Изобретение относится к автоматическому регулированию и может быть использовано в следящих системах, системах стабилизации и программного управления, в приборах вычислительной техники и автоматики и в другой аппаратуре, содержащей инерционный нелинейный элемент типа зоны нечувствительности, и предназначено для улучшения динамических характеристик этих систем.
Цель изобретения - повьш1ение точности компенсации
На фиг,1 изображена структурная схема устройства компенсации нелинейности.
Устройство компенсации, нелинейности -содержит сумматор 1, инерционное звено 2 и нелинейное звено 3 с зоной нечувствительности, первую модель 4 инерционности звена объекта компенсации, релейный элемент 5, делитель напряжения 6, блок сравнения абсолютных значений 7, ключ 8, вторую модель 9 инерционности звена объекта компенсации
Устройство работает следующим образом.
Блок сравнения абсолютных значений 7 сравнивает абсолютные значения сигналов на выходе делителя напряжения 6 и второй .модели 9 и, если сигнал на выходе делителя напряжения 6 больше сигнала на выходе второй модели 9, то ключ 8 подключает второй вход сумматора 1 к выходу релейного элемента 5, а если меньше, то к выходу делителя напряжения 6.
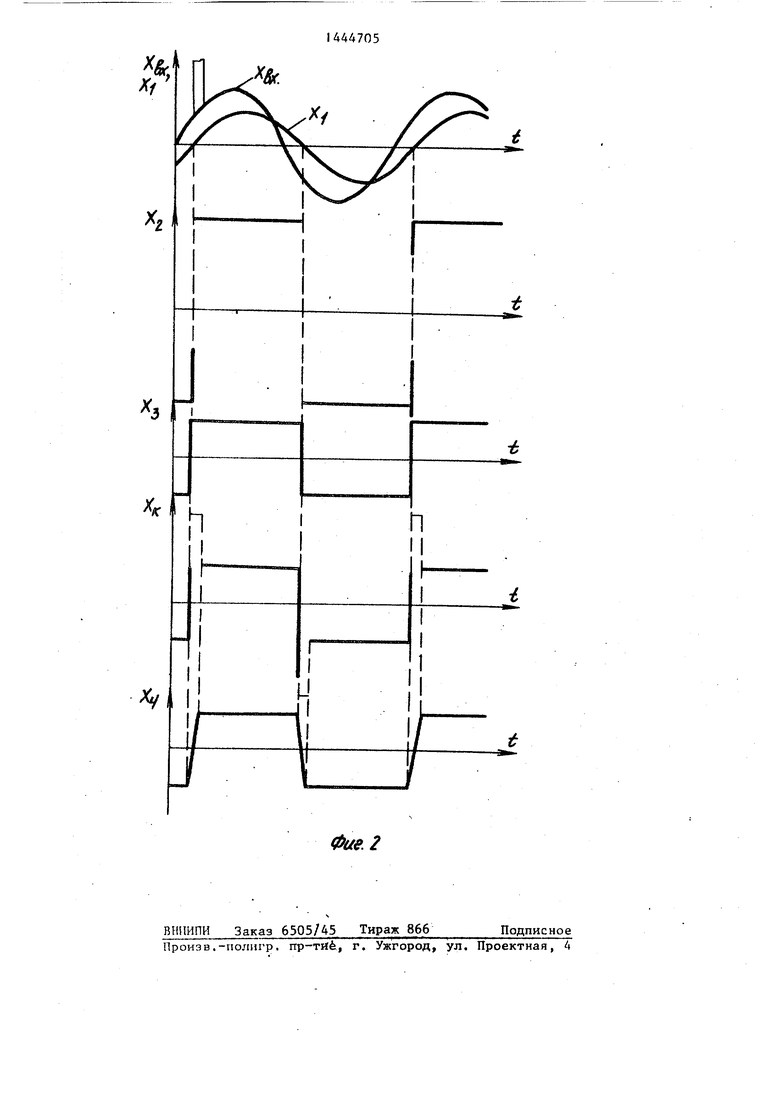
Предположим, что в момент включения системы в работу входной сигнал X-v (с)иг.2) имеет положительньй знак
tJ/v
и в дальнейшем изменяется по гармоническому синусоидальному закону. Тогда сигнал на выходе первой модели 4 инерционности звена Х также станет положительным и в дальнейшем изменяется по такому же закону,имея некоторое фазовое отставание. Релейный элемент 5 преобразует сдвинутый по фазе сигнал в прямоугольное напряжение Xj, которое поступает на первый вход ключа 8 и, уменьшившись в делителе напряжения 6 (сигнал Хз) до величины зоны нечувствительности нелинейного элемента, поступает на второй вход ключа. Поскольку в исходном состоянии сигнал на выходе второй модели 9 инерционности звена
Х был равен нулю, а , то блок сравнения абсолютных значений 7 переводит ключ 8 в положение, соединяющее второй вход сумматора с вькодом релейного элемента 5. С этого момента компенсационный сигнал Х ,равен сигналу на выходе релейного элемента 5, Этот сигнал может во много раз
превышать уровень зоны нечувствительности нелинейного звена 3. Инерционное звено 2 и вторая модель 9 инерционности звена начинают отрабатывать этот сигнал со скоростью максимально возможной для конкретного инерционного нелинейного звена, которая прямо связана с уровнем ограничения релейного элемента 5, При этом сигнал Х, постоянен, а I Х
возрастает. Поскольку сигнал на входе второй модели 9 инерционности звена У - . намного больше сигнала Х,, то через некоторое врейя сигнал на выходе второй модели Х больше Xj. В этот момент блок сравнения абсолютных значений 7 переключает ключ 8 в противоположное состояние, соединив второй вход сумматора 1 с выходом делителя напряжения 6. При
зтом компенсационный сигнал Х,сигнал на выходе делителя напряжения б и сигнап на выходе второй модели 9 инерционности звена Х практически равны. Такие уровни сигналов компенсационного канала сохраняют до момента изменения знака на выходе первой модели 4 и,, следовательно, на выходе релейного элемента 5 и делителя напряжения 6.
При изменении знака входного сигнала, а затем и сигналов на выходе блоков 4-6 изменяется полярность компенсационного сигнала Х. Сигнал на выходе второй модели 9 инерцион- ности звена Х начинает уменьшаться и стает меньше величины Х. Цикл компенсации повторяется.
Такое формирование сигнала обеспечивает минимально возможное время переходного процесса инерционного звена 2 в пределах зоны нечувствительности нелинейного звена 3,
Формула изобретения
Устройство компенсации нелинейности, содержащее сумматор, первую модель инерционности объекта компенсации, вход которой соединен с первьм входом сумматора, а выход с входом релейного элемента, вторую модель инерционности звена объекта компенсации, отличающееся тем, что, с цепью повьшения точности компенсации, дополнительно введены делитель напряжения, ключ и блок сравнения абсолютных значений, причем выход релейного элемента соединен с первым информационным входом ключа
и входом делителя напряжения, выход которого соединен с вторым информационным входом ключа и первым входом блока сравнения абсолютных значений, второй вход которого соединен с выходом второй модели инерционности звена об-ьекта компенсации, а выход - с управляющим входом ключа, выход которого соединен с входом второй модели инерционности эвена объекта компенсации и вторым входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Устройство для компенсации инерционной нелинейности типа насыщения | 1980 |
|
SU940129A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Авторегулятор компенсации емкостных токов для нормального режима работы сети | 1990 |
|
SU1705948A1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |

Изобретение относится к области автоматического управления и регулирования и может быть использовано в следящих системах, системах стабилизации и программного управления, в приборах вычислительной техники и автоматики. Цель изобретения - повышение точности компенсации. Поставленная цель достигается яа счет формирования компенсационного сигналя, при котором в пределах зоны нечувствительности нелинейного звена объекта компенсации обеспе чивается минимально возможное время переходного процесса инерционного звена объекта компенсации. 2 ил.
Фиг.1
Р(Х)
Лу
| Зайцев Г.., Стеклов В.К | |||
| Комбинированные следящие системы | |||
| Киев: Техника, 1978, с.118, рис.59а | |||
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
