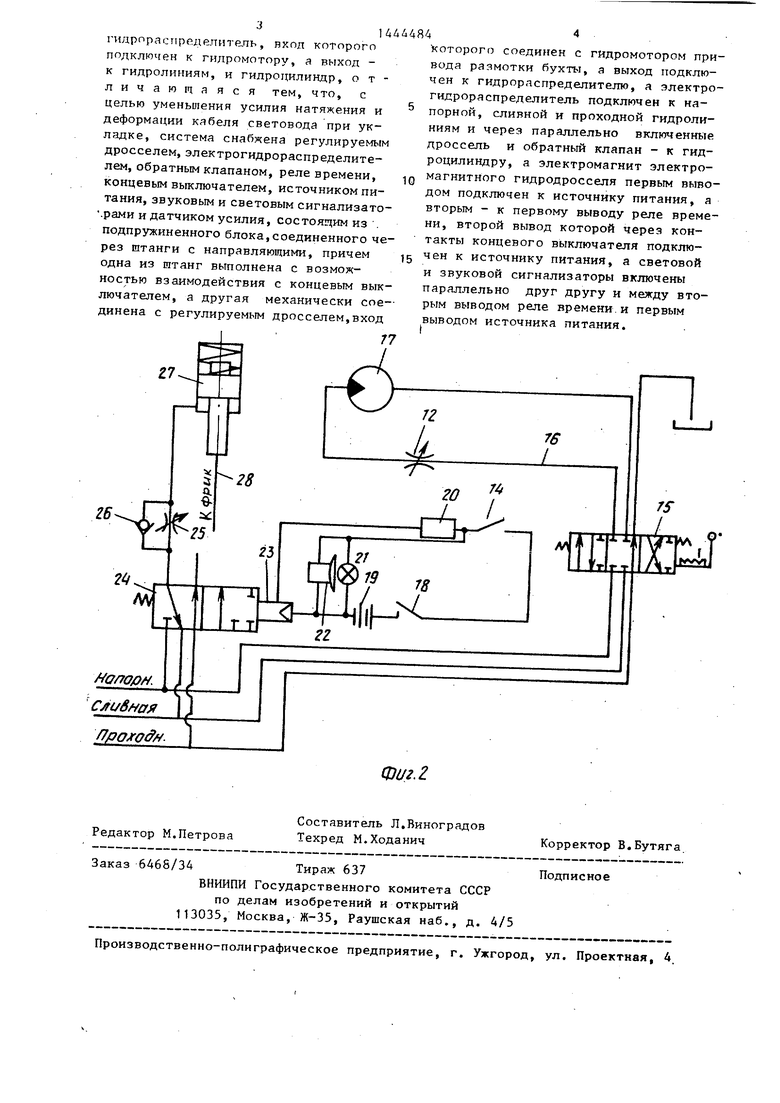
На фиг.1 изображена конструкция датчика усилия и механизма управле- Q ния дросселем; на фиг. 2 - гидравлическая схема системы автоматического регулирования подачи кабеля.
Датчик усилия состоит из блока 1, через который проходит световод, ус- J5 тановленного на оси 2, двух штанг 3 и 4, имеющих возможность перемещения в направляющих 5 и 6. Штанги 3 и 4 подпружинены при помощи пружин 7 и 8. Торцовая часть щтанги 4 соединена при 20 помощи поводка с коромыслом 10 и поводка 11 с тягой регулируемого дросселя 12. На штанге 3 в торцовой ее части установлен регулировочный болт 13 и соосно со штангой постоянно ра- 25 зомкнутый концевой выключатель 14. К дросселю 12 через общий распределитель 15 подведена напорная гидролиния 16, которая соединяет дроссель 12 с гидромотором 17 привода размотки бухты. Электрическая часть схемы включает в себя общий выключатель 18, источник 19 питания, реле 20 времени, световой и звуковой сигнализаторы, состоящие из лампочки 21 и звукового сигнализатора 22, а также электромагнита 23 управления золотником 24 электрогидрораспределителя, который при срабатывании обеспечивает соединение напорной гидролинии 16 через дроссель 25 и обратный клапан 26 с гидроцилиндром 27 одностороннего действия. Шток гидроциликд- ра соединен при помощи гибкой связи 28 с тягами бортовых фрикционов машины.
Система автоматического управления работает следующим образом.
Кабель световода, проходя через
30
35
40
чи 8 ко чи те ни ос ны ка го ты пр ли з те па на ту э пр ни и ли к в ж к п с ж
45
блок 1, при увеличении усилия перемещает щтанги 3 и 4 в направляющих 5 и 6, сжимая при этом пружины 7 и 8 и поворачивая одновременно коромысло 10, обеспечивая тем самым увеличение площади живого сечения дросселя 12. За счет этого увеличиваются подача жидкости на гидромотор 17 и скорость вращения механизма привода размотки«кабеля. При снижении вели
5 0 5
0
5
0
чины усилия на блоке 1 прутопш 7 и 8 перемещают вверх штанги 3 и 4, и коромысло 10, поворачиваясь, обеспечивает дросселирование жидкости и тем самым уменьшает скорость вращения гидромотора 17. Таким образом осуществляется регулирование величины усилия, необходимого на размотку кабеля и его изгиб. Соосно со штангой 3 установлен постоянно разомкнутый концевой выключатель 14. Если при полном открытии дросселя 12 усилие не снижается, головка болта 13 замыкает контакты концевого выключателя 14 и оператору немедленно поступает звуковой 22 и световой 21 сигнал о необходимости вмешаться в работу механизма размотки кабеля. Если этого не,сделать, то через заданный промежуток времени сработает реле 20 задержки времени сигнала управления, электромагнит 23 будет запктан и золотник 24 соединит напорную гидролинию 16 гидррсистемь с гидроцилиндром 27, который посредством гибкой связи 28 выключит бортовые фрикционы и машина остановится. В это время размотка кабеля будет продолжаться.. При уменьшении усилия на блоке 1 пружины 7 и 8 переместят штан- ги 3 и 4, концевой.выключатель 14 разомкнет контакты, обесточив электромагнит 23, золотник 24 соединит полость гидроцилиндра 27 через дроссель со сливной магистралью гидросистемы и гидроцилиндра 27, при помощи гибкой тяги 28 плавно включит движитель машины и процесс укладки кабеля возобновится.
Наличие системы автоматического управления подачи кабеля световода обеспечивает работу машины в автоматическом режиме, предохранение от деформации кабеля, имеющего ограничения на величину изгиба и растяжения, а также позволяет высвободить второго оператора на машине, обеспечивающего ручное управление подачей кабеля.
55
Формула изобретения
Система автоматического регулирования подачи кабеля в рабочий орган кабелеукладчика, содержащая гидромо- ,тор привода размотки бухты, напорную, сливную и проходную гидролинии.
пшрпраспределнтапь, нхол которого подключен к гилромотору, а выход - к гидролиниям, и гилроцилиндр, отличающаяся тем, что, с целью уменьшения усилия натяжения и деформации кябеля световода при укладке, система снабжена регулируемым дросселем, электрогидрораспределите- лем, обратным клапаном, реле времени, концевым выключателем, источником питания, звуковым и световым сигнализато- .рами и датчиком усилия, состоя-дим из . подпружиненного блока,соединенного через штанги с направляющими, причем одна из штанг выполнена с возможностью взаимодействия с концевым выключателем, а другая механически соединена с регулируемым дросселем,вход
7
5
оторогп соединен с гидромотором привода размотки бухты, а выход подключен к гидрораспределителю, а электро- гидрораспределитель подключен к напорной, сливной и проходной гидролиниям и через параллельно включенные дроссель и обратный клапан - к гидроцилиндру, а электромагнит электромагнитного гидродросселя первым выводом подключен к источнику питания, а вторым - к первому выводу реле времени, второй вывод которой через контакты концевого выключателя подключен к источнику питания, а световой и звуковой сигнализаторы включены параллельно друг другу и между вторым выводом реле времени.и первым выводом источника питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| Гидропривод кабелеукладочной машины | 1989 |
|
SU1640307A1 |
| Система управления землеройно-транспортной машины | 1987 |
|
SU1444485A1 |
| Механизм размотки кабельного барабана кабелеукладчика | 1989 |
|
SU1771029A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |
| Гидропривод кабелеукладчика | 1989 |
|
SU1677197A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Кабелеукладочная машина | 1981 |
|
SU1033660A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОДНОКОВШОВОГО ПОГРУЗЧИКА | 2019 |
|
RU2729537C1 |
| Гидравлический привод погрузочно-транспортной машины | 1982 |
|
SU1234539A2 |
Изобретение относится к области строительных и дорожных машин и м.б. использовано на машинах для укладки кабеля. Цель изобретения - уменьшение усилия натяжения и деформации кабеля световода при укладке. Устр-во содержит датчик усилия,состоящий из подпружиненного блока I, установленного на оси 2, штанги 3, 4 и пружины 7,8.Тор- цовая часть штанги 4 соединена с ре- гулирунмым дросселем (РД) 12. Проходя через блок I кабель световода перемещает штанги 3 и 4, которые воздействуют на РД 12. Последний связан с гидромотором и увеличивает подачу жидкости на него. При снижении усилия на блоке 1 РД 12 уменьшает подачу жидкости на гидромотор и уменьшает скорость его вращения. Тем самым регулируется величина усилия, необходимого на размотку кабеля и его изгиб. При полном открытии РД 12 усилие не .снижается и срабатывает сигнализация, с вьщержкой времени машина остановится. 2 ил. .
| Кабелеукладчик | 1983 |
|
SU1229280A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ветров Ю.А., Бападинский В.П Машины для земляных работ | |||
| Киев.: Вища школа, 1980, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| . | |||
