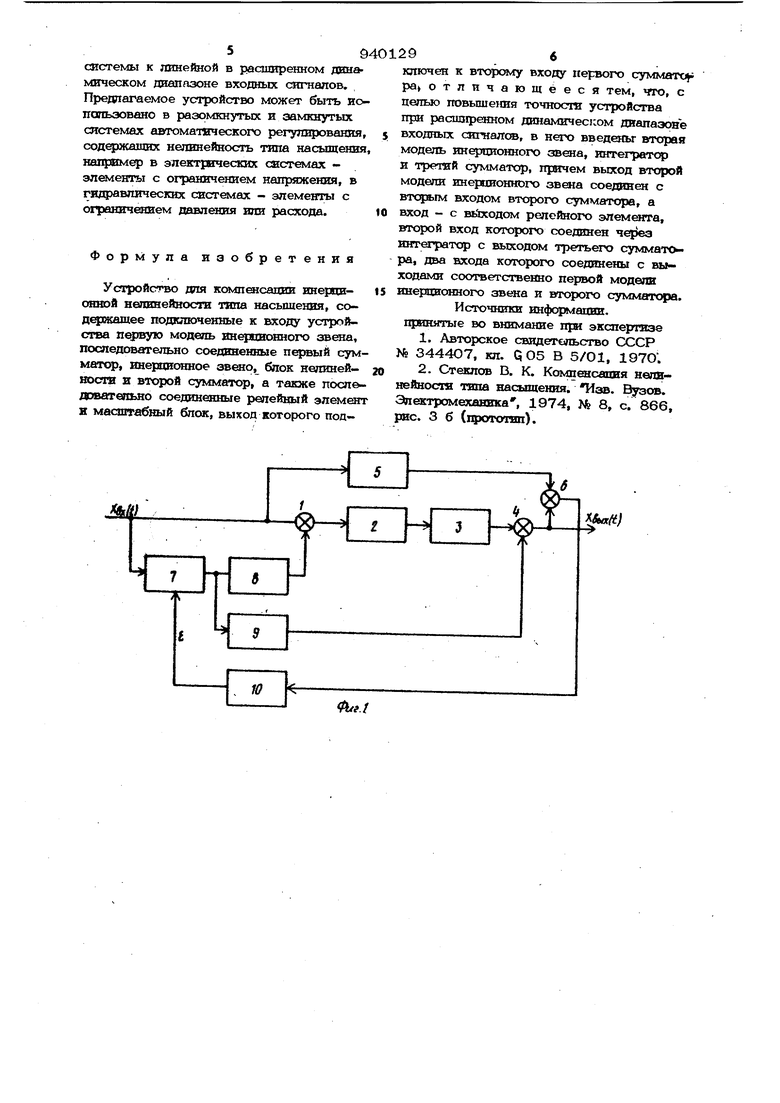
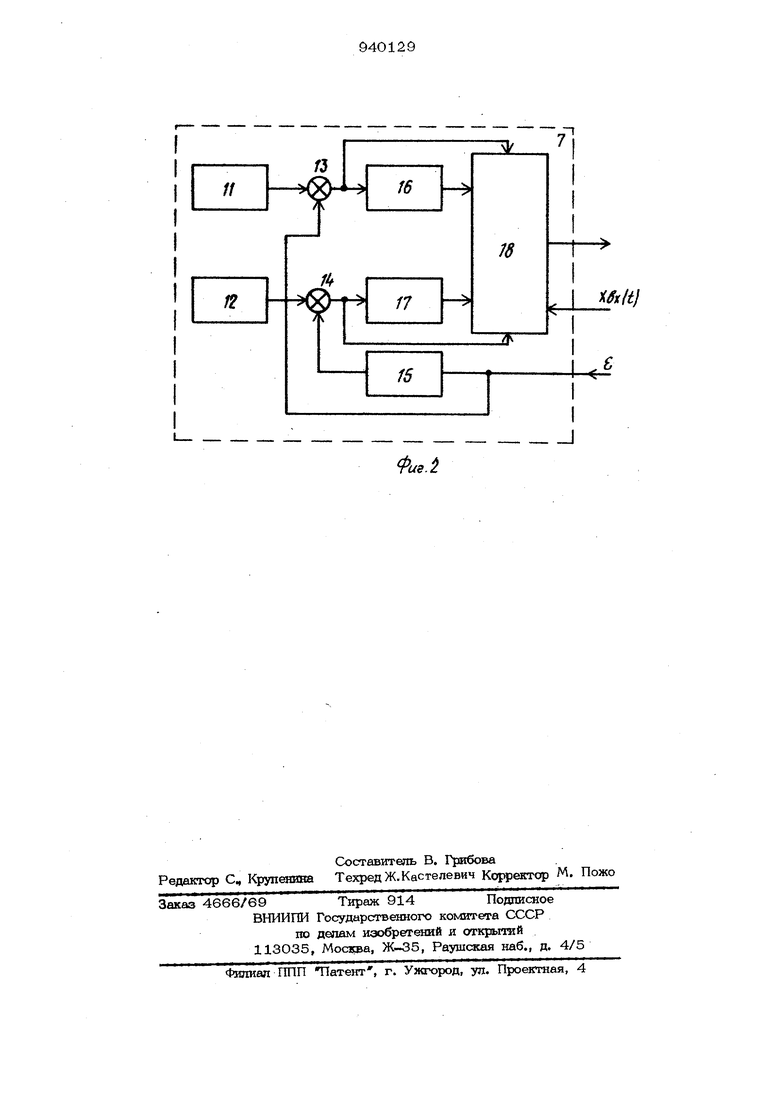
Изобретение относится к автоматичео кому регулированию и может быть исполь аовано в системах, содержащих элементы с иеяинейностью типа насышения. В известных устройствах дття компенсации инерционной нелинейности типа насыщения автоматических систем параллельно нелинейному элементу с насыщением включаются последовательно соединенные нелинейный блок с зоной нечувствительности, модель элемента с насыщением и сумматор, второй вход которого соединен с выходом элемента с насьпдеяв&л tl . . Недостатком указанного устройства является то, что в нем точность компенсации обеспечивается только при безынер дионнс нелинейном элементе насыщения и стационарных параметрах нелинейности На практике большинство нелинейных элементов инеряионньь Известно также устройство для компенсации инерционной непзшейностя типа насыщешш, содержащее последовательно соединенные первый алгебраический сум- матор, инерционное нелинейное звено с характеристикой типа насыщения и второй сумматор, причем вход устройства через последовательно соединенные модель инерционного звена и релейный элемент соединен с вторкым входом второго сумматора, а выход релейного элемента через последовательно соединенные масштабный блок и модель звена, передаточная функция обратна передаточной функции инерционного звена, т.е. дифференцирующее звено, соединен с вторым входом первого алгебраического сумматора 2 . Недостаток известного устройства снижение точности компенсации при быстроизмен$пющихся входных воздействиях вследствие технической сложности точной реализации модели звена с передаточной функцией, обратной передаточиой функции инерционного звена, если инерционное авено имеет порядок вьгше перво1х. Создание точной модели потребовало бы усложнения схстлы устройства, что значительно снизило бы помехозаишшешюсть и надежность устройства. Цель изобретезшя - повышение точности компенсашш иноршгонной нелинейности Т1ша насыщетга независимо от характера входного воздействия. Указанная цель достигается тем, что в устройство для комиенсашги инерционной нелинейности типа насыщения, содержащее подключенные к входу устройства первую модель инерционного звена, последовательно соедиюнные первый сумматор, инерционное звено, блок нелинейности и второй сумматор, а также последовательно соед1шенные релейный элемен и масштабный блок, выход которого подключен к второму входу первого сумматора, введены вторая модель инерционного сэвена, интегратор и третий сумматор, гфичсм выход второй модели инерционного звена соединен с вторым входом втор го сумматора, а вход - с выходом релей ного элемента, второй вход которого сое д1шен через интегратор с выходом треть его сумматора, два входа которого соединены с выходами соответственно первой модели инерционного звена и второго сумматора. Сведение в устройство третьего сумматора позволяет измерить ошибку компенсации незтинейности в любой момент времехш и благодаря связи выход третье го сумматора - интегратор устанавливат уровень смещения и момент его подачи в соответствии с уровнем ограничения нелинейности и характером инерционности благодаря чему стало возможным исключить из цепи формирования смешения дифференцирующее звено и, таким образом, синхронизировать основной сигнал и скгнал смещения без примшения дифферешшрующего звена. Кроме тс«го, введение второй модели занердяионного звена позвсяяет синхронизировать основной сиг нал с выхода нетшнейнсох) элемента и сигнал компенсационного канала, благода чему исключаются фазовые искажения при прохождении быстроиамен5пощегося сиптала, расширяется динамический диапазон входных сигналов и, следовательно повышается точность компенсации. На 4й1г. 1 изображена структурная схема устройства для компенсации инерционной негашейностк типа насыщения; на фиг. 2 - структурная схема релейного элемента. Устройство содержит сумматор 1, ин рпионное звено 2, блок 3 нелинейности типа насыщения, сумматор 4, первую модель инерционного звена 5, сумматор 6, релейный элемент 7, масштабный блок 8, вторую модель инерционного звена 9, интегратор Ю, источники 11 и 12 нитанкя, сумматоры 13 и 14, инвертор 15, делители 16 и 17 напряжения, релейный элемент 18 с характеристикой Tiffla зоны нечувствительности. Устройство работает следующим образом. Входной сигнал проходит по двум каналам - основному и компенсационному. При большой амплитуде входного сигнала на сумматоре 1 величина входного сигнала уменьшается на величину смещения, формируемого релейным элементом 7, а на сумматоре 4 восстанавливается благодаря связи релейный элемент 7 - вторая модель нн яшонного звена 9 - второй вход сумматора 4. Фазовые искажения сигналов исключены, так как на сумматорах происходит сложение сфазнрованных сигналов - на сумматоре 1 суммируются сигналш, при прохождении которых нет временных задержек, на сумматоре 4 суммируются .дрд сигнала, временные параметры которых одинаковы и определяются характером инерционИости и степенью точности второй модели инерционного звена. Входной сигнал поступает также через модель инерционного звена 5 на сумматор 6, где сравнивается с выходным сигналом устройства. Выходной сигнал сумматора 6 равен ошибке устройства и через интегратор управляет величиной зоны нечувствительности и уровнем ограничения релейного элемента 7. Интегратор имеет постоянную времени намного меньше постоянной времени инерционного звена. Поэтому практически мгновенно устанавливакугся параметрт: релейного элемента в соответствии с параметрами блока 3 нелинейности и инерционного эвена 2, тем самым обеспечивая высокую точность компенсашш инерционной нелинейностя без прту1енения дифферендирутеошх звеньев, а значит в расширенном диапазоне входных сигналов по частоте. Экспериментальная проверка подтверждает работоспособность устройства и ее положительные свойства. Положительный эффект при использованни изобретения заключается в повышении точности следящих систем, в которых содержатся нелинейность типа насыщения за счет приближения нелинейной системы к линейной в расширенном данамическом диапазоне входных сигналов. Предлагаемое устройство может быть ио пользовано в разомкнутых и замкнутых системах автоматического регутшрования, содержащих нелинейность типа насыщения капрзмер в электрических системах - , элементы с ограничением напряжения, в гшфавлических системах - элементы с ограничением давления или расхода. Формула изобретения Устройство для компеясании инер«шояной неашнейности типа насыщения, со- дерисащее подключенные к входу устройства первую модель инерожяшого звена, последовательно соединенные первый сум , инерционное звено, блок нелинейнсхтгя и сумматор, а также после довательно соединенные релейщдй элемен и масштабный блок, выход которого ) ключен к второму входу первого сумматор; ра отличающееся тем, что, с целью повышетшя точносге устройства при расширенном динамическом диапазоне входных сигналов, в него введены- вторая модель инерштонного звена, интегратор и третагй сумматор, причем выход второй модели инерционного звена соединен с вторым входом второго сумматора, а вход - с вйходом релейного элемента, второй вход которого соединен через интегратор с выходом третьего сумматора, два входа которого соединены с выхода1.ш соответственно первой модели инерционного звена и второхх суммат чм. Источники информации. npfiHiiTbie во внимание при экспертизе 1.Авторское свидетельство СССР № 3444О7, кл. Q 05 В 5/01, 1970. 2.Стеклов В. К. Компеясапия непянейностя типа насыщения. Изв. Эузов. Электромеханика , 1974, № 8, с. 866, рис. 3 б (щкячэтип).
fj
1
Г6
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1444705A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1550473A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |
/
us.
