Фиг.
N
со сх
О5
15
Изобретение относится к технике непрерывного действия, предназначенной для открытой разработки полезных ископаемых, а именно к вскрышным и добычным роторным экскаваторам.
Цель изобретения - повышение надежности работы путем устранения действия ударных нагрузок, передаваемых на элементы конструкции.
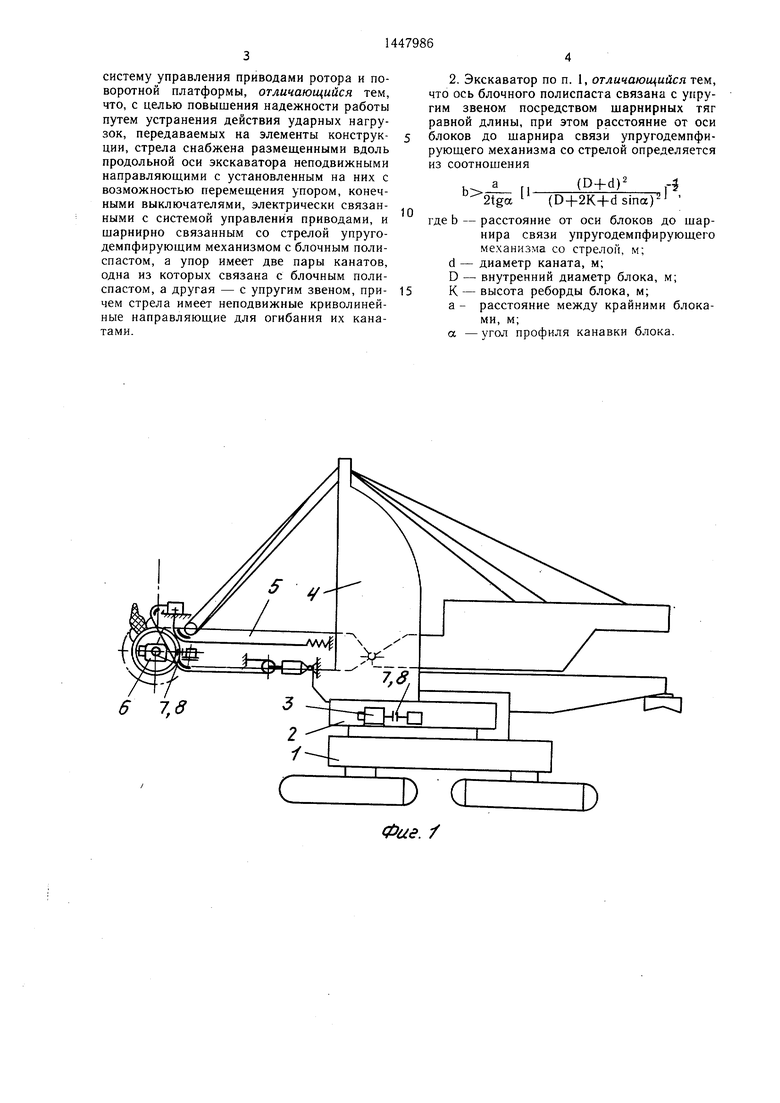
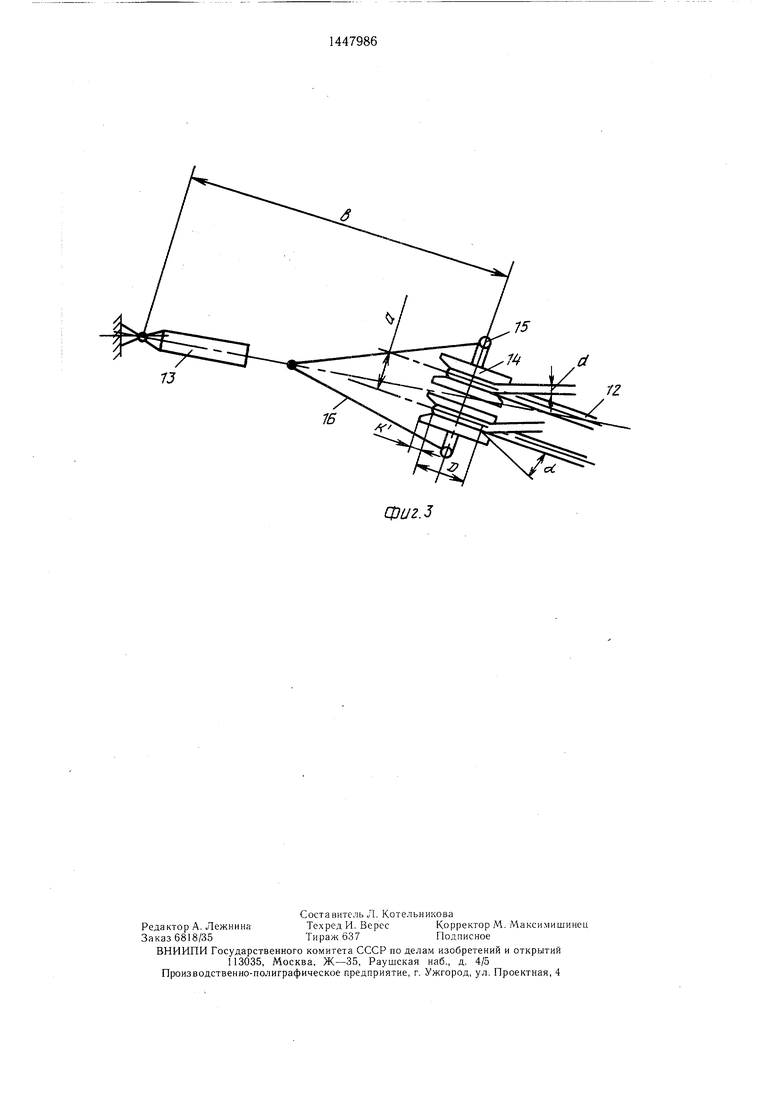
На фиг. 1 изображен роторный экскаватор, обший вид; на фиг. 2 - кинематическая схема канатно-упругодемпферной системы с подвижным упором; на фиг. 3 - схема расположения полиспастиой системы с упругодемпферным устройством.
Роторный экскаватор состоит из ходовой части с опорной базой 1, поворотной платформы 2 с механизмом 3 привода поворота, верхнего строения 4, роторной стрелы 5 с механизмом 6 привода вращения ротора, муфт предельного момента, упругих звеньев управляюш.его механизма 7, 8 и системы управления и блокировки двигателями, снабженной тахогенераторами в приводах враше- ния ротора 6 и поворота 3.
Канатно-упругодемпферная система с подвижным упором состоит из подвижного силового упора 9, размещенного на продольных направляющих 10, размещенных вдоль продольной оси экскаватора, имеющих выступ, ограничивающий одностороннее продольное перемещение последнего, криволинейных направляющих 11, двух пар канатов 12, шарнирно связанного со стрелой упругодемпфирующего механизма 13, блочного полиспаста 14 с осью 15 и тягами 16, упругих звеньев в виде амортизаторов 17, конечных выключателей 18, электрически связанных с системой управления приводами.
Роторный экскаватор работает следующим образом.
Недробимое крупногабаритное тело при попадании в ковш ротора перемещается по круговой траектории до контакта с подвижным силовым упором 9, который вовлекается в движение. Для уменьшения давления подвижного силового упора 9 на продольные направляющие 10 они могут быть установлены с наклоном или иметь криволинейный профиль по форме, близкой траектории движения недробимого крупногабаритного тела.
Перемещение подвижного силового упора 9 передается через канаты 12, огибающие криволинейные направляющие 11, блочному полиспасту с осью 15 и далее через тяги 16 на упругодемпфирующий механизм 13, в котором гасится основная часть кинетической энергии, запасенной вращающимся ротором с приводом. Остальная часть кинетической энергии гасится силами трения между подвижным силовым упором 9 и продольными направляющими 10, а также между канатами 12 и криволинейными на0
5
0
5
0
5
правляющими 11. Для предотвращения отрыва подвижного силового упора 9 от irpo- дольных направляющих 10 при действии ударной нагрузки подвижный упор 9 прижимается к продольным направляющим 10 канатами 12, идущими в поперечном направлении через криволинейные направляющие 11 на упругие амортизаторы 17.
При перемещении подвижного силового упора 9 он воздействует на конечные выключатели 18, которые через стандартную электрическую цепь и релейную систему воздействуют на размыкание постоянно замкнутых контактов в цепи управления двигателями поворота 3 и вращения ротора 6, ведущего к отключению двигателей от сети. Указанная система блокировки повыщает надежность защиты перегрузки. При этом управлять отключением двигателей может предлагаемая или существующая система блокировки. В любом из случаев отключения двигателей гашение кинетической энергии вращающегося ротора с приводом осуществляется подвижным упором 9 с канатами 12, криволинейными направляющими 11 и упруго- демпфирующим механизмом 13.
При внецентровом воздействии ударной нагрузки на подвижный силовой упор 9 в парных канатах 12, идущих на полиспаст, возникает разное усилие. В результате этого происходит поворот оси блоков полиспаст- ной системы на некоторый угол. Для предотвращения схода канатов с блоков указанный угол поворота оси 15 блоков в плоскости оси 15 с тягами 16 должен быть ограничен за счет обеспечения необходимого расстояния b от оси блоков до точки крепления упругодемпфирующего механизма 13 со стойкой.
При этом расстояние от оси блоков до шарнира связи упругодемпфирующего механизма со стрелой определено соотно- щением
.Ь
(D + d)
2tga (D-f 2K+d sinap
где b - расстояние от оси блоков до шарнира связи упругодемпфируюшего механизма со стрелой, м;
d - диаметр каната, м;
D - внутренний диаметр блока, м;
К - высота реборды блока, м;
а - расстояние между крайними блоками, м;
а - угол профиля канавки блока.
Формула изобретения
1. Роторный экскаватор, включающий ходовую часть с опорной базой, поворотную платформу с -приводом, верхнее строение, стрелу с установленным на ней приводным ротором, муфты предельного момента упругие звенья, управляющий механизм.
систему управления приводами ротора и поворотной платформы, отличающийся тем, что, с целью повышения надежности работы путем устранения действия ударных нагрузок, передаваемых на элементы конструкции, стрела снабжена размещенными вдоль продольной оси экскаватора неподвижными направляющими с установленным на них с возможностью перемещения упором, конечными выключателями, электрически связанными с системой управления приводами, и шарнирно связанным со стрелой упруго- демпфирующим механизмом с блочным полиспастом, а упор имеет две пары канатов, одна из которых связана с блочным полиспастом, а другая - с упругим звеном, причем стрела имеет неподвижные криволинейные направляющие для огибания их канатами.
5
2. Экскаватор по п. 1, отличающийся тем, что ось блочного полиспаста связана с упругим звеном посредством щарнирных тяг равной длины, при этом расстояние от оси блоков до щарнира связи упругодемпфи- руюшего механизма со стрелой определяется из соотношения
U а ,.(D+d)
b ;Ti:-: 1
Л
2t I- (D+2K+dsina)
где b - расстояние от оси блоков до щарнира связи упругодемпфирующего механизма со стрелой, м;
d - диаметр каната, м;
Dвнутренний диаметр блока, м;
К - высота реборды блока, м;
а - расстояние между крайними блоками, м;
а -угол профиля канавки блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1987 |
|
SU1530678A1 |
| Устройство для подвески стрелы рабочего органа роторного экскаватора | 1982 |
|
SU1087622A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1970 |
|
SU282157A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ И ИЗВЛЕЧЕНИЯ СВАЙ ИЛИ ШПУНТА | 2001 |
|
RU2188276C1 |
| Сменное оборудование драглайна к одноковшовому гидравлическому экскаватору | 1991 |
|
SU1810423A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1969 |
|
SU244209A1 |
| Одноковшовый экскаватор | 1976 |
|
SU616372A1 |
| Рабочее оборудование роторного экскаватора | 1972 |
|
SU478097A1 |
| Роторный экскаватор | 1980 |
|
SU941474A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯДОПУСТИМЫХ ДИНАМИЧЕСКИХ НАГРУЗОК НА ПРИВОДРАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU422821A1 |
Изобретение относится к технике непрерывного действия, предназначенной для открытой разработки полезных ископаемых. Цель - повышение надежности работы путем устранения действия ударных нагрузок, передаваемых на элементы конструкции. Роторный экскаватор включает ходовую часть с опорной базой, поворотную платформу с приводом и стрелу с установленным на ней приводным ротором. Вдоль продольной оси экскаватора размещены продольные направляющие (Н) 10 с установленным на них с возможностью перемещения упором 9. Упор имеет две пары канатов 12, одна из которых связана с блочным полиспастом 14, а другая - с упругим звеном 17. С полиспастом связан упруго- демпфирующий механизм 13. Конечные выключатели 18 электрически связаны с системой управления приводами. Перемещение упора 9, вовлекаемого в движение крупногабаритным телом, попавшим в ковщ ротора, передается через канаты 12 блочному полиспасту 14 с осью 15. Канаты 12 при этом огибают криволинейные НИ. Далее через тяги 16 движение передается на упругодемпфи- рующий механизм 13. В нем гасится основная часть кинетической энергии, запасенной ротором. При перемещении подвижный упор 9 воздействует на конечные выключатели 18. 1 3. п. ф-лы, 3 ил. ю (Л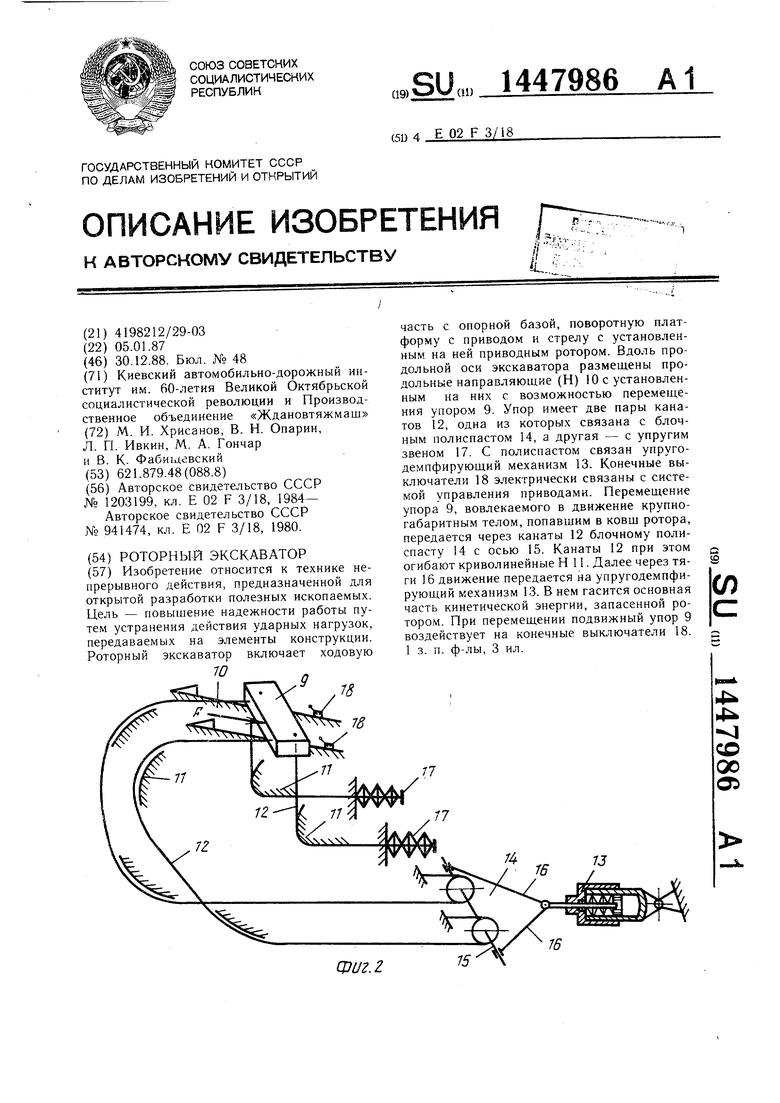
. /
7J
П
фиг.З
| Роторный экскаватор | 1984 |
|
SU1203199A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
