4 1
сд
фда/
Изобретение относится к производству пружин, в частности к оборудованию для навивки пружин из проволоки малого диаметра.
Цель изобретения - расширение технологических возможностей и повышение производительности за счет сокращения времени на переналадку автомата.
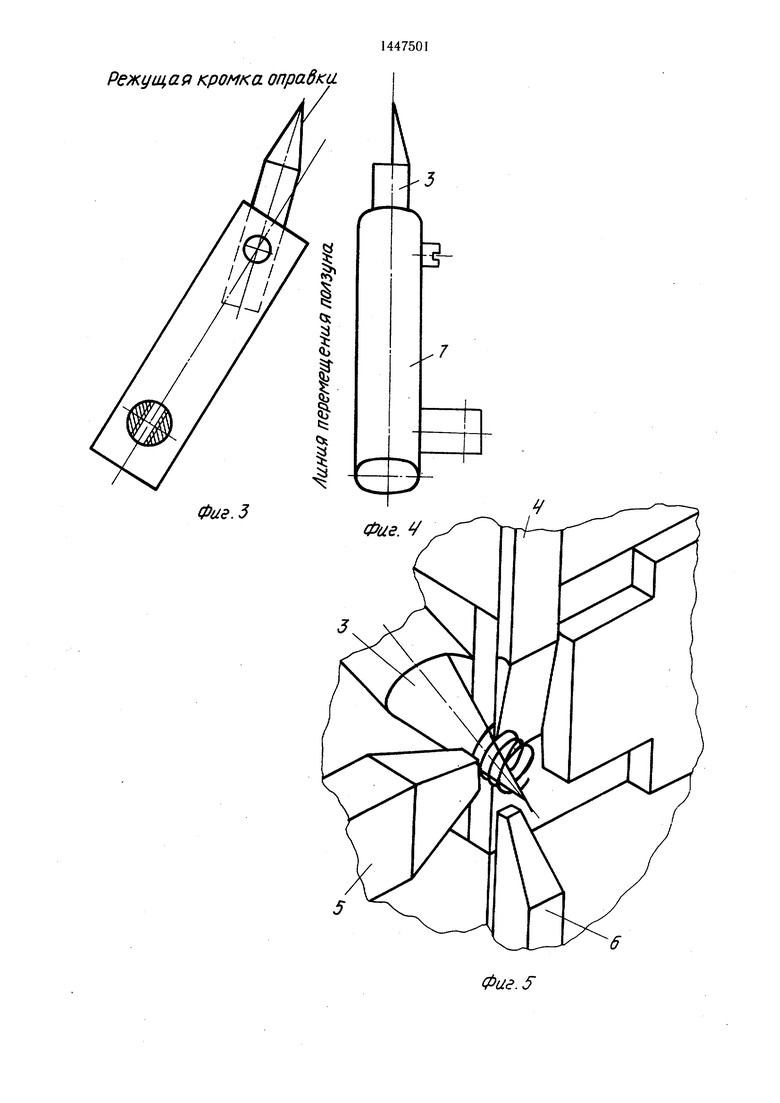
На фиг. 1 изображен узел навивки пружин; на фиг. 2 - установка оправки в этом узле; на фиг. 3 и 4 - оправ- Q с конусной оправкой 3. При этом благо- ка; на фиг. 5 и б - автомат для даря тому, что ось перемещения ползуна навивки пружин, аксонометрия.параллельна одной из образующих конуса,
Автомат содержит подающие ролики 1, направляющую 2 для проволоки, оправку 3, шаговую лапку 4, радиусный упор 5 и отрезной нож 6. Кроме того, автомат со- 5 держит привод подающих роликов, шаговой лапки и отрезного ножа, кинематически связанные между собой, и устройство перемещения конусной оправки (см. фиг. 2), состоящее из расположенного в направляю- jn ролики, проводковое устройство, радиусный щих ползуна 7, взаимодействующего с упор с механизмом его перемещения, ща- регулировочным винтом 8, причем ось пере-говую лапку, оправку с режущей кромкой
мещения ползуна с закрепленной в неми подвижный нож, размещенные между пооправкой располагается параллельно об- дающими роликами и радиусным упором, разующей конуса.отличающийся тем, что, с целью расщиАвтомат работает следующим образом. 25 рения технологических возможностей и повыПеред началом работы проволока за-шения производительности за счет сокращения времени на переналадку автомата, оправка выполнена состоящей из цилиндрической и конической частей, из которых коническая часть наполовину срезана по вертикальной плоскости, проходящей через продольную ось оправки, с образованием
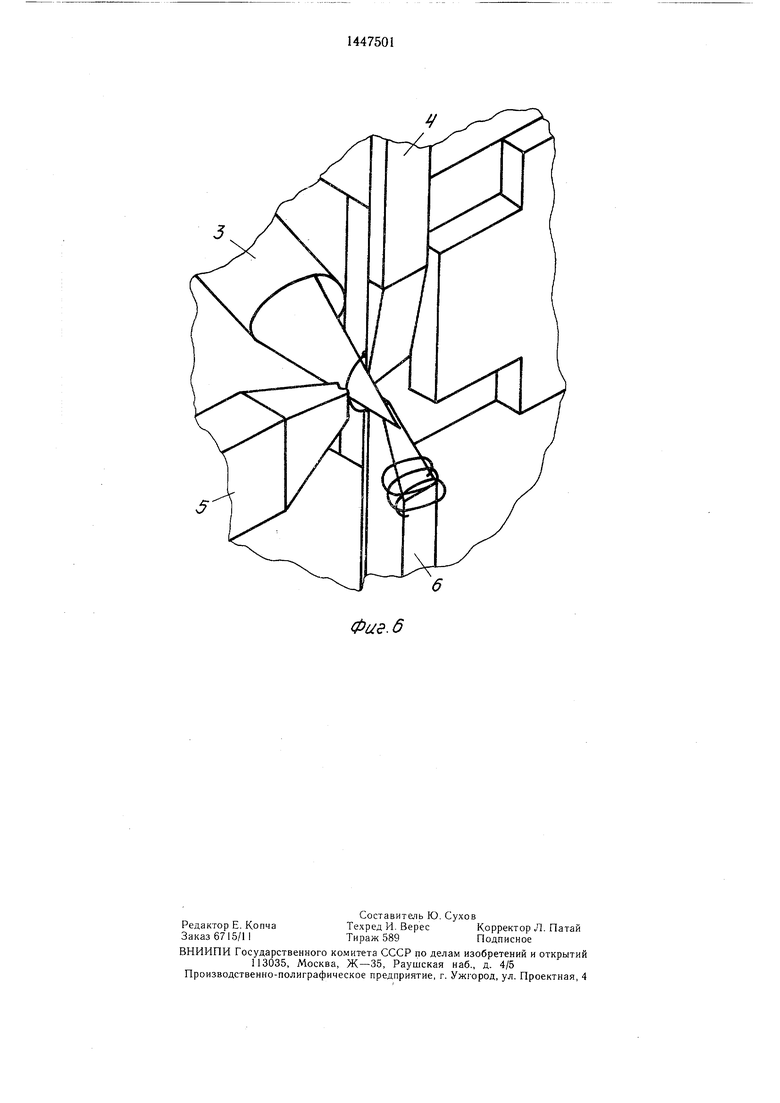
достижении необходимого числа витков подача проволоки прекращается, производится отрезка навитой пружины ножом 6, взаимодействующим со срезанным краем конусной оправки 3.
При необходимости переналадки автомата на другой диаметр пружины достаточно, кроме регулировки положения радиусного упора 5, вывести регулировочным винтом 8 в нужное положение ползун 7
отпадает необходимость регулировки оправки в вертикальной плоскости.
Формула изобретения
Автомат для навивки пружин, содержащий смонтированные на основании и кине- .матически связанные приводные подающие
правляется вручную между роликами в направляющую 2 и огибает оправку 3 Затем устанавливают в нужное положение радиусный упор 5 и об конусную оправку 3 отрезают ножом 6 конец проволоки. Автомат готов к работе.
При включении автомата проволока, проходящая через подающие ролики 1, направляющую 2, упирается в радиусный упор 5, который заставляет проволоку обвиться вокруг оправки 3. Шаговая лапка 4 заставляет виться проволоку по винтовой линии с заданным шагом. При
30
35
режущей кромки, при этом оправка установлена на введенном в автомат ползуне так, что одна из образующих конуса, расположенная в плоскости перемещения ползуна, параллельна оси перемещения ползуна, а другая параллельна оси навивания пружис конусной оправкой 3. При этом благо- даря тому, что ось перемещения ползуна параллельна одной из образующих конуса,
достижении необходимого числа витков подача проволоки прекращается, производится отрезка навитой пружины ножом 6, взаимодействующим со срезанным краем конусной оправки 3.
При необходимости переналадки автомата на другой диаметр пружины достаточно, кроме регулировки положения радиусного упора 5, вывести регулировочным винтом 8 в нужное положение ползун 7
с конусной оправкой 3. При этом благо- даря тому, что ось перемещения ползуна параллельна одной из образующих конуса,
ролики, проводковое устройство, радиусный упор с механизмом его перемещения, ща- говую лапку, оправку с режущей кромкой
отпадает необходимость регулировки оправки в вертикальной плоскости.
Формула изобретения
Автомат для навивки пружин, содержащий смонтированные на основании и кине- .матически связанные приводные подающие
35
режущей кромки, при этом оправка установлена на введенном в автомат ползуне так, что одна из образующих конуса, расположенная в плоскости перемещения ползуна, параллельна оси перемещения ползуна, а другая параллельна оси навивания пружи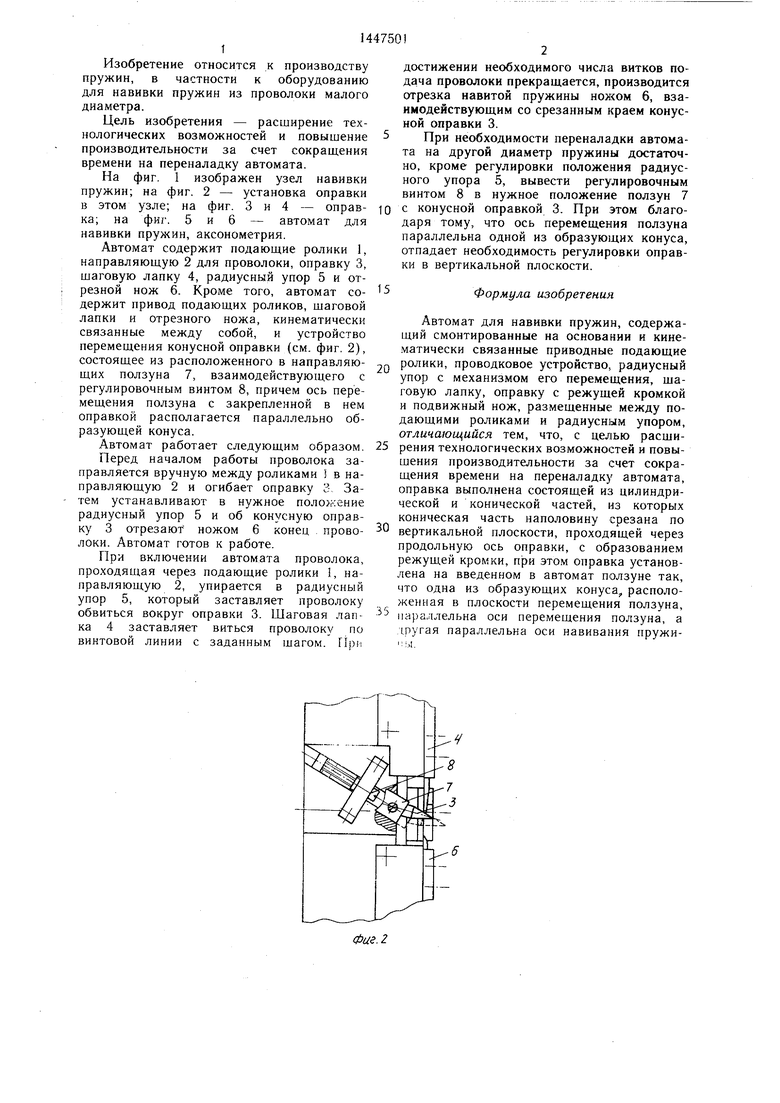
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1975 |
|
SU553031A1 |
| Станок для изготовления пружин с отогнутым концом | 1971 |
|
SU438478A1 |
| Автомат для навивки пружин | 1980 |
|
SU996011A1 |
| Автомат для навивки пружин | 1989 |
|
SU1632593A2 |
| Автомат для навивки пружин | 1978 |
|
SU776725A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
| Пружинно-навивочный автомат | 1960 |
|
SU137101A1 |
| Автомат для изготовления пружин с одним отогнутым внутрь концом | 1978 |
|
SU764801A1 |
| Многопозиционный сборочный автомат | 1976 |
|
SU560726A1 |
Изобретение относится к производству пружин, в частности к оборудованию для навивки пружин из проволоки малого диаметра, и позволяет расширить технологические возможиости и повысить производительность. Автомат содержит подающие ролики 1, направляющую для проволоки 2, оправку 3, щаговую лапку 4, радиусный упор 5 и отрезной нож 6. Кроме того, автомат содержит приводы подающих роликов, шаговой лапки и отрезного ножа, кинематически связанные между собой, и устройство перемещения конусной оправки, состоящее из расположенного в направляющих ползуна, взаимодействующего с регулировочным винтом, причем ось перемещения ползуна с закрепленной в нем оправкой располагается параллельно образующей конуса. Перед началом работы проволока заправляется вручную между роликами 1 в направляющую 2 и огибает оправку 3. Затем устанавливают в нужное положение радиусный упор 5 и об конусную оправку 3 отрезают ножом 6 конец проволоки. При включении автомата проволока через подающие ролики I и направляющую 2 упирается в радиусный упор 5, который заставляет проволоку обвиться вокруг оправки 3. Шаговая лапка 4 заставляет виться проволоку по винтовой линии с заданным щагом. При достижении необ- д ходимого числа витков подача проволоки прекращается, производится отрезка навитой пружины ножом 6, взаимодействующим со срезанным краем конусной оправки 3. 6 ил. (Л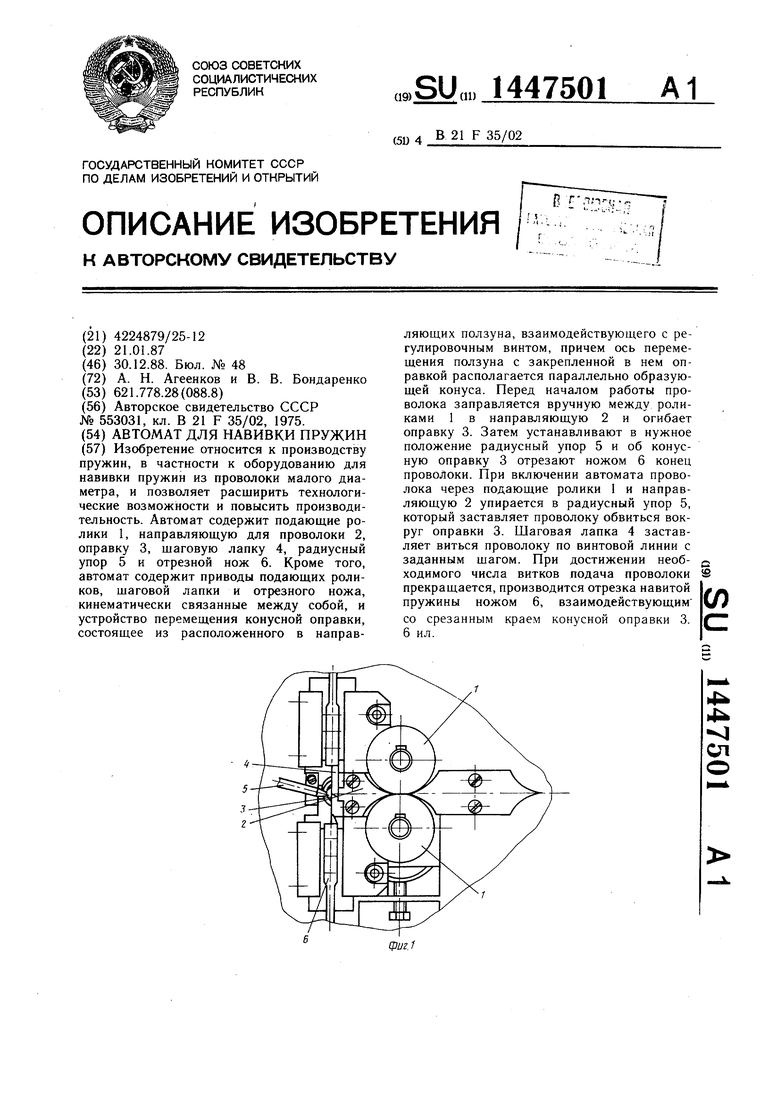
Режущар кромка оправка
Фае. 5
7
0ue.J
S
Фие.6
| Автомат для навивки пружин | 1975 |
|
SU553031A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
