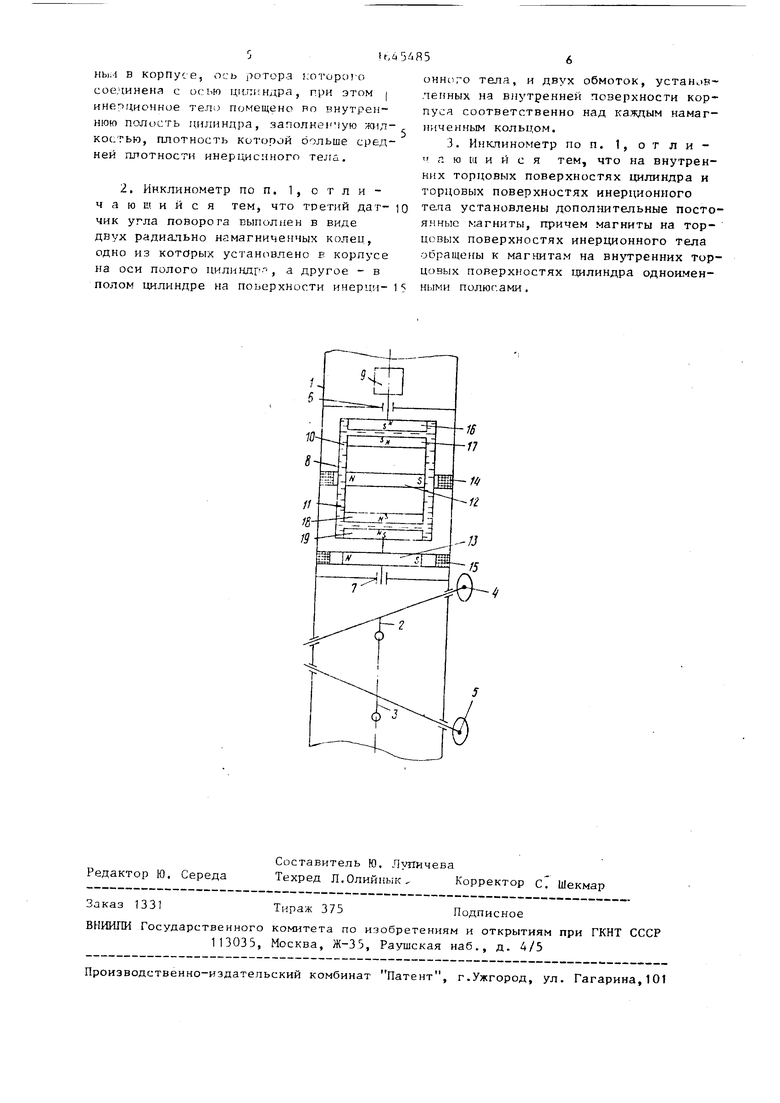
жидкости 11 несколько Ьольше средней i плотности инерционного тела 10, третий датчик угла поворота, выполненный в виде двух радиально намагниченных колец 12 и 13, причем кольцо 13 установлено на оси полого цилиндра 8, а кольцо 12 - на поверхности инерционного тела 10, и двух обмоток 14 и 15, установленных на внутренней поверх- ности корпуса 1 так, чтобы первая обмотка 15 находилась над намагниченным кольцом 13, установленным на оси цилиндра, а вторая обмотка 14 находилась над намагниченным кольцом 12, установленным на поверхности инерционного тела 10. Кроме того, инклинометр содержит дополнительные постоянные магниты 16 - 19, установленные на внутренних торцовых поверхностях ци- линдра 8 и торцовых поверхностях ннер ционного тела 10, причем магниты 17 |и 18 на торцовых поверхностях инерци- |онного тела 10 обращены к магнитам 16 и 19 на внутренних торцовых поверх ностях цилиндра 8 одноименными полюсами .
Плотность жидкости 11 должна быть несколько больше средней плотности инерционного тела 10 для того, чтобы при вращении цилиндра 8 под действием центробежных сил инерционное тело 10 устанавливалось по оси цилиндра 8 и не касалось его стелок. Этим обеспечивается отсутствие сил сухого грения при вращении инерционного тела 10.
Инклинометр работает следующим образом.
Перед, началом измерения в устье скважины прибор ориентирует по аэиму- ту по метке на корпусе 1 относительно выбранного направления и включают двигатель 9, двигатель 9 приводит во вращение с постоянной угловой скоростью цилиндр 8. Под действием робежных сил, возникающих при вращении жидкости 11, инерционное тело 10 устанавливается по оси цилиндра 8 и за счет жидкостного трения начинает Вращаться с той же скоростью.
Благодаря отталкивающей силе постоянных магнитов 16 - 19, установленных на торцах инерционного тела 10 и внутренних торцовых поверхностях цлиндра 8, инерционное тело 10 оказывется свободно подвешенным и не имеет соприкосновения со стенками цилиндра В это время на выходе обмоток 14 и 15 третьего датчика угла появляются
синусоидальные сигналы с частотой, равном частоте вращения двигателя 9, с разностью фаз, обусловленной произвольной первоначальной установкой намагниченных колец 12 и 13 относительно друг друга. Фиксируют эту разность фаз, которую принимают за начапо отсчета. Затем на кабеле производится спуск прибора в скважину с непрерывной регистрацией данных с датчиков 4 и 5 углов поворота и разности фаз сигналов с обмоток 14 и 15 третьего датчик, угла. При спуске корпус 1 прибора совершает круговые вращательныр движения относительно собственной оси вследствие тпения о стенки скважины, наличия момента закручивания кабеля и г.д. При этом вращение инерционного тела 10 отстает от вращения цилиндра 8, и мзмр.ненпе разности Фаз с обмоток 14 и 15 третьего датчика угла пропорционально углу Ср поворота корпуса 1 прибора вокруг собственном оси. С датчиков 4 и 5 снимается сигнал, пропорциональный углам поворота Р f и А маятников 2 и ). При эг:ом азимут и зенитным угол 0 вычисляют по формулам
tj.. arct(, tS Ј Lsin :rsA- costP. tp,p2- /V sirup
0 arete -J tg2, +tg2 ,
где (Р - угол поворота корпуса 1 прибора относительно собствен- ной оси;
|3, ,. углы поворота маятников 2 и 3
Формула изобретения
1. Инклинометр, содержащий корпус, в котором утановлены дра ортогональных маятника с первым и вторым датчиками углов поворота на осях вращения маятников, сбалансированное по отношению к оси вращения инерционное тело, находящееся в жидкости, опоры вращения, третий датчик угла поворота размещенный на оси вращения инерционного тела, которая совпадает с продольно - осью корпуса, о т л и ч а ю- щ и и с я тем, что, с целью повышения точности измерений, он снабжен установленным в корпусе на опорах вращения полым цилиндром, ось вращения которого совпадает t продольной осью корпуса, двигателем, установленныл в корпусе, ось ротора iотирсп о сое шнена с осью цигтгндра, при этом | инерционное тело помещено во внутреннюю полость цилиндра, заполненную жидкое, г ью, плотность которой оольше средней плотности инерционного тела.
2. Инклинометр по п. 1, отличающийся тем, что третий да г- чик угла поворота выполнен в виде ДВУХ радиально намагниченных колеи, одно из которых установлено в корпусе на оси полого цилиндр 1, а другое - в полом цилиндре на поверхности ичерцч-
онного тела, и двух обмоток, установ- ченных на внутренней поверхности корпуса соответственно над каодым намагниченным кольцом.
3. Инклинометр по п. 1, о т л и - а ю ш и и с я тем, что на внутренних торцовых поверхностях цилиндра и торцовых поверхностях инерционного теаа установлены дополнительные постоянные магниты, причем магниты на торцовых поверхностях инерционного тела обращены к магнитам на внутренних торцовых поверхностях цилиндра одноименными полюсами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1987 |
|
SU1446288A1 |
| ИНКЛИНОМЕТР | 1972 |
|
SU355338A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1983 |
|
SU1134705A1 |
| Инклинометр | 1988 |
|
SU1569403A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АЗИМУТА И УГЛА ВРАЩЕНИЯ СКВАЖИННЫХ ПРИБОРОВ | 1999 |
|
RU2168010C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| ПОПЛАВКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1973 |
|
SU1839860A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Инклинометр | 1982 |
|
SU1082939A1 |